一种三维模型构建数据处理方法及系统与流程
1.本发明涉及模型构建领域,尤其涉及一种三维模型构建数据处理方法及系统。
背景技术:
2.随着计算机视觉技术的快速发展,使得对于3d物体的重建成为可能。通过对物体表面进行多角度拍照,便于获取物体表面丰富的信息,进而利用一系列计算机处理手段,对采集得到的图像进行分割、标定以及重构,实现了基于物体的二维图像的三维模型构建,便于利用物体的三维模型进行数据的应用调整。
3.然而,现有技术中,在对物体二维图像进行处理时,难以对物体表面特征进行细节分割,导致提取到的轮廓点边缘模糊,造成物体三维模型的构建数据不精准的技术问题。
技术实现要素:
4.本技术通过提供一种三维模型构建数据处理方法及系统,解决了在对物体二维图像进行处理时,难以对物体表面特征进行细节分割,导致提取到的轮廓点边缘模糊,造成物体三维模型的构建数据不精准的技术问题。达到了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰,实现物体三维模型的构建数据精准的技术效果。
5.鉴于上述问题,本发明提供了一种三维模型构建数据处理方法及系统。
6.第一方面,本技术提供了一种三维模型构建数据处理方法,所述方法应用于模型构建数据处理系统,且所述模型构建数据处理系统与图像采集装置通信连接,所述方法包括:利用所述图像采集装置,对目标物体进行二维图像采集,用以得到二维图像集合;通过对所述二维图像集合中的各二维图像进行图像特征点筛选,用以得到图像特征点集合,其中,所述图像特征点集合包括必要特征点集合和非必要特征点集合;利用所述必要特征点集合,对所述目标物体的外轮廓范围进行标定,并提取获得边缘轮廓信息;通过对所述边缘轮廓信息上的目标特征点进行三维坐标计算,用以得到所述目标特征点的空间坐标集合;对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果;通过对所述空间拟合结果进行参数的调整优化,使得确定所述目标物体的三维空间模型。
7.另一方面,本技术还提供了一种三维模型构建数据处理系统,所述系统包括:图像采集模块,用于利用图像采集装置,对目标物体进行二维图像采集,用以得到二维图像集合;特征点筛选模块,用于通过对所述二维图像集合中的各二维图像进行图像特征点筛选,用以得到图像特征点集合,其中,所述图像特征点集合包括必要特征点集合和非必要特征点集合;边缘轮廓提取模块,用于利用所述必要特征点集合,对所述目标物体的外轮廓范围进行标定,并提取获得边缘轮廓信息;坐标计算模块,用于通过对所述边缘轮廓信息上的目标特征点进行三维坐标计算,用以得到所述目标特征点的空间坐标集合;空间拟合模块,用于对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果;参数优化模块,用于通过对所述空间拟合结果进行参数的调整优化,使得
确定所述目标物体的三维空间模型。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.通过对物体表面进行二维图像采集,进而对采集得到的图像进行特征点筛选,利用筛选获得的必要特征点集合,对物体外轮廓进行标定,可获取到物体表面边缘轮廓信息,通过对边缘轮廓上的目标特征点进行三维坐标计算,可利用计算得到的空间坐标集合进行数据的空间拟合,用以生成物体的空间拟合结果,同时,对其进行光照参数的调整优化,使得确定目标物体的三维空间模型。达到了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰,实现物体三维模型的构建数据精准的技术效果。
附图说明
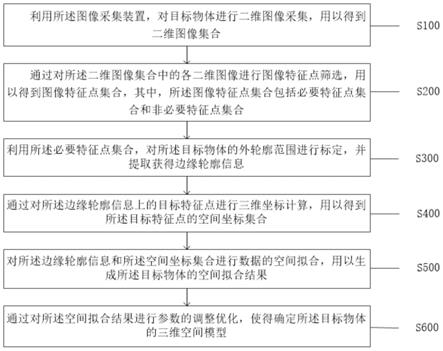
10.图1为本技术一种三维模型构建数据处理方法的流程示意图;
11.图2为本技术一种三维模型构建数据处理方法中对目标物体进行二维图像采集的流程示意图;
12.图3为本技术一种三维模型构建数据处理系统的结构示意图。
具体实施方式
13.由于现有技术中,在对物体二维图像进行处理时,难以对物体表面特征进行细节分割,导致提取到的轮廓点边缘模糊,造成物体三维模型的构建数据不精准的技术问题。
14.针对上述技术问题,本技术提供的技术方案总体思路如下:
15.本技术提供了一种三维模型构建数据处理方法,通过对物体表面进行二维图像采集,进而对采集得到的图像进行特征点筛选,利用筛选获得的必要特征点集合,对物体外轮廓进行标定,可获取到物体表面边缘轮廓信息,通过对边缘轮廓上的目标特征点进行三维坐标计算,可利用计算得到的空间坐标集合进行数据的空间拟合,用以生成物体的空间拟合结果,同时,对其进行光照参数的调整优化,使得确定目标物体的三维空间模型。
16.实施例一
17.如图1所示,本技术提供了一种三维模型构建数据处理方法,所述方法应用于模型构建数据处理系统,且所述模型构建数据处理系统与图像采集装置通信连接,所述方法包括:
18.步骤s100:利用所述图像采集装置,对目标物体进行二维图像采集,用以得到二维图像集合;
19.进一步的,如图2所示,步骤s100包括:
20.步骤s110:确定图像采集基准坐标;
21.步骤s120:基于所述图像采集基准坐标,预设图像采集角度阈值、各角度采集图像坐标;
22.步骤s130:利用所述图像采集角度阈值和所述各角度采集图像坐标,进行多角度的图像采集,且对各采集图像的相机参数进行标定,用以得到各角度标定参数集合;
23.步骤s140:通过对多角度采集图像和所述各角度标定参数集合进行一一对应的参数注释,用以确定所述二维图像集合。
24.具体而言,随着计算机视觉技术的快速发展,使得对于3d物体的重建成为可能。通
过对物体表面进行多角度拍照,便于获取物体表面丰富的信息,进而利用一系列计算机处理手段,对采集得到的图像进行分割、标定以及重构,实现了基于物体的二维图像的三维模型构建,便于利用物体的三维模型进行数据的应用调整。
25.然而,现有技术中,在对物体二维图像进行处理时,难以对物体表面特征进行细节分割,导致提取到的轮廓点边缘模糊,造成物体三维模型的构建数据不精准的技术问题。
26.为了解决现有技术中存在的问题,本技术提出了一种三维模型构建数据处理方法。通过对物体表面进行二维图像采集,进而对采集得到的图像进行特征点筛选,利用筛选获得的必要特征点集合,对物体外轮廓进行标定,可获取到物体表面边缘轮廓信息,通过对边缘轮廓上的目标特征点进行三维坐标计算,可利用计算得到的空间坐标集合进行数据的空间拟合,用以生成物体的空间拟合结果,同时,对其进行光照参数的调整优化,使得确定目标物体的三维空间模型。达到了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰,实现物体三维模型的构建数据精准的技术效果。
27.具体的,所述图像采集装置包括相机等拍照设备,所述目标物体可指代为某一实物,利用相机等拍照设备对该实物进行二维图像采集,所述二维图像集合,即为对该实物进行表面多角度图像采集的集合。其中,在对该实物进行图像采集时,需要确定图像采集基准坐标,所述图像采集基准坐标,可理解为正视该实物时的相机的空间坐标,通过该基准坐标,可预设图像采集角度阈值、各角度采集图像坐标,其中,所述图像采集角度阈值,可理解为环绕该实物360
°
进行多角度采集的角度阈值,所述各角度采集图像坐标,可理解为各个采集角度的相机坐标。
28.进而,利用所述图像采集角度阈值和所述各角度采集图像坐标,进行多角度的图像采集,且对各采集图像的相机参数进行标定,用以得到各角度标定参数集合,其中,所述各角度标定参数集合包括各个图像采集角度的相机参数,具体包括焦距、相主点、相机旋转角度以及平移量等参数,通过对多角度采集图像和所述各角度标定参数集合进行一一对应的参数注释,即将采集得到的各角度相机参数注释到对应角度采集图像,使得确定所述二维图像集合。
29.步骤s200:通过对所述二维图像集合中的各二维图像进行图像特征点筛选,用以得到图像特征点集合,其中,所述图像特征点集合包括必要特征点集合和非必要特征点集合;
30.进一步的,步骤s200包括:
31.步骤s210:通过对所述目标物体进行纹理特征分析,用以确定目标物体外形特征;
32.步骤s220:基于所述目标物体外形特征,确定自定义约束特征点;
33.步骤s230:通过所述自定义约束特征点,对所述各二维图像进行图像特征点筛选。
34.具体而言,在获得上述的二维图像集合之后,可对其进行特征点筛选,用以得到图像特征点集合,其中,所述图像特征点集合包括必要特征点集合和非必要特征点集合,所述必要特征点集合,可理解为该实物表面图像轮廓范围内的特征点集合,所述非必要特征点集合,可理解为该实物表面图像轮廓范围外的特征点集合。具体的,在进行特征点筛选时,需要对该实物进行纹理特征分析,用以确定目标物体外形特征,其中,所述目标物体外形特征,反映了该实物表面的纹理特征走向,通过根据纹理特征走向,可有效确定自定义约束特征点,所述自定义约束特征点,表征了如何对物体表面图像进行特征点的自定义约束,示例
性的,如果该实物表面的纹理特征呈现横向走向,可对其进行横向的约束特征点确定,反之,如果呈现纵向走向,可对其进行纵向的约束特征点确定。进而,利用所述自定义约束特征点,对所述各二维图像进行图像特征点筛选,实现了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰。
35.步骤s300:利用所述必要特征点集合,对所述目标物体的外轮廓范围进行标定,并提取获得边缘轮廓信息;
36.进一步的,步骤s300包括:
37.步骤s310:利用图像分割技术,对所述必要特征点集合和所述非必要特征点集合进行图像边缘界定,使得获得外轮廓边缘;
38.步骤s320:对所述外轮廓边缘的边缘内特征点进行保留、边缘外特征点进行剔除,用以得到所述边缘轮廓信息。
39.具体而言,在获得所述必要特征点集合和所述非必要特征点集合之后,可利用图像分割技术,对所述必要特征点集合和所述非必要特征点集合进行图像边缘界定,使得获得外轮廓边缘,其中,图像分割技术,是指将图像分成若干具有相似性质的区域的过程,从数学角度来看,图像分割是将图像划分成互不相交的区域的过程。本技术中,通过图像分割技术,可将具有相似性质的轮廓边缘以内的特征点、具有不同性质的轮廓边缘以外的特征点进行图像的边缘界定,用以获得外轮廓边缘,所述外轮廓边缘清晰界定了该实物图像的轮廓图。进而,通过对所述外轮廓边缘的边缘内特征点进行保留、边缘外特征点进行剔除,用以得到所述边缘轮廓信息,所述边缘轮廓信息即覆盖了该实物表面的完整轮廓,便于进行后续的坐标计算和空间拟合。
40.步骤s400:通过对所述边缘轮廓信息上的目标特征点进行三维坐标计算,用以得到所述目标特征点的空间坐标集合;
41.进一步的,步骤s400包括:
42.步骤s410:基于所述图像采集基准坐标,对所述各角度采集图像坐标进行坐标差计算,用于确定各角度坐标差集合;
43.步骤s420:通过对所述各角度坐标差集合进行目标检索,用以确定所述目标特征点的目标角度坐标差集合;
44.步骤s430:通过对所述目标角度坐标差集合进行三维空间的坐标计算,使得生成所述空间坐标集合。
45.具体而言,在提取获得所述边缘轮廓信息之后,需要对其上的目标特征点进行三维坐标计算,其中,所述目标特征点可表征为轮廓边缘之上以及轮廓边缘之内的特征点集合。在计算三维坐标时,具体的,可基于所述图像采集基准坐标,对所述各角度采集图像坐标进行坐标差计算,用于确定各角度坐标差集合,其中,所述各角度坐标差集合,反映了各角度坐标与基准坐标的坐标差数据,通过对坐标差数据进行目标特征点的检索,可获得目标角度坐标差集合,其中,所述目标角度坐标差集合,反映了轮廓边缘之上以及轮廓边缘之内的特征点的空间坐标差集合,通过对其进行三维空间的坐标计算,使得生成所述空间坐标集合,所述空间坐标集合,即代表了该实物表面的所有特征点的空间坐标。
46.步骤s500:对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果;
47.步骤s600:通过对所述空间拟合结果进行参数的调整优化,使得确定所述目标物体的三维空间模型。
48.进一步的,步骤s600包括:
49.步骤s610:通过对所述二维图像集合进行光补偿处理,用以获得所述目标物体在不同光照下的光照表面信息、光照背面信息;
50.步骤s620:利用所述光照表面信息,对所述光照背面信息进行凹陷补偿,利用所述光照背面信息,对所述光照表面信息进行高光弱化,用以对所述空间拟合结果进行参数的调整优化。
51.具体而言,在获得所述空间坐标集合之后,需要对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果。其中,空间拟合,它是相对于平面拟合来说的,拟合的意思就是两个要素(单位)进行连接,空间拟合的意思就是它们连接的时候,不是一个平面的,呈空间样式,如空间曲线拟合的时候,拟合线是一条空间曲线,这样的拟合方式就叫做空间拟合。通过利用所述空间坐标集合,对所述边缘轮廓信息进行曲线的空间拟合,所述空间拟合结果即为多种空间拟合曲线集成获得的结果。
52.进而,可对所述空间拟合结果进行参数的调整优化,具体的,可通过对所述二维图像集合进行光补偿处理,用以获得所述目标物体在不同光照下的光照表面信息、光照背面信息。一般的,可对侧方向光源导致的光照不均匀进行光补偿,示例性的,当图像中有n个像素,把所有的像素按灰度值的大小进行统计分布,并且统计所有亮度区间中所对应的像素数量n,和区间内的平均亮度。如果n趋于极大值时,那么把它们的对比度作为“对比白”,让其rgb分量全部设为最满。接着,把其它像素点的rgb值也同样处理,处理后全部大于255的值设为255。以此实现对不均匀地方进行光照补偿;同样的,对光照过强导致出现高光过亮等情况进行光照弱化。即利用所述光照表面信息,对所述光照背面信息进行凹陷补偿,利用所述光照背面信息,对所述光照表面信息进行高光弱化,用以对所述空间拟合结果进行参数的调整优化。使得最终的空间拟合结果保持最优状态。
53.综上所述,本技术所提供的一种三维模型构建数据处理方法及系统具有如下技术效果:
54.通过利用所述图像采集装置,对目标物体进行二维图像采集,用以得到二维图像集合;通过对所述二维图像集合中的各二维图像进行图像特征点筛选,用以得到图像特征点集合;利用所述必要特征点集合,对所述目标物体的外轮廓范围进行标定,并提取获得边缘轮廓信息;通过对所述边缘轮廓信息上的目标特征点进行三维坐标计算,用以得到所述目标特征点的空间坐标集合;对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果;通过对所述空间拟合结果进行参数的调整优化,使得确定所述目标物体的三维空间模型。达到了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰,实现物体三维模型的构建数据精准的技术效果。
55.实施例二
56.基于与前述实施例中一种三维模型构建数据处理方法同样发明构思,本发明还提供了一种三维模型构建数据处理系统,如图3所示,所述系统包括:
57.图像采集模块,用于利用图像采集装置,对目标物体进行二维图像采集,用以得到二维图像集合;
58.特征点筛选模块,用于通过对所述二维图像集合中的各二维图像进行图像特征点筛选,用以得到图像特征点集合,其中,所述图像特征点集合包括必要特征点集合和非必要特征点集合;
59.边缘轮廓提取模块,用于利用所述必要特征点集合,对所述目标物体的外轮廓范围进行标定,并提取获得边缘轮廓信息;
60.坐标计算模块,用于通过对所述边缘轮廓信息上的目标特征点进行三维坐标计算,用以得到所述目标特征点的空间坐标集合;
61.空间拟合模块,用于对所述边缘轮廓信息和所述空间坐标集合进行数据的空间拟合,用以生成所述目标物体的空间拟合结果;
62.参数优化模块,用于通过对所述空间拟合结果进行参数的调整优化,使得确定所述目标物体的三维空间模型。
63.进一步的,所述系统还包括:
64.基准坐标确定单元,用于确定图像采集基准坐标;
65.采集数据预设单元,用于基于所述图像采集基准坐标,预设图像采集角度阈值、各角度采集图像坐标;
66.相机参数标定单元,用于利用所述图像采集角度阈值和所述各角度采集图像坐标,进行多角度的图像采集,且对各采集图像的相机参数进行标定,用以得到各角度标定参数集合;
67.参数注释单元,用于通过对多角度采集图像和所述各角度标定参数集合进行一一对应的参数注释,用以确定所述二维图像集合。
68.进一步的,所述系统还包括:
69.外形特征分析单元,用于通过对所述目标物体进行纹理特征分析,用以确定目标物体外形特征;
70.特征点确定单元,用于基于所述目标物体外形特征,确定自定义约束特征点;
71.特征点筛选单元,用于通过所述自定义约束特征点,对所述各二维图像进行图像特征点筛选。
72.进一步的,所述系统还包括:
73.边缘界定单元,用于利用图像分割技术,对所述必要特征点集合和所述非必要特征点集合进行图像边缘界定,使得获得外轮廓边缘;
74.边缘轮廓确定单元,用于对所述外轮廓边缘的边缘内特征点进行保留、边缘外特征点进行剔除,用以得到所述边缘轮廓信息。
75.进一步的,所述系统还包括:
76.坐标差计算单元,用于基于所述图像采集基准坐标,对所述各角度采集图像坐标进行坐标差计算,用于确定各角度坐标差集合;
77.数据检索单元,用于通过对所述各角度坐标差集合进行目标检索,用以确定所述目标特征点的目标角度坐标差集合;
78.空间坐标计算单元,用于通过对所述目标角度坐标差集合进行三维空间的坐标计算,使得生成所述空间坐标集合。
79.进一步的,所述系统还包括:
80.图像处理单元,用于通过对所述二维图像集合进行光补偿处理,用以获得所述目标物体在不同光照下的光照表面信息、光照背面信息;
81.图像补偿单元,用于利用所述光照表面信息,对所述光照背面信息进行凹陷补偿,利用所述光照背面信息,对所述光照表面信息进行高光弱化,用以对所述空间拟合结果进行参数的调整优化。
82.本技术提供了一种三维模型构建数据处理方法,所述方法包括:通过对物体表面进行二维图像采集,进而对采集得到的图像进行特征点筛选,利用筛选获得的必要特征点集合,对物体外轮廓进行标定,可获取到物体表面边缘轮廓信息,通过对边缘轮廓上的目标特征点进行三维坐标计算,可利用计算得到的空间坐标集合进行数据的空间拟合,用以生成物体的空间拟合结果,同时,对其进行光照参数的调整优化,使得确定目标物体的三维空间模型。解决了对物体二维图像进行处理时,难以对物体表面特征进行细节分割,导致提取到的轮廓点边缘模糊,造成物体三维模型的构建数据不精准的技术问题。达到了对物体表面特征进行细节分割,使得提取到的轮廓点边缘清晰,实现物体三维模型的构建数据精准的技术效果。
83.本说明书和附图仅仅是本技术的示例性说明,如果本发明的修改和变型属于本发明及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1