一种三维影像采集与沉浸式生成方法及系统与流程
1.本发明涉及数字数据处理技术领域,具体涉及一种三维影像采集与沉浸式生成方法及系统。
背景技术:
2.三维影像采集与沉浸式生成简单来说就是对真实的三维立体结构进行三维影像采集,通过采集的数据信息进行建模,构建三维数字化虚拟影像,随着科技的发展,三维数字化虚拟影像的还原度逐渐增强,现代计算机数字技术可以完成信息的采集与生成的步骤,但是,三维立体结构的采集方案与生成方案的匹配度低,在进行建模还原过程,无法保证三维数字化虚拟影像的还原度。
3.现有技术中存在三维影像的采集与生成方案不合理,导致的三维影像信息的还原度低的技术问题。
技术实现要素:
4.本技术通过提供了一种三维影像采集与沉浸式生成方法及系统,解决了三维影像的采集与生成方案不合理,导致的三维影像信息的还原度低的技术问题,达到了基于三维结构的结构特征优化影像的采集方案,通过环境适应性分析对生成的三维模型进行环境渲染,还原三维影像的真实性的技术效果。
5.鉴于上述问题,本技术提供了一种三维影像采集与沉浸式生成方法及系统。
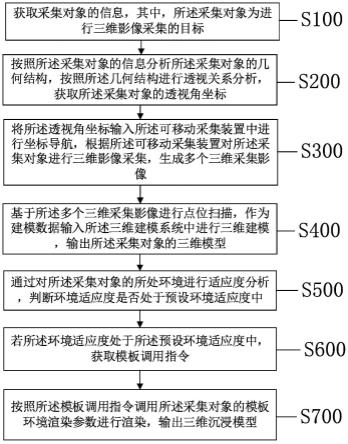
6.第一方面,本技术提供了一种三维影像采集与沉浸式生成方法,其中,所述方法应用于三维影像采集与沉浸式生成系统,所述系统与三维建模系统和可移动采集装置通信连接,所述方法包括:获取采集对象的信息,其中,所述采集对象为进行三维影像采集的目标;按照所述采集对象的信息分析所述采集对象的几何结构,按照所述几何结构进行透视关系分析,获取所述采集对象的透视角坐标;将所述透视角坐标输入所述可移动采集装置中进行坐标导航,根据所述可移动采集装置对所述采集对象进行三维影像采集,生成多个三维采集影像;基于所述多个三维采集影像进行点位扫描,作为建模数据输入所述三维建模系统中进行三维建模,输出所述采集对象的三维模型;通过对所述采集对象的所处环境进行适应度分析,判断环境适应度是否处于预设环境适应度中;若所述环境适应度处于所述预设环境适应度中,获取模板调用指令;按照所述模板调用指令调用所述采集对象的模板环境渲染参数进行渲染,输出三维沉浸模型。
7.第二方面,本技术提供了一种三维影像采集与沉浸式生成系统,其中,所述系统与三维建模系统和可移动采集装置通信连接,所述系统包括:数据获取单元,所述数据获取单元用于获取采集对象的信息,其中,所述采集对象为进行三维影像采集的目标;透视关系分析单元,所述透视关系分析单元用于按照所述采集对象的信息分析所述采集对象的几何结构,按照所述几何结构进行透视关系分析,获取所述采集对象的透视角坐标;坐标导航单元,所述坐标导航单元用于将所述透视角坐标输入所述可移动采集装置中进行坐标导航,
根据所述可移动采集装置对所述采集对象进行三维影像采集,生成多个三维采集影像;三维建模单元,所述三维建模单元用于基于所述多个三维采集影像进行点位扫描,作为建模数据输入所述三维建模系统中进行三维建模,输出所述采集对象的三维模型;适应度分析单元,所述适应度分析单元用于通过对所述采集对象的所处环境进行适应度分析,判断环境适应度是否处于预设环境适应度中;指令调用单元,所述指令调用单元用于若所述环境适应度处于所述预设环境适应度中,获取模板调用指令;渲染与输出单元,所述渲染与输出单元用于按照所述模板调用指令调用所述采集对象的模板环境渲染参数进行渲染,输出三维沉浸模型。
8.本技术中提供的一个或多个技术方案,至少具有如下技术效果或优点:
9.由于采用了获取采集对象的信息,分析采集对象的几何结构,进行透视关系分析,获取透视角坐标,将透视角坐标输入可移动采集装置中进行坐标导航,对采集对象进行三维影像采集,生成多个三维采集影像,进行点位扫描,输入三维建模系统中进行三维建模,输出三维模型,进行适应度分析,判断环境适应度是否处于预设环境适应度中,若处于,获取模板调用指令,调用模板环境渲染参数进行渲染,输出三维沉浸模型。本技术实施例达到了基于三维结构的结构特征优化影像的采集方案,通过环境适应性分析对生成的三维模型进行环境渲染,还原三维影像的真实性的技术效果。
附图说明
10.图1为本技术一种三维影像采集与沉浸式生成方法的流程示意图;
11.图2为本技术一种三维影像采集与沉浸式生成方法的输出三维沉浸模型的流程示意图;
12.图3为本技术一种三维影像采集与沉浸式生成方法的进行模板切换选择输出三维沉浸模型的流程示意图;
13.图4为本技术一种三维影像采集与沉浸式生成系统的结构示意图。
14.附图标记说明:数据获取单元11,透视关系分析单元12,坐标导航单元13,三维建模单元14,适应度分析单元15,指令调用单元16,渲染与输出单元17。
具体实施方式
15.本技术通过提供了一种三维影像采集与沉浸式生成方法及系统,解决了三维影像的采集与生成方案不合理,导致的三维影像信息的还原度低的技术问题,达到了基于三维结构的结构特征优化影像的采集方案,通过环境适应性分析对生成的三维模型进行环境渲染,还原三维影像的真实性的技术效果。
16.实施例一
17.如图1所示,本技术提供了一种三维影像采集与沉浸式生成方法,其中,所述方法应用于三维影像采集与沉浸式生成系统,所述系统与三维建模系统和可移动采集装置通信连接,所述方法包括:
18.s100:获取采集对象的信息,其中,所述采集对象为进行三维影像采集的目标;
19.s200:按照所述采集对象的信息分析所述采集对象的几何结构,按照所述几何结构进行透视关系分析,获取所述采集对象的透视角坐标;
20.具体而言,所述通信连接简单来说就是通过信号的传输交互,在三维影像采集与沉浸式生成系统、三维建模系统和可移动采集装置之间构成通讯,所述采集对象为任意的三维立体结构体,采集对象为三维影像采集与沉浸式生成系统进行三维影像采集的目标,常见的,采集对象可以是任意楼房结构体或其他任意三维立体结构体,按照采集对象的信息分析采集对象的几何结构,示例性的,楼房结构体的结构信息可以是楼房的层数、高度、墙体结构、建筑面积或其他相关数据信息,按照楼房结构体的结构信息对楼房几何结构进行分析,结合几何结构进行透视关系分析,所述透视分析主要针对从三维立体结构体表面观察,无法直接查看到的结构,结合透视关系分析,对三维立体结构体进行结构分析,获取采集对象的透视角坐标,所述透视角坐标为三维坐标数据,示例性的,若为面结构,可以表示为(0~2,2~4,1),该面为一水平面,该点位为空间直角坐标系中,对应为x值=0~2,y值=2~4,z值=1,获取透视角坐标,为后续数据信息处理提供数据基础。
21.进一步具体说明,需要对三维立体结构体进行三维建模,从透视结构来分析,不需要采集所有的影像,只需要在特定的透视角度进行采集,就能够获取用于建模的基本结构,一般的,通过主视图的透视角度进行采集,上述透视角度是进行优选所得,不对透视角度进行限制,实际需要结合三维立体结构体的结构特征进行具体确定。
22.s300:将所述透视角坐标输入所述可移动采集装置中进行坐标导航,根据所述可移动采集装置对所述采集对象进行三维影像采集,生成多个三维采集影像;
23.进一步的,所述将所述透视角坐标输入所述可移动采集装置中进行坐标导航,所述可移动采集装置包括一导航模块,所述步骤s300还包括:
24.s310:根据所述透视角坐标进行坐标集合分析,生成空间移动轨迹;
25.s320:将所述空间移动轨迹输入所述可移动采集装置中,根据所述可移动采集装置中的所述导航模块,对所述可移动采集装置进行空间路线导航定位,获取基于所述透视角坐标对应的各个三维影像,生成所述多个三维采集影像,其中,每个透视角坐标至少采集两组三维影像。
26.具体而言,将透视角坐标输入可移动采集装置中进行坐标导航,所述可移动采集装置为一循轨结构扫描仪器,根据可移动采集装置对采集对象的透视角坐标进行三维影像采集,生成透视角坐标区域位置的多个三维采集影像,为后续进行三维建模提供数据支持。
27.具体而言,根据透视角坐标进行坐标集合分析,确定坐标数据在采集对象几何结构中的位置关系,结合采集对象几何结构对透视角坐标进行坐标集合分析,对所述循轨结构扫描仪器的数据采集顺序进行规划,生成空间移动轨迹,所述空间移动轨迹为循轨结构扫描仪器进行数据采集的轨迹信息,将空间移动轨迹输入可移动采集装置中,可移动采集装置中的导航模块对空间移动轨迹进行数据录入,对可移动采集装置进行空间路线导航定位,导航模块进行基于空间移动轨迹进行轨迹规划,通过轨迹规划进行循轨扫描,采集透视角坐标中的结构信息,通过循轨扫描数据生成所述多个三维采集影像,每个透视角坐标至少采集两组三维影像,防止影像糊了不能用,保证采集到的图像有效性。
28.进一步具体说明,结合采集对象几何结构对透视角坐标进行坐标集合分析,示例性的,纵坐标相同的坐标数据处于同一水平高度,在进行数据采集可以进行整理,确定纵坐标相同的坐标数据是否处于同一平面,若处于同一平面,通过循轨结构扫描仪器对纵坐标相同的坐标数据进行结构扫描信息采集,可以保证所述循轨结构扫描仪器的数据采集效
率。
29.s400:基于所述多个三维采集影像进行点位扫描,作为建模数据输入所述三维建模系统中进行三维建模,输出所述采集对象的三维模型;
30.s500:通过对所述采集对象的所处环境进行适应度分析,判断环境适应度是否处于预设环境适应度中;
31.具体而言,基于透视角坐标对多个三维采集影像进行点位扫描,将所得的数据信息作为建模数据输入三维建模系统中进行三维建模,三维建模系统需要配合三维建模软件,常见的三维软件如3dmax(三维软件名)、pro/e(三维软件名)、solidworks(三维软件名),在建模结束,输出所述采集对象的三维模型,所述三维模型为三维结构,在三维建模系统显示界面进行显示,可以对三维模型进行旋转、拖动、放缩等多项操作,查看采集对象的三维模型,通过对所述采集对象的所处环境进行适应度分析,所述适应度分析可以结合particle swarm optimization(pso,粒子群优化算法)或其他适应度分析算法,对所述采集对象的所处环境进行适应度分析,获取环境适应度,判断所述环境适应度是否处于预设环境适应度中,所述预设环境适应度为一适应度阈值数据,判断环境适应度是否处于预设环境适应度中
32.进一步具体说明,判断环境适应度是否处于预设环境适应度中,确定采集对象与环境变化之间的适应程度,若所述预设环境适应度处于预设环境适应度中,表示采集对象的适应度强;若所述预设环境适应度不处于适应度阈值,表示采集对象的适应度弱,环境对采集数据带来影响不大,采集对象的采集数据稳定,不受采集对象的环境的影响。
33.进一步的,如图2所示,所述判断环境适应度是否处于预设环境适应度中之后,所述步骤s500还包括:
34.s510:若所述环境适应度不处于所述预设环境适应度中,获取环境采集指令;
35.s520:按照所述环境采集指令对所述采集对象的所处环境进行数据采集,获取实时环境数据集;
36.s530:按照所述实时环境数据集,配置渲染空间和渲染属性;
37.s540:按照所述渲染空间和渲染属性,生成实时环境渲染参数进行渲染,输出所述三维沉浸模型。
38.具体而言,若环境适应度不处于预设环境适应度中,也就是所述预设环境适应度超出适应度阈值限定,采集对象的适应度弱,获取环境采集指令,所述环境采集指令控制通过可移动采集装置对获取环境信息,按照环境采集指令对采集对象的所处环境进行数据采集,结合环境数据的数据类型,获取实时环境数据集,按照实时环境数据集,配置渲染空间和渲染属性,按照渲染空间和渲染属性,生成实时环境渲染参数进行渲染,输入三维建模系统,对采集对象的进行环境进行仿真,输出三维沉浸模型。
39.进一步具体说明,带入实际的场景中进行理解,房屋与环境的适应度不在预设环境适应度中,房屋与环境的适应度弱,房屋对应的采集所得的数据信息中不包括环境场景对应的环境变量,需要对环境信息进行采集,然后再配置渲染空间,生成三维沉浸模型。
40.s600:若所述环境适应度处于所述预设环境适应度中,获取模板调用指令;
41.s700:按照所述模板调用指令调用所述采集对象的模板环境渲染参数进行渲染,输出三维沉浸模型。
42.具体而言,若所述环境适应度处于所述预设环境适应度中,表示环境适应度强,环境渲染可以采取将该对象嵌入环境模板中直接进行渲染,确定环境场景数据信息对采集对象带来的环境变量,获取模板调用指令,所述模板环境渲染参数是三维影像采集与沉浸式生成系统中的通过大数据进行整理分析所得,通过所述模板调用指令调用所述采集对象的对应的模板环境渲染参数进行渲染,生成三维沉浸模型,结合环境场景类型数据,结合采集对象的场景适应性,对采集对象的三维模型进行场景渲染,保证了三维沉浸模型的可靠性。
43.进一步具体说明,带入实际的场景中进行理解,树木会因环境变化相应变化,如有风的环境下,需要确定风的方向与风力大小,树木的采集数据中包括了风的方向与风力大小对应的环境变量信息,将风的方向与风力大小输入三维影像采集与沉浸式生成系统,所述三维影像采集与沉浸式生成系统中包括多个环境渲染模板,通过环境变量信息,确定树木的环境渲染模板,通过模板调用指令调用环境渲染模板参数,对树木的模型进行配置渲染,模拟实际的场景对三维结构体进行分析。
44.进一步的,如图3所示,所述步骤s700包括:
45.s710:对所述采集对象的所处环境进行分析,获取环境属性特征;
46.s720:以所述环境属性特征为模板调用目标,从模板调用库中进行模板环境调用,输出模板环境;
47.s730:根据所述模板环境对所述采集对象进行场景渲染,输出所述模板环境渲染参数;
48.s740:根据所述模板环境渲染参数,进行模板切换选择输出所述三维沉浸模型。
49.具体而言,对采集对象的所处环境进行分析,所述特征分析的方法可以包括k-medoids算法、bp反向传播等特征分析算法,获取环境属性特征;以环境属性特征为模板调用目标,基于大数据,构建所述模板调用库,从模板调用库中进行模板环境调用,输出模板环境,根据模板环境对采集对象进行场景渲染,输出模板环境渲染参数,确定模板环境对采集对象对应的模板环境渲染参数,进行模板切换选择,按照原本的场景特征,选择对应的模板场景,若模板场景大于等于2,可以进行切换自主选择渲染效果,输出三维沉浸模型,实现环境场景的自主切换。
50.进一步的,所述方法还包括:
51.s610:通过对所述采集对象的三维模型进行灰度处理,输出灰度转化模型;
52.s620:将所述灰度转化模型按照灰度阈值进行表面纹理瑕疵点提取和几何边框瑕疵点提取,输出瑕疵点检测结果;
53.s630:基于所述瑕疵点检测结果对所述三维模型进行瑕疵点处理,输出瑕疵点消除后的所述三维模型,其中,所述瑕疵点处理包括纹理瑕疵处理和边框瑕疵处理。
54.具体而言,对于表面由于纹理扭曲或者像素点不准确,造成的成像模型精细度不够,采取灰度处理,通过三维建模系统对采集对象的三维模型进行灰度处理,输出灰度转化模型,按照灰度阈值对灰度转化模型的表面纹理瑕疵点和几何边框瑕疵点提取,所述提取信息包括但不限于瑕疵点位置信息与瑕疵点数据信息,输出瑕疵点检测结果,基于瑕疵点检测结果对三维模型进行瑕疵点处理,瑕疵点处理包括纹理瑕疵处理和边框瑕疵处理,处理一般是通过图形对称或是周围的像素点对瑕疵点进行修正,输出瑕疵点消除后的三维模型,避免因数据传输不稳定或数据采集过程的环境干扰导致的三维模型数据可靠度有损,
提高三维模型数据信息的有效性。
55.进一步的,所述基于所述瑕疵点检测结果对所述三维模型进行瑕疵点处理,所述步骤s630还包括:
56.s631:通过对所述表面纹理瑕疵点所处的空间进行定位,获取存在纹理瑕疵的空间定位坐标;
57.s632:通过对所述表面纹理瑕疵点的邻域表面纹理进行提取,输出邻域纹理特征;
58.s633:以所述邻域纹理特征作为目标纹理,对存在纹理瑕疵的所述空间定位坐标进行纹理修复遍历,输出多个纹理瑕疵修复结果;
59.s634:基于所述多个纹理瑕疵修复结果,输出表面纹理瑕疵点消除后的所述三维模型。
60.具体而言,确定表面纹理瑕疵点对应的空间坐标信息,定位该空间坐标信息,获取存在纹理瑕疵的空间定位坐标,提取与表面纹理瑕疵点的空间坐标信息临近的像素点,忽略所述表面纹理瑕疵点进行像素点的拼接,获取邻域表面纹理,输出邻域纹理特征,以邻域纹理特征作为目标纹理,对存在纹理瑕疵的空间定位坐标进行纹理修复遍历,重复上述步骤,输出多个纹理瑕疵修复结果,通过多个瑕疵点检测结果对所述三维模型进行瑕疵点处理,输出表面纹理瑕疵点消除后的三维模型,实现三维模型的表面纹理瑕疵点的修复。
61.进一步的,所述基于所述瑕疵点检测结果对所述三维模型进行瑕疵点处理,所述步骤s630还包括:
62.s635:通过对所述几何边框瑕疵点所处的空间进行定位,获取边框瑕疵的空间定位坐标;
63.s634:通过对所述几何边框瑕疵点对应所处的边框进行成线离散性分析,获取待修复边框瑕疵点,其中,所述待修复边框瑕疵点为所处边框成线的所有点中垂直距离大于预设垂直距离的点;
64.s637:根据所述待修复边框瑕疵点,对存在边框瑕疵的空间定位坐标进行边框瑕疵修复,输出几何边框瑕疵点消除后的所述三维模型。
65.具体而言,瑕疵点出现在边框位置,区别的,无法通过空间坐标信息临近的像素点进行修复,通过临近的像素点进行修复会使得几何边框模糊,导致三维模型的边框轮廓不清晰,需要对几何边框瑕疵点所处的空间进行定位,获取边框瑕疵的空间定位坐标,对几何边框瑕疵点对应所处的边框进行成线离散性分析,一般的,几何边框的轮廓为线性,待修复边框瑕疵点为所处边框成线的所有点中垂直距离大于预设垂直距离的点,获取待修复边框瑕疵点,根据待修复边框瑕疵点,对存在边框瑕疵的空间定位坐标进行边框瑕疵修复,避免修复后的几何边框线因边框瑕疵修复导致的几何边框模糊,输出几何边框瑕疵点消除后的三维模型,实现三维模型的几何边框瑕疵点的修复。
66.综上所述,本技术所提供的一种三维影像采集与沉浸式生成方法及系统具有如下技术效果:
67.由于采用了获取采集对象的信息,分析采集对象的几何结构,进行透视关系分析,获取透视角坐标,将透视角坐标输入可移动采集装置中进行坐标导航,对采集对象进行三维影像采集,生成多个三维采集影像,进行点位扫描,输入三维建模系统中进行三维建模,输出三维模型,进行适应度分析,判断环境适应度是否处于预设环境适应度中,若处于,获
取模板调用指令,调用模板环境渲染参数进行渲染,输出三维沉浸模型,本技术通过提供了一种三维影像采集与沉浸式生成方法及系统,达到了基于三维结构的结构特征优化影像的采集方案,通过环境适应性分析对生成的三维模型进行环境渲染,还原三维影像的真实性的技术效果。
68.由于采用了对采集对象的所处环境进行分析,获取环境属性特征,以环境属性特征为模板调用目标,从模板调用库中进行模板环境调用,输出模板环境,进行场景渲染,输出模板环境渲染参数,进行模板切换选择输出三维沉浸模型,实现环境场景的自主切换。
69.实施例二
70.基于与前述实施例中一种三维影像采集与沉浸式生成方法相同的发明构思,如图4所示,本技术提供了一种三维影像采集与沉浸式生成系统,其中,所述系统与三维建模系统和可移动采集装置通信连接,所述系统包括:
71.数据获取单元11,所述数据获取单元11用于获取采集对象的信息,其中,所述采集对象为进行三维影像采集的目标;
72.透视关系分析单元12,所述透视关系分析单元12用于按照所述采集对象的信息分析所述采集对象的几何结构,按照所述几何结构进行透视关系分析,获取所述采集对象的透视角坐标;
73.坐标导航单元13,所述坐标导航单元13用于将所述透视角坐标输入所述可移动采集装置中进行坐标导航,根据所述可移动采集装置对所述采集对象进行三维影像采集,生成多个三维采集影像;
74.三维建模单元14,所述三维建模单元14用于基于所述多个三维采集影像进行点位扫描,作为建模数据输入所述三维建模系统中进行三维建模,输出所述采集对象的三维模型;
75.适应度分析单元15,所述适应度分析单元15用于通过对所述采集对象的所处环境进行适应度分析,判断环境适应度是否处于预设环境适应度中;
76.指令调用单元16,所述指令调用单元16用于若所述环境适应度处于所述预设环境适应度中,获取模板调用指令;
77.渲染与输出单元17,所述渲染与输出单元17用于按照所述模板调用指令调用所述采集对象的模板环境渲染参数进行渲染,输出三维沉浸模型。
78.进一步的,所述系统包括:
79.适应度判断单元,所述适应度判断单元用于若所述环境适应度不处于所述预设环境适应度中,获取环境采集指令;
80.环境数据采集单元,所述环境数据采集单元用于按照所述环境采集指令对所述采集对象的所处环境进行数据采集,获取实时环境数据集;
81.数据配置单元,所述数据配置单元用于按照所述实时环境数据集,配置渲染空间和渲染属性;
82.参数生成单元,所述参数生成单元用于按照所述渲染空间和渲染属性,生成实时环境渲染参数进行渲染,输出所述三维沉浸模型。
83.进一步的,所述系统包括:
84.灰度转化单元,所述灰度转化单元用于通过对所述采集对象的三维模型进行灰度
处理,输出灰度转化模型;
85.瑕疵点提取单元,所述瑕疵点提取单元用于将所述灰度转化模型按照灰度阈值进行表面纹理瑕疵点提取和几何边框瑕疵点提取,输出瑕疵点检测结果;
86.瑕疵点消除单元,所述瑕疵点消除单元用于基于所述瑕疵点检测结果对所述三维模型进行瑕疵点处理,输出瑕疵点消除后的所述三维模型,其中,所述瑕疵点处理包括纹理瑕疵处理和边框瑕疵处理。
87.进一步的,所述系统包括:
88.瑕疵点空间定位单元,所述瑕疵点空间定位单元用于通过对所述表面纹理瑕疵点所处的空间进行定位,获取存在纹理瑕疵的空间定位坐标;
89.纹理提取单元,所述纹理提取单元用于通过对所述表面纹理瑕疵点的邻域表面纹理进行提取,输出邻域纹理特征;
90.纹理修复单元,所述纹理修复单元用于以所述邻域纹理特征作为目标纹理,对存在纹理瑕疵的所述空间定位坐标进行纹理修复遍历,输出多个纹理瑕疵修复结果;
91.瑕疵修复单元,所述瑕疵修复单元用于基于所述多个纹理瑕疵修复结果,输出表面纹理瑕疵点消除后的所述三维模型。
92.进一步的,所述系统包括:
93.边框瑕疵定位单元,所述边框瑕疵定位单元用于通过对所述几何边框瑕疵点所处的空间进行定位,获取边框瑕疵的空间定位坐标;
94.离散分析单元,所述离散分析单元用于通过对所述几何边框瑕疵点对应所处的边框进行成线离散性分析,获取待修复边框瑕疵点,其中,所述待修复边框瑕疵点为所处边框成线的所有点中垂直距离大于预设垂直距离的点;
95.边框瑕疵修复单元,所述边框瑕疵修复单元用于根据所述待修复边框瑕疵点,对存在边框瑕疵的空间定位坐标进行边框瑕疵修复,输出几何边框瑕疵点消除后的所述三维模型。
96.进一步的,所述系统包括:
97.环境特征分析单元,所述环境特征分析单元用于通过对所述采集对象的所处环境进行分析,获取环境属性特征;
98.模板调用单元,所述模板调用单元用于以所述环境属性特征为模板调用目标,从模板调用库中进行模板环境调用,输出模板环境;
99.场景渲染单元,所述场景渲染单元用于根据所述模板环境对所述采集对象进行场景渲染,输出所述模板环境渲染参数;
100.模板切换选择单元,所述模板切换选择单元用于根据所述模板环境渲染参数,进行模板切换选择输出所述三维沉浸模型。
101.进一步的,所述系统包括:
102.坐标集合分析单元,所述坐标集合分析单元用于根据所述透视角坐标进行坐标集合分析,生成空间移动轨迹;
103.空间路线导航单元,所述空间路线导航单元用于将所述空间移动轨迹输入所述可移动采集装置中,根据所述可移动采集装置中的所述导航模块,对所述可移动采集装置进行空间路线导航定位,获取基于所述透视角坐标对应的各个三维影像,生成所述多个三维
采集影像,其中,每个透视角坐标至少采集两组三维影像。
104.本说明书和附图仅仅是本技术的示例性说明,在不脱离本技术的精神和范围的情况下,可对其进行各种修改和组合。本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术意图包括这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1