一种同步轨道带星群多目标观测轨道面公共路径设计方法与流程
1.本公开实施例涉及卫星观测技术领域,尤其涉及一种同步轨道带星群多目标观测轨道面公共路径设计方法。
背景技术:
2.地球同步轨道带(简称geo轨道带)是指地球赤道上空35785km附近
±
15
°
倾角范围内宽度为22077km的360
°
环带。该地球同步轨道带自身动力学特性赋予了其相对地表良好的覆盖稳定性,即轨道带上的卫星具有和地球旋转角速度相同或相近的特征,从地面上看该轨道带上的卫星相对地面静止,使该轨道带布置的卫星可以24小时不间断长期凝视地面固定区域,因此,地球同步轨道带成为现代导航通信、数据中继、气象观测等领域高价值太空资产的聚集地。因此,对在轨卫星的监测是在轨服务的重要内容之一,可以为卫星的维修、补加以及运行管理提供支撑。
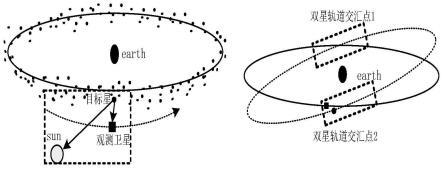
3.目前,对同步轨道带目标星观测成像,是高轨观测器高于或低于同步轨道,使其以一定漂移率西漂(高于同步轨道)或东漂(低于同步轨道),利用观测器与地球静止轨道(geo卫星)相对运动,如图1所示,高轨观测器在与各目标星依次交会时,实现对各目标星观测成像。
4.由于同步轨道带大部分目标星轨道面接近于赤道面,常规的同步轨道带目标星成像路径设计,选择赤道面为观测轨道面,仅通过对观测器轨道高度进行控制,及动态调整观测器漂移率,从而建立观测器与各经度节点目标星合理交会时机,以实现对观测带各经度节点目标星观测。
5.但上述常规的同步轨道带目标星观测成像路径设计思想,本质上默认了观测目标星轨道面皆为赤道面(i≈0
°
,i为轨道倾角)的前提条件,没有以目标星实际轨道为观测量,针对性的建立观测轨道面。在工程实际应用中,若采用上述常规观测路径设计思想,观测器对轨道倾角较大目标星观测期间,由于双星法向交会速度较大、观测时间短,导致大量目标星错失有效观测时机,观测成像效率较低,无法满足观测任务需求。
6.因此,有必要改善上述相关技术方案中存在的一个或者多个问题。
7.需要注意的是,本部分旨在为权利要求书中陈述的本公开的技术方案提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
8.本公开实施例的目的在于提供一种同步轨道带星群多目标观测轨道面公共路径设计方法,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
9.本公开实施例提供一种同步轨道带星群多目标观测轨道面公共路径设计方法,包括:
10.获取同步轨道带星群n个目标星的轨道星历及观测卫星的初始轨道星历;
11.建立所述观测卫星的观测轨道面公共路径模型,通过所述目标星的轨道星历设定与所述n个目标星轨道面对应的多个观测量,及设定所述观测卫星的观测轨道面公共路径,以通过多个所述观测量形成所述观测卫星观测轨道面公共路径的目标函数模型式;
12.建立预设迭代算法模型,遍历求解所述目标函数模型式的极值点;
13.设立所述预设迭代算法模型的阈值ε(;
14.当所述目标函数模型式的极值点小于或等于所述阈值ε(时,则停止运算,此时所述目标函数模型式中的所述观测轨道面公共路径为最优观测轨道面公共路径;
15.以所述最优观测轨道面公共路径调整所述观测卫星运行轨道,并更新所述观测卫星的轨道星历。
16.本公开的一实施例中,建立所述观测卫星的观测轨道面公共路径模型包括:
17.设多个所述观测量为设观测轨道面公共路径为xg(ig,ωg),其中,i为轨道倾角,ω为升交点赤经;
18.建立天球坐标系,选择n个所述目标星中的第k个观测目标,将所述观测卫星和所述第k个观测目标在所述天球坐标系中进行投影,设所述第k个观测目标的轨道倾角和升交点赤经为设所述观测卫星轨道面与所述第k个观测目标轨道面间的夹角为
19.在所述天球坐标系中,根据球面形余弦定理,建立所述观测轨道面公共路径xg(ig,ωg)与所述夹角及所述第k个观测目标的关系式(1):
[0020][0021]
本公开的一实施例中,建立所述观测卫星的观测轨道面公共路径模型还包括:
[0022]
通过所述观测轨道面公共路径xg(ig,ωg)与多个所述观测量xm的各目标星形成夹角集群α;
[0023]
根据所述夹角集群α平方的和建立所述观测卫星观测轨道面公共路径xg的目标函数模型式(2):
[0024][0025]
本公开的一实施例中,所述建立预设迭代算法模型,遍历求解所述目标函数模型式的极值点步骤包括:
[0026]
令o(ig,ωg)的导数等于零,得式(3):
[0027][0028]
其中,所述式(3)的解为所述目标函数模型式(2)的极值点;
[0029]
利用牛顿迭代法,通过所述观测量xm对所述目标函数模型式(2)遍历求解。
[0030]
本公开的一实施例中,对所述目标函数模型式(2)遍历求解的步骤包括:
[0031]
令
[0032]
牛顿迭代解算方程式(4)为:
[0033][0034]
x0为x的初值,取值为:
[0035]
将所述初值代入式(4)中进行迭代运算,运算式如式(5):
[0036][0037]
若x
j+1-xj≤ε,则停止迭代计算,则x
j+1
的解为所述目标函数模型式(2)的极值点。
[0038]
本公开的一实施例中,将所述x
j+1
的解代入所述目标函数模型式的二阶导数式(6)中:
[0039][0040]
若式(6)成立,则当所述观测卫星观测轨道面公共路径为时o达
到最小极值点。
[0041]
本公开的一实施例中,所述建立所述观测卫星的观测轨道面公共路径模型步骤前包括:
[0042]
设定所述同步轨道带星群n个目标星所对应的权重值。。
[0043]
本公开的一实施例中,该方法还包括:
[0044]
所述观测卫星沿所述最优观测轨道面公共路径对n个所述目标星进行观测,并动态调整该观测卫星的漂移率,以提高对单个目标星的观测成像质量。
[0045]
本公开的一实施例中,所述阈值ε=10-5
。
[0046]
本公开的实施例提供的技术方案可以包括以下有益效果:
[0047]
本公开实施例中的一种同步轨道带星群多目标观测轨道面公共路径设计方法,通过采用一次轨道面控制,建立不变观测面公共路径,在满足观测目标最多有效观测的同时,规避了节点单星多批次轨道面控制,极大节约了燃料消耗;另外,相对常规赤道面观测路径,解决了大倾角目标观测筛查观测难的问题,极大提高了目标有效观测覆盖率。
附图说明
[0048]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0049]
图1示出现有技术中同步轨道带星群多目标星依次交会观测示意图;
[0050]
图2示出本公开示例性实施例中同步轨道带星群多目标观测轨道面公共路径设计方法流程图;
[0051]
图3示出本公开示例性实施例中同步轨道带星群多目标星轨道面公共路径目标函数模型建立几何示意图;
[0052]
图4示出本公开示例性实施例中同步轨道带星群多目标星轨道面公共路径寻优流程图;
[0053]
图5示出本公开示例性实施例中优化轨道、0倾角和原轨道与目标星群夹角差比较仿真图;
[0054]
图6示出本公开示例性实施例中0.5
°
/天优化轨道、0倾角和原轨道遍历观测路径成像效果比较图;
[0055]
图7示出本公开示例性实施例中优化轨道、0倾角和原轨道与目标星群夹角差比较仿真图;
[0056]
图8示出本公开示例性实施例中0.5
°
/天优化轨道、0倾角和原轨道遍历筛选目标观测路径成像效果。
具体实施方式
[0057]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本公开将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结
构或特性可以以任何合适的方式结合在一个或更多实施方式中。
[0058]
此外,附图仅为本公开实施例的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。
[0059]
本示例实施方式中提供一种同步轨道带星群多目标观测轨道面公共路径设计方法,可以包括:
[0060]
步骤s101,获取同步轨道带星群n个目标星的轨道星历及观测卫星的初始轨道星历。
[0061]
步骤s102,建立所述观测卫星的观测轨道面公共路径模型,通过所述目标星的轨道星历设定与所述n个目标星轨道面对应的多个观测量,及设定所述观测卫星的观测轨道面公共路径,以通过多个所述观测量形成所述观测卫星观测轨道面公共路径的目标函数模型式。
[0062]
步骤s103,建立预设迭代算法模型,遍历求解所述目标函数模型式的极值点。
[0063]
步骤s104,设立所述预设迭代算法模型的阈值ε(。
[0064]
步骤s105,当所述目标函数模型式的极值点小于或等于所述阈值ε(时,则停止运算,此时所述目标函数模型式中的所述观测轨道面公共路径为最优观测轨道面公共路径。
[0065]
步骤s106,以所述最优观测轨道面公共路径调整所述观测卫星运行轨道,并更新所述观测卫星的轨道星历。
[0066]
具体的,综合观测卫星观测轨道面公共路径法向控制量相对切向、径向巨大燃料消耗属性。基于多目标星有效观测最优,寻求星群多目标星轨道面最优观测轨道面目标量,提出一次建立、不变优化观测轨道面公共路径设计理念,减少观测卫星法向控制要素控制次数,解决工程实际中观测轨道面巨大燃料消耗的问题。
[0067]
在天球坐标系中,如图3所示,利用观测卫星与目标星双星轨道夹角与交会速度的相关性,发明设计观测卫星多轨道面公共路径目标函数模型。通过最小二乘原理,对星群多目标轨道面观测量遍历迭代求解,最小化夹角目标的平方和满足条件ε(,寻优多轨道面公共路径目标函数最优观测轨道面目标量,解决观测轨道面公共路径控制策略解算问题。
[0068]
如图2、4所示,首先,获取初始化星群簇集包括观测卫星和同步轨道带星群中n个目标星轨道星历或者两行根数;然后,设定预设迭代算法模型的阈值为ε,预设迭代算法可以为牛顿迭代算法,但不做具体限制;接着,启动公共路径解算模型,遍历寻优求解目标函数o(ig,ωg)的最小值;当目标函数模型式的极值点小于或等于阈值ε(时,则停止运算,最后,获取迭代的最终x就是寻优的观测卫星轨道面公共路径。以最终x为观测星群轨道面,一次轨道面调整,建立不变观测轨道面公共路径,以在满足观测目标星最多有效观测的同时,规避了节点单星多批次轨道面控制,极大节约了燃料消耗。另外,本实施例相较于常规赤道面观测路径,解决了大倾角目标星观测筛查观测难的问题,极大提高了目标有效观测覆盖率。
[0069]
本实施方式中,通过采用一次轨道面控制,建立不变观测面公共路径,在满足观测目标最多有效观测的同时,规避了节点单星多批次轨道面控制,极大节约了燃料消耗;另外,相对常规赤道面观测路径,解决了大倾角目标观测筛查观测难的问题,极大提高了目标
有效观测覆盖率。。
[0070]
可选的,在步骤s102建立所述观测卫星的观测轨道面公共路径模型中,还包括:步骤s1021,设多个所述观测量为设观测轨道面公共路径为xg(ig,ωg),其中,i为轨道倾角,ω为升交点赤经;步骤s1022,建立天球坐标系,选择n个所述目标星中的第k个观测目标,将所述观测卫星和所述第k个观测目标在所述天球坐标系中进行投影,设所述第k个观测目标的轨道倾角和升交点赤经为设所述观测卫星轨道面与所述第k个观测目标轨道面间的夹角为步骤s1023,在所述天球坐标系中,根据球面形余弦定理,建立所述观测轨道面公共路径xg(ig,ωg)与所述夹角及所述第k个观测目标的关系式(1):
[0071]
具体的,任意选择观测星群中第k个观测目标星,将观测卫星、目标星轨道在天球中投影,如图3所示,对应为第k个目标星轨道倾角和升交点赤经,为天球坐标系中,观测卫星轨道面与第k个目标星轨道面的夹角,在球面三角形角δabc中:∠abc=π-ig。
[0072]
在天球坐标系中,根据球面形余弦定理,建立观测轨道面公共路径与第k个目标星轨道面夹角与轨道要素关系式(1):
[0073][0074]
按照观测卫星轨道面公共路径与目标星夹角和交会速度的相关性,当目标函数(1)双星夹角越小,观测卫星法向距离满足时,对第k个观测目标有效观测时间最长。
[0075]
可选的,在步骤s102建立所述观测卫星的观测轨道面公共路径模型中,还包括:步骤s1024,通过所述观测轨道面公共路径xg(ig,ωg)与多个所述观测量xm的各目标星形成夹角集群α;步骤s1025,根据所述夹角集群α平方的和建立所述观测卫星观测轨道面公共路径xg的目标函数模型式(2):
[0076][0077]
具体的,采用观测轨道面公共路径xg(ig,ωg)与观测星群xm各目标夹角α平方和的思想,建立多观测量观测公共路径轨道面目标函数模型式(2):
[0078][0079]
式(2)中,为目标星的轨道倾角和升交点赤经,根据同步轨道卫星轨道面空间法向基本保持不变或微小变化工程特性,相对观测卫星较短观测周期,以观测样本为固定观测量。
[0080]
此外,为寻求与星群所有n个目标星轨道面观测量集合最接近的观测轨道面公共路径xg(ig,ωg),可对目标函数模型(2)求解,当该函数达到最小值时,观测卫星与所有目标星的轨道夹角达到最优化,观测卫星与目标星群所有星的可成像时间最长,满足目标星有效成像数量最多。
[0081]
可选的,在步骤s103建立预设迭代算法模型,遍历求解所述目标函数模型式的极值点中还包括,步骤s1031,令o(ig,ωg)的导数等于零,得式(3):其中,所述式(3)的解为所述目标函数模型式(2)的极值点;步骤s1032,利用牛顿迭代法,通过所述观测量xm对所述目标函数模型式(2)遍历求解。
[0082]
具体的,为求目标函数o(ig,ωg)的最小值,令o(ig,ωg)的导数等于零,得式(3),方程组式(3)的解,即为目标函数式(2)的极值点。采用利用牛顿迭代法,以星群所有观测目标星道面要素为观测量,对目标函数模型式遍历求解。
[0083]
可选的,对所述目标函数模型式(2)遍历求解的步骤包括:步骤s10321,令牛顿迭代解算方程式(4)为:x0为x的初值,取值为:步骤s10322,将
所述初值代入式(4)中进行迭代运算,运算式如式(5)
[0084]
步骤s10322,若x
j+1-xj≤ε,则停止迭代计算,则x
j+1
的解为所述目标函数模型式(2)的极值点。
[0085]
具体的,对式(5)迭代运算,直至x
j+1-xj≤ε,则停止迭代计算,在一个示例中,所述ε=10-5
,但不做具体限制;求得x
j+1
的解即为目标函数(2)的极值点。
[0086]
可选的,将所述x
j+1
的解代入所述目标函数模型式的二阶导数式(6)中:若式(6)成立,则当所述观测卫星观测轨道面公共路径为时o达到最小极值点。
[0087]
具体的,将x
j+1
的解中的i
*
和ω
*
进行验算,如果对目标函数模型式二阶导数式(6)成立,则证明观测轨道面公共路径取时o达到最小值。
[0088]
此时求解的就是基于观测目标星数量最大化,考虑轨道控制燃料消耗,通过初始一次倾角控制,形成目标星群观测空间轨道面指向不变公共路径的目标轨道面控制目标。
[0089]
可选的,步骤s102建立所述观测卫星的观测轨道面公共路径模型步骤前包括,步骤s1011,设定所述同步轨道带星群n个目标星所对应的权重值。具体的,该权重值得设置可根据需要进行设置,在此不做限制,权重值的设置可以提升对同步轨道星群中重要目标星的观测时间。
[0090]
可选的,该方法还包括步骤s107,所述观测卫星沿所述最优观测轨道面公共路径对n个所述目标星进行观测,并动态调整该观测卫星的漂移率,以提高对单个目标星的观测成像质量。
[0091]
具体的,以星群观测轨道面公共路径,基于星群各目标星观测可见,动态调整观测卫星漂移率,实现经度节点单目标最佳成像观测。
[0092]
工程应用效果如下:
[0093]
选择同步轨道带内东经50
°
至东经120
°
范围目标星群。观测卫星原轨道:j2000惯性系轨道6根数,如下表1:
[0094]
表1 观测卫星原轨道j2000惯性系轨道6根数
[0095]
日期轨道半长轴偏心率轨道倾角升交点赤经近地点幅角平近点角20180416061000422160450.000244.16970.1927.05276.485911
[0096]
目标星群空间位置:日期2018年10月24日00时00分00秒,格式为星历tle。
[0097]
一、普查观测
[0098]
观测星群量为轨道倾角7
°
以内60个待观测普查目标。将观测卫星和星群tle分别带入式(4),穷举遍历极值解算。求解目标初始一次倾角轨道控制优化目标量控制量:o(i:0.992608,ω:71.25188)。
[0099]
(1)寻优公共路径与赤道面公共路径比较
[0100]
将所求优化观测公共路径、赤道面公共路径、初始轨道公共路径分别与星群各个目标轨道夹角差值,比较分析如图5所示。
[0101]
(2)星群多目标观测成像效果
[0102]
观测卫星漂移率设置为0.5
°
/天,输入条件相同,成像距离150km满足成像条件,分别采用优化观测公共路径、赤道面公共路径、初始轨道公共路径,观测成像效果仿真如图6所示,观测效果统计,如下表2:
[0103]
表2优化轨道、0倾角和原轨道观测路径目标观测统计
[0104][0105]
二、重点目标筛查观测
[0106]
观测星群为东经50
°
至120
°
范围20个重点观测目标,其中大倾角目标较多仿真。解算输出目标初始一次倾角轨道控制优化目标量控制量:o(i:3.832337,ω:63.134861)。
[0107]
(1)公共路径比较仿真
[0108]
将所求优化观测公共路径、赤道面公共路径、初始轨道公共路径分别与星群个目标轨道夹角差值,比较分析如图7所示。
[0109]
(2)观测成像效果
[0110]
观测漂移率设置为0.5
°
/天,输入条件相同,成像距离150km满足成像条件,分别采用优化观测公共路径、赤道面公共路径、初始轨道公共路径,观测成像效果仿真如图8所示,观测效果统计,如下表3:
[0111]
表3优化轨道、0倾角和原轨道观测路径目标观测统计
[0112][0113]
[0114]
三、效果评估
[0115]
(1)星群普查效果
[0116]
相同观测时长条件下,60个目标观测普查时拟合优化公共路径观测效果最优、0倾角公共路经次之,原观测卫星轨道公共路经最差,优化公共路径与0倾角公共路经比较接近。
[0117]
(2)星群筛查效果
[0118]
相同观测时长条件下,20个重点筛选目标观测,优化公共路径观测效果最优、原观测卫星轨道公共路经次之,0倾角公共路经最差,优化公共路径与0原观测卫星轨道公共路经比较接近,说明了观测采用优化公共观测路径成像效果最好。
[0119]
(3)燃料消耗评估
[0120]
对目标普查观测、重点筛选目标成像效果和轨道面建立,燃料消耗分析评估。60个目标观测普查时,在星群观测目标数量最大观测效果条件下,优化公共路径轨道观测数量最多,且轨道控制比0
°
倾角观测路径节约燃料23.8%;重点筛选目标观测成像时,优化轨道控制比0
°
倾角观测路径节约燃料86%。
[0121]
当观测卫星初始轨道不变观测效果与优化观测路径相差较小时,考虑节约燃料,选择初始轨道为公共观测路径。
[0122]
本公开中,通过采用一次轨道面控制,建立不变观测面公共路径,在满足观测目标最多有效观测的同时,规避了节点单星多批次轨道面控制,且已在工程实际中得到了应用,极大节约了燃料消耗;另外,相对常规赤道面观测路径,解决了大倾角目标观测筛查观测难的问题,极大提高了目标有效观测覆盖率。
[0123]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本公开的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。此外,本领域的技术人员可以将本说明书中描述的不同实施例或示例进行接合和组合。
[0124]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1