一种基于机器视觉的灌装桶面异常状态实时监测方法与流程
1.本发明涉及灌装技术领域,特别是涉及一种基于机器视觉的灌装桶面异常状态实时监测方法。
背景技术:
2.现在的灌装机一般只对灌装过程中桶面的异常状态(例如发生冒料以及桶面存在异物等)的发生做了预防,并没有对桶面异常事件本身做监控。
3.目前市面上的灌装机在灌装过程中,一般会通过称重保护、灌装超时等方式来预防冒料的发生,但是由于操作失误导致称台数据失效,或者人为设置补料灌装量超出容器剩余体积时,仍然无法避免冒料事件的发生。只能依靠车间的操作人员来发现,然后急停设备,防止损害的进一步发生。但是在灌装过程中,料枪的灌装是有一定速度的,冒料以及其他异常可能在一瞬间就发生了,仅靠人的肉眼是没有办法及时观测到冒料及其他异常的发生、并停止机器灌装的,如果灌装的是有害物料,冒料会对车间工作人员的身体健康造成伤害,同时也会污染环境,如果桶面存在其他异常,可能会影响灌装准确性甚至损坏设备。
技术实现要素:
4.本发明的目的是提出一种基于机器视觉的灌装桶面异常状态实时监测方法,能够在灌装机灌装的过程中实时监控灌装情况,如果有异常现象发生,控制系统可以自动停止灌装操作,从而减少灌装过程中因发生异常而造成的损失,避免异常事故发生。
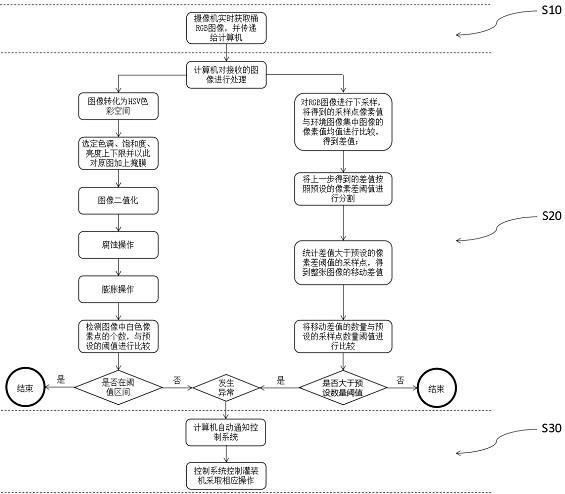
5.为实现上述目的,本发明提供如下技术方案:一种基于机器视觉的灌装桶面异常状态实时监测方法,包括:s10,通过设置在灌装设备上的摄像机实时获取桶rgb图像,并将获取的图像传递给计算机;s20,计算机通过预设的程序对接收的图像进行处理,并判断是否发生异常;s30,若判断结果为发生异常,计算机自动通知控制系统,控制系统控制灌装机采取相应操作。
6.进一步地,所述s20中的预设程序采用两种方法同时对是否发生异常进行判断,只要其中一种方法的判断结果为发生异常,则认为发生异常。
7.进一步地,所述s20中预设程序的一种判断方法为:通过计算机将接收到的实时获取的rgb图像转化为hsv空间图像;通过计算机对上一步得到的hsv空间图像进行掩膜覆盖;通过计算机对上一步得到的图像进行二值化,得到一个能表现出反射光线强弱分布的图像;通过计算机对上一步得到的图像进行腐蚀操作,处理掉光线较弱的区域;通过计算机对上一步得到的图像进行膨胀操作,增强光线较强的区域,弱化光线较弱的区域;通过计算机检测图像中白色像素点的个数,与预设的阈值区间进行比较,当白色像素点个数不在预设的阈值区间时,认为发生了异常。
8.进一步地,通过选定色调、饱和度、亮度的上下限对原图进行掩膜覆盖。
9.进一步地,通过更改所述阈值可以适应不同环境桶面的异常进行监测。
10.进一步地,所述s20中预设程序的另一种判断方法:通过计算机对接收到的实时
rgb图像进行下采样,将得到的采样点像素值与环境图像集中图像的像素值均值进行比较,得到差值;通过计算机将上一步得到的差值按照预设的像素差阈值进行分割,用来减少噪音的影响;通过计算机统计差值大于预设的像素差阈值的采样点,得到整张图像的移动差值,如果移动差值的数量大于预设的采样点数量阈值的时候,认为发生了异常。
11.进一步地,通过计算机将移动差值用颜色标注进行标注,可以直观观察桶面异常情况。
12.进一步地,通过更改所述像素差阈值和采样点数量阈值可以对不同环境桶面的异常进行监测。
13.与现有技术相比本发明的有益效果是:本发明提供的一种基于机器视觉的灌装桶面异常状态实时监测方法,算法简单,检测速度快,可以对桶面状态进行实时监测,在发生异常的第一时间通知控制系统,控制系统停止灌装并发出警报,以达到保护人员安全、减少物料损失、减轻设备损坏的目的。
14.使用两种机器视觉方法同时判断异常现象的发生,增加异常监控结果的可靠性,同时异常结果可视化,便于直观观察。采用帧差法通过对视频图像序列中的相邻两帧作差分运算来获取运动目标轮廓的方法,可以很好地适用于存在多个运动目标和摄像机移动的情况。
附图说明
15.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1是本发明的一种基于机器视觉的灌装桶面异常状态实时监测方法流程图。
17.图2是本发明判断方法一的掩膜值设置ui界面示意图。
18.图3是本发明判断方法二的参数设置示意图。
具体实施方式
19.为了使本技术领域的人员更好地理解本发明中的技术方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
20.图1示出了一种基于机器视觉的灌装桶面异常状态实时监测方法的流程图。
21.s10,通过设置在灌装设备上的摄像机实时获取桶rgb图像,并将获取的图像传递给计算机。
22.s20,计算机通过预设的程序对接收的图像进行处理,并判断是否发生异常。
23.为了增加冒料监控结果的可靠性,所述s20中的预设程序采用两种方法同时对是否发生异常进行判断,只要其中一种方法的判断结果为发生异常,则认为发生异常。
24.本实施例中优选的,所述s20中预设程序的判断方法一:灌装过程中如果桶面有液
体或异物的情况下,照射到桶面上的光线会被散射,导致桶面的反光程度会比正常桶面反光程度弱一些,本发明利用这个原理提出了一种冒料监控方法。
25.通过计算机将接收到的实时获取的rgb图像转化为hsv空间图像。
26.通过计算机对上一步得到的hsv空间图像进行掩膜覆盖;hsv空间的图像由色调h,饱和度s和明度v组成,可以通过如图2所示的可视化界面通过选定色调、饱和度、亮度的上下限对原图进行掩膜覆盖。
27.首先可以通过调整hsv控件的最小值l(h,s,v)和最大值u(h,s,v)来确定来设置hsv掩膜,本实施例中将lh、ls、lv均设置为0,将uh、us、uv分别设置为180、255、255;然后可以通过调整erode的值来设置腐蚀操作窗口的大小,本实施例中erode值设置为1;最后通过调整dlate的值来确定膨胀操作的窗口大小,本实施例中dlate值设置为1。不同的灌装桶型,不同的设备可以根据实际灌装环境来设置不同掩膜值,如果灌装环境有变化,还可以使用图2的界面来修改已经设置好的掩膜值。
28.通过计算机对上一步得到的图像进行二值化,得到一个能表现出反射光线强弱分布的图像。
29.通过计算机对上一步得到的图像进行腐蚀操作,处理掉光线较弱的区域。
30.通过计算机对上一步得到的图像进行膨胀操作,增强光线较强的区域,弱化光线较弱的区域。
31.通过计算机检测图像中白色像素点的个数,与预设的阈值区间进行比较,当白色像素点个数不在预设的阈值区间时,认为发生了异常。经过hsv掩膜和二值化处理以后,正常图像和冒料图像的差异非常明显,正常图像上的白色像素点比较多,而冒料图像上的白色像素点比较少,再经过膨胀腐蚀运算以后,正常图像和冒料图像间的差异会变得更加明显,冒料图像上的白色像素的个数要远远小于正常图像上的白色像素的个数,因此只要选择一个合适的阈值,就可以把冒料图像和正常图像区分开,还可以通过更改所述阈值可以适应不同环境桶面的异常进行监测。不同图像的特征不一样,所以可以根据灌装桶型的不同对不同桶型设置不同的阈值,例如灌装ibc桶的时候,阈值区间可以设置为19000—20000,灌装铁桶的时候,阈值区间可以设置为49000—50000。
32.本实施例中优选的,所述s20中预设程序的另一种判断方法是基于帧差法的移动侦查对异常事件进行监控。通过对视频图像序列中的相邻两帧作差分运算来获取运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动的时候,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,判断它是否大于阈值来分析视频或图像序列的运动特征,从而确定图像序列中有无物体运动。
33.灌装机正常灌装时图像画面相对静止,两帧图像间的差值较小,但是当发生冒料或其他异常情况的时候,前后两帧图像的像素值会产生较大的差别,并且变化前后的差值会相差百倍以上,因此我们把这个差值作为判断冒料或其他异常情况发生的依据。
34.具体的:首先把最近采集的几帧图像保存到图像池中,用这些图像制作环境图像集。
35.如图3所示,通过计算机对接收到的实时rgb图像进行下采样,下采样倍数为10,将得到的采样点像素值与环境图像集中图像的像素值均值进行比较,得到差值。
36.通过计算机将上一步得到的差值按照预设的像素差阈值进行分割,用来减少噪音的影响。
37.通过计算机统计差值大于预设的像素差阈值的采样点,得到整张图像的移动差值,如果移动差值的数量大于预设的采样点数量阈值的时候,认为发生了异常。本实施例中预设的采样点数量阈值设置为10000,通过更改所述像素差阈值和采样点数量阈值可以对不同环境桶面的异常进行监测。
38.为了使操作人员能够直观观察,本实施例进一步地通过计算机将移动差值用颜色标注进行标注,并在图像中显示出来,操作人员可以直观地看到出现异常状态的区域。
39.s30,若判断结果为发生异常,计算机自动通知控制系统,控制系统控制灌装机采取相应停机操作并发出警报提示操作人员,以达到保护人员安全、减少物料损失、减轻设备损坏的目的。
40.以上对本发明所提供的一种基于机器视觉的灌装桶面异常状态实时监测方法进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1