基于非对称测地线的交互式图像分割方法
1.本发明涉及计算机计算机视觉技术领域,具体涉及一种新的基于非对称测地线的最小路径模型与交互式图像分割方法。
背景技术:
2.最小测地线路径模型(参考文献:cohen,l.d.and kimmel,r.(1997).global minimum for active contour models:a minimal path approach.int.j.comput.vis.,24(1):57
–
78.)由cohen和kimmel首次引入,目的是寻找原始活动轮廓模型中使用的泛函简化版本的全局最小值。本质上,这种简化的活动轮廓能量泛函可以看作是加权曲线长度,可以通过程函偏微分方程求解。基于最小测地线路径模型,在2013年提出了测地线投票算法(参考文献:rouchdy,y.,&cohen,l.d.(2013).geodesic voting for the automatic extraction of tree structures.methods and applications.computer vision and image understanding,117(10),1453
–
1467.)来分割细树形结构,该方法通过一系列密集分布于目标区域内部而稀疏的分布于外部的抽样点,计算大量的测地线,利用这些测地线对图像定义域的每一个点进行投票,从而估算每一个点位于目标区域内部的概率。但在上述测地线投票方法中,测地线的计算方法未考虑图像梯度特征的方向性特征。
技术实现要素:
3.本发明为了克服以上技术的不足,提供了一种可以获得更为准确的图像分割结果的基于非对称测地线的交互式图像分割方法。
4.本发明克服其技术问题所采用的技术方案是:
5.一种基于非对称测地线的交互式图像分割方法,包括如下步骤:
6.a)输入彩色图像i,用i=(i1,i2,i3):表示矢量值彩色图像,i1为彩色图像i的r通道数值,i2为彩色图像i的g通道数值,i3为彩色图像i的b通道数值,为三维实数空间,ω为图像的定义域,在彩色图像i中由使用者手动在目标物体轮廓上标注若干交互点xj,xj∈s,s为点集,j=1,2,...,ns,ns为点集s中交互点的个数,s∈ω;
7.b)采用最远点采样算法得到目标端点集rn∈ω;
8.c)根据彩色图像i,利用图像梯度得到边缘外观特性函数g(nk)和图形梯度张量场构造非对称二次度量函数
9.d)计算得到测地线路径γ
i,j
;
10.e)计算得到测地线路径γ
i,j
经过的图像像素点的投票值ψ;
11.f)根据图像像素点的投票值ψ,完成图像分割。
12.进一步的,步骤b)包括如下步骤:
13.b-1)定义彩色图像i的图像域中像素点为nk,k=1,2,...,t,t为彩色图像i中像素
点的总个数,通过公式计算得到图像域中像素点nk至点集s中交互点xj的距离d(nk,xj),式中c为连接像素点nk与交互点xj两点的曲线上的点,||c'||为c的导数的范数,为各向同性度量函数,exp(.)为以e为底的指数函数,β为标量函数,β>0,为点c处的梯度向量,点c处的梯度向量,为点c的r通道的梯度向量,为点c的g通道的梯度向量,为点c的b通道的梯度向量;
14.b-2)通过公式计算得到彩色图像i中所有像素点至点集s的距离d(nk,s),选取与点集s最大距离值所对应的像素点作为最远点,构造新的点集
15.b-3)通过公式计算得到彩色图像i中所有像素点至点集s1的距离d(nk,s1),选取与点集s1最大距离值所对应的像素点作为最远点,构造新的点集
16.b-4)重复执行步骤b-3)进行迭代计算,直至得到点集其中为与点集s
i-1
的最远像素点,当i为n时,得到目标端点集
17.进一步的,步骤c)包括如下步骤:
18.c-1)利用标准差为σ的高斯核函数g
σ
来计算图像上每一点nk∈ω的雅克比矩阵j(nk),),为梯度算子,j(nk)为2
×
3矩阵,通过公式计算得到图像边缘函数||
·
||为范数,通过公式计算得到边缘外观特性函数g(nk),nm为彩色图像i的图像域中的像素点,为当像素点nm属于图像域
区别于像素点nk的其他像素点时图像边缘函数在图像的定义域ω的上确界,通过公式计算得到图像梯度张量场式中id为2
×
2的单位矩阵,t为转置;
19.c-2)对图像梯度张量场进行特征向量和特征值的分解,得到最小特征值所对应的特征向量所对应的特征向量为二维实数向量,通过公式计算得到张量场式中为向量的张量积,θ(nk)
⊥
为特征向量θ(nk)的垂直向量,α为参数,且α<0,为实数,通过公式计算得到矢量场函数ω(nk),式中为矢量场,m为一个逆时针旋转矩阵,其旋转角度为λ为标量值参数,
20.c-3)通过公式计算得到非对称二次度量函数式中,u为任意向量,《ω(nk),u》
+
=max{0,《ω(x),u》}。
21.进一步的,步骤d)中利用非对称二次度量函数依次采用快速行进算法及反向传播梯度下降法计算得到至交互点xj的测地线路径γ
i,j
。
22.进一步的,步骤e)包括如下步骤:
23.e-1)通过公式计算得到目标端点集rn中的所有端点至交互点xj的投票值φj(nk),式中δ
p
(
·
)为函数,如果测地线路径γ
i,j
经过像素点nk,则返回1,如果测地线路径γ
i,j
不经过像素点nk,则返回0;
24.e-2)连接目标端点集rn至点集s中所有交互点的测地线路径,通过公式计算得到最终的测地线投票值ψ。
25.进一步的,步骤f)包括如下步骤:
26.f-1)根据求得的测地线投票值,选取阈值th,标记测地线投票值大于阈值的像素点,得到初始目标轮廓;
27.f-2)计算彩色图像i上的每一个像素点的梯度方向,在梯度方向连线与邻域的交点使用梯度值进行插值,获得位于当前像素点梯度方向正负方向的两个插值点,将当前像素点的梯度强度与两个插值点的梯度强度进行比较,如果该像素点的梯度强度大于两个插值点的梯度强度,则将该像素点作为边缘点,如果该像素点的梯度强度小于等于两个插值点的梯度强度,则将该像素点的梯度值设置为0,得到非极大值抑制的彩色图像i
′
;
28.f-3)设置高阈值hedge和低阈值ledge,hedge=th
×
max,ledge=tl
×
max,式中th=0.3或th=0.2,tl=0.1,max为非极大值抑制的彩色图像i
′
最大像素值,如果非极大值抑制的彩色图像i
′
中的像素点的像素值大于低阈值ledge并小于高阈值hedge且该像素点与边缘点连通,则将该像素点记为边缘点,各个边缘点组成的图像为边缘图像,完成图像分割。
29.优选的,步骤f-1)中通过公式计算得到阈值th。
30.本发明的有益效果是:通过在基于测地线投票算法中引入最远点采样方法以尽可能在整个图像域中来确定端点,并且在此模型中采用非对称二次型度量函数确定所得端点至交互点的回溯测地线路径,更好的考虑了人工交互信息以及图像边缘的各向异性和非对称特性,从而获得更为准确的图像分割结果。
附图说明
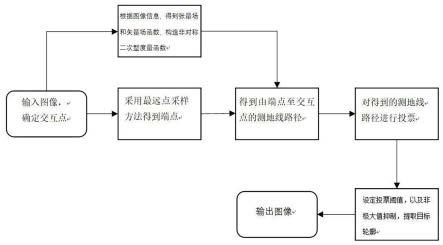
31.图1为本发明的方法流程图。
具体实施方式
32.下面结合附图1对本发明做进一步说明。
33.一种基于非对称测地线的交互式图像分割方法,包括如下步骤:
34.a)输入彩色图像i,用i=(i1,i2,i3):表示矢量值彩色图像,i1为彩色图像i的r通道数值,i2为彩色图像i的g通道数值,i3为彩色图像i的b通道数值,为三维实数空间,ω为图像的定义域,在彩色图像i中由使用者手动在目标物体轮廓上标注若干交互点xj,xj∈s,s为点集,j=1,2,...,ns,ns为点集s中交互点的个数,s∈ω。
35.b)采用最远点采样算法得到目标端点集rn∈ω。
36.c)根据彩色图像i,利用图像梯度得到边缘外观特性函数g(nk)和图形梯度张量场构造非对称二次度量函数
37.d)计算得到测地线路径γ
i,j
。
38.e)计算得到测地线路径γ
i,j
经过的图像像素点的投票值ψ。
39.f)根据图像像素点的投票值ψ,完成图像分割。
40.通过在基于测地线投票算法中引入最远点采样方法以尽可能在整个图像域中来确定端点,并且在此模型中采用非对称二次型度量函数确定所得端点至交互点的回溯测地
线路径,更好的考虑了人工交互信息以及图像边缘的各向异性和非对称特性,从而获得更为准确的图像分割结果。
41.实施例1:
42.步骤b)包括如下步骤:
43.b-1)定义彩色图像i的图像域中像素点为nk,k=1,2,...,t,t为彩色图像i中像素点的总个数,通过公式计算得到图像域中像素点nk至点集s中交互点xj的距离d(nk,xj),式中c为连接像素点nk与交互点xj两点的曲线上的点,||c'||为c的导数的范数,为各向同性度量函数,exp(.)为以e为底的指数函数,β为标量函数,β>0,为点c处的梯度向量,点c处的梯度向量,为点c的r通道的梯度向量,为点c的g通道的梯度向量,为点c的b通道的梯度向量。
44.b-2)通过公式计算得到彩色图像i中所有像素点至点集s的距离d(nk,s),选取与点集s最大距离值所对应的像素点作为最远点,构造新的点集
45.b-3)通过公式计算得到彩色图像i中所有像素点至点集s1的距离d(nk,s1),选取与点集s1最大距离值所对应的像素点作为最远点,构造新的点集
46.b-4)重复执行步骤b-3)进行迭代计算,直至得到点集其中为与点集s
i-1
的最远像素点,当i为n时,得到目标端点集
47.实施例2:
48.步骤c)包括如下步骤:
49.c-1)利用标准差为σ的高斯核函数g
σ
来计算图像上每一点nk∈ω的雅克比矩阵j(nk),),为梯度算子,j(nk)为2
×
3矩阵,通过公式计算得到图像边缘函数
||
·
||为范数,通过公式计算得到边缘外观特性函数g(nk),nm为彩色图像i的图像域中的像素点,为当像素点nm属于图像域区别于像素点nk的其他像素点时图像边缘函数在图像的定义域ω的上确界,通过公式计算得到图像梯度张量场式中id为2
×
2的单位矩阵,t为转置。
50.c-2)对图像梯度张量场进行特征向量和特征值的分解,得到最小特征值所对应的特征向量所对应的特征向量为二维实数向量,通过公式计算得到张量场式中为向量的张量积,θ(nk)
⊥
为特征向量θ(nk)的垂直向量,α为参数,且α<0,为实数,通过公式计算得到矢量场函数ω(nk),式中为矢量场,m为一个逆时针旋转矩阵,其旋转角度为λ为标量值参数,
51.c-3)通过公式计算得到非对称二次度量函数式中,u为任意向量,《ω(nk),u》
+
=max{0,《ω(x),u》}。
52.实施例3:
53.步骤d)中利用非对称二次度量函数依次采用快速行进算法及反向传播梯度下降法计算得到至交互点xj的测地线路径γ
i,j
。
54.实施例4:
55.步骤e)包括如下步骤:
56.e-1)通过公式计算得到目标端点集rn中的所有端点至
交互点xj的投票值φj(nk),式中δ
p
(
·
)为函数,如果测地线路径γ
i,j
经过像素点nk,则返回1,如果测地线路径γ
i,j
不经过像素点nk,则返回0;
57.e-2)连接目标端点集rn至点集s中所有交互点的测地线路径,通过公式计算得到最终的测地线投票值ψ。
58.实施例5:
59.步骤f)包括如下步骤:
60.f-1)根据求得的测地线投票值,选取阈值th,标记测地线投票值大于阈值的像素点,得到初始目标轮廓;
61.f-2)计算彩色图像i上的每一个像素点的梯度方向,在梯度方向连线与邻域的交点使用梯度值进行插值,获得位于当前像素点梯度方向正负方向的两个插值点,将当前像素点的梯度强度与两个插值点的梯度强度进行比较,如果该像素点的梯度强度大于两个插值点的梯度强度,则将该像素点作为边缘点,如果该像素点的梯度强度小于等于两个插值点的梯度强度,则将该像素点的梯度值设置为0,得到非极大值抑制的彩色图像i
′
;
62.f-3)设置高阈值hedge和低阈值ledge,hedge=th
×
max,ledge=tl
×
max,th与tl的比率为2:1或3:1,一般th=0.3或th=0.2,tl=0.1,max为非极大值抑制的彩色图像i
′
最大像素值,图像中的点如果大于高阈值上界则为强边界,如果低于低阈值的像素点必然不是边界,因此如果非极大值抑制的彩色图像i
′
中的像素点的像素值大于低阈值ledge并小于高阈值hedge且该像素点与边缘点连通,则将该像素点记为边缘点,各个边缘点组成的图像为边缘图像,完成图像分割。
63.实施例6:
64.步骤f-1)中通过公式计算得到阈值th。
65.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1