一种PAD导光板黑点缺陷的视觉检测方法
一种pad导光板黑点缺陷的视觉检测方法
技术领域
1.本发明涉及导光板生产和图像识别领域,具体是一种pad导光板黑点缺陷的视觉检测方法。
背景技术:
2.导光板(light guide plate,lgp),是采用网版印刷、激光雕刻等技术在亚克力板上制作导光点来得到的。作为一种具备高反射率的高科技光学材料,导光板具有轻薄高亮、环保耐用、发光均匀等优异特性,因此在液晶面板、广告灯、手机、pad模组等场合有广泛应用。
3.便携式android设备(pad)导光板的熔料在塑化过程中,有时会因为装熔料的腔体温度过高而发生碳化,从而产生黑点缺陷。目前国内导光板厂家在检测黑点缺陷时,主要雇佣大量年轻员工,在专用的灯光照明下,进行导光板缺陷的多角度排查,将有缺陷的导光板剔除出来。这不仅要消耗大量人力资源,还对检测人员的视力和颈椎造成不同程度的损害。从检测效果来看,人工检测主观因素过高,个体间检测差异大,检测速度慢,而且无法实现7
×
24小时连续稳定工作。
技术实现要素:
4.本发明要解决的技术问题是提供一种pad导光板黑点缺陷的视觉检测方法,用以对生产完成的导光板进行黑点的在线检测。
5.为了解决上述技术问题,本发明提供一种pad导光板黑点缺陷的视觉检测方法,包括:采集导光板的图像并发送至上位机进行进一步预处理,包括依次进行高斯滤波和分段线性变换,然后采用harris角点检测算法对预处理后的图像进行角点检测,对检出的角点进行黑点检测判断是否为黑点缺陷,并在上位机中对黑点进行标圈显示。
6.作为本发明的一种pad导光板黑点缺陷的视觉检测方法的改进:
7.所述高斯滤波为对图像邻域内像素进行平滑时,邻域内不同位置的像素被赋予不同的权值,离模板中心近的像素权值越大,离模板中心远的像素权值越小:
[0008][0009][0010]
其中,f(x,y)是变换前的像素值,g(x,y)是变换后的像素值,w(s,t)是权值。
[0011]
作为本发明的一种pad导光板黑点缺陷的视觉检测方法的进一步改进:
[0012]
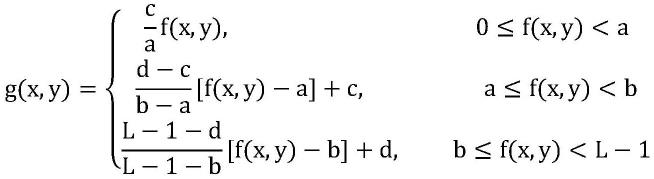
所述分段线性变换为突出感兴趣的灰度区间,相对抑制那些不感兴趣的灰度区间:
[0013][0014]
其中,f(x,y)是变换前的像素值,g(x,y)是变换后的像素值,l-1是最大的像素值。
[0015]
作为本发明的一种pad导光板黑点缺陷的视觉检测方法的进一步改进:
[0016]
所述harris角点检测算法为利用一个局部的窗口在图像的各个方向上进行移动,通过计算灰度变化值来判断该窗口是否位于角点上,r》0时,窗口中心点为角点位置,角点坐标q为窗口中心点坐标(x,y):
[0017][0018]
式中,r为角点响应函数值,λ1和λ2为矩阵m的特征值,detm表示行列式m的值,tracem表示矩阵m的迹,a为经验常数,一般取值范围在0.04~0.06之间;
[0019]
detm=λ1λ2=ab-c2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(12)
[0020]
tracem=λ1+λ2=a+b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(13)
[0021][0022][0023][0024][0025]
w是以(x,y)为中心的窗口,w(x,y)为窗口内的窗口函数,i
x
和iy为i(x,y)分别在x方向和y方向的偏导数:
[0026][0027][0028]
作为本发明的一种pad导光板黑点缺陷的视觉检测方法的进一步改进:
[0029]
所述黑点检测的过程为:
[0030]
计算距离所述角点坐标q的切比雪夫距离为5以内的区域灰度均值mean1,再计算所述角点坐标q的切比雪夫距离为9到11的区域灰度均值mean2,然后判断两个区域灰度均值的差值是否大于事先设定的阈值(threshold),mean2-mean1》threshold时的角点为黑点;
[0031]
切比雪夫距离的公式为:
[0032]d1,2
=max(|x
1-x2|,|y
1-y2|)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(15)
[0033]
其中,x1,x2,y1,y2为点的坐标。
[0034]
作为本发明的一种pad导光板黑点缺陷的视觉检测方法的进一步改进:
[0035]
对所述黑点进行标圈为以黑点坐标为圆心,半径为10像素画圆。
[0036]
本发明的有益效果主要体现在:
[0037]
本发明改进了现有的阈值分割算法只用单一阈值作为划分、容易受成像稳定性影响发生漏检的缺陷,通过harris角点检测算法并经过黑点检测的二次确认,提高了检测黑点的准确度。本发明改进了传统harris角点检测算法只是单纯的利用了角点检测算法造成误检概率大的缺陷;在harris角点检测算法上新增了比较角点不同距离区域的灰度均值,从而判断角点是否是黑点,大大提高了检测黑点的准确度。
附图说明
[0038]
下面结合附图对本发明的具体实施方式作进一步详细说明。
[0039]
图1为本发明的一种pad导光板黑点缺陷的视觉检测方法的过程示意图;
[0040]
图2为含有黑点缺陷的导光板图像;
[0041]
图3为导光板的含黑点缺陷局部图像预处理前后的对比图(左图为原图像,中间为经过高斯滤波之后的图像,右图为经过分段线性变换之后的图像);
[0042]
图4为harris角点检测算法示意图;
[0043]
图5为角点响应函数r值与特征值λ1、λ2的关系示意图;
[0044]
图6为本发明的黑点检测算法的示意图;
[0045]
图7为黑点缺陷检测的效果示意图;
[0046]
图8为本发明的黑点检测的过程示意图;
[0047]
图9为分段线性变换的效果示意图。
具体实施方式
[0048]
下面结合具体实施例对本发明进行进一步描述,但本发明的保护范围并不仅限于此:
[0049]
实施例1、一种pad导光板黑点缺陷的视觉检测方法,如图1所示,具体过程包括:
[0050]
1、图像采集及预处理
[0051]
在工业现场的导光板生产线末端,采用使用面阵相机采集生产完成的导光板图片,并发送至上位机进行进一步预处理。如图2所示,展示了面阵相机的单次成像图,其中包含了需要检测的黑点缺陷。
[0052]
图像预处理的方式主要有两个:先对所获取的pad导光板原图像进行高斯滤波,使图像背景中的杂点被模糊化了;然后再使用分段线性变换,使图像的对比度有了显著提升,这两步简化了后续检测算法的设计。经过预处理的图像如附图3所示,图3为导光板图像中具有黑点缺陷的局部图,其中,左图为原图像,中间的图像为经过高斯滤波之后的图像,右图为经过分段线性变换之后的图像。
[0053]
高斯滤波对图像邻域内像素进行平滑时,邻域内不同位置的像素被赋予不同的权值,离模板中心近的像素权值越大,离模板中心远的像素权值越小。高斯滤波的优点:其不仅可以对图像进行平滑,而且还能够更多的保留图像的总体灰度分布特征,高斯滤波的公
式如下:
[0054][0055][0056]
其中,f(x,y)是变换前的像素值,g(x,y)是变换后的像素值,w(s,t)是权值。
[0057]
分段线性变换的优点是突出感兴趣的灰度区间,相对抑制那些不感兴趣的灰度区间,效果如附图9所示,分段线性变换的公式如下:
[0058][0059]
其中,f(x,y)是变换前的像素值,g(x,y)是变换后的像素值,l-1是最大的像素值,a和b为分段线性变换的区间临界值。
[0060]
2、角点检测
[0061]
角点可以认为是图像亮度变化剧烈的点或是图像边缘曲线上曲率极大值的点。角点检测目前被广泛应用于运行检测、图像匹配、视觉跟踪等领域。角点检测算法可以归为三类:基于灰度、基于二值图像和基于轮廓曲线。其中基于灰度图像的角点检测又可分为基于梯度、基于梯度模板和基于模板梯度组合三种方法。常用的模板的角点检测算法有:harris角点检测、klt角点检测、susan角点检测等等。其中harris角点检测算子对亮度和对比度变化不敏感,且具有旋转不变性,比较适合于导光板黑点缺陷检测。
[0062]
harris角点检测算法的核心思想是利用一个局部的窗口在图像的各个方向上进行移动,通过计算灰度变化值来判断该窗口是否位于角点上。harris角点检测算法的示意如附图4所示,图4的左图中的窗口在平坦区域,往任意方向的移动均不会有灰度变化,图4中间图中的窗口在边缘区域,沿着边缘方向移动不会有灰度变化,图4右图中窗口在角点位置,往任意方向的移动都会产生明显的灰度变化。
[0063]
harris角点检测算法的推导如下:
[0064]
根据算法思想,当一个窗口中心位置(x,y)移动到(x+u,y+v)时,计算窗口内移动后像素灰度值的变化量e(u,v),公式如下:
[0065][0066]
式中,w是以(x,y)为中心的窗口,w(x,y)为窗口内的窗口函数,一般为二维高斯分布,可以使角点的定位更加精准,i(x,y)为在(x,y)处的灰度值。
[0067]
式1-(1)的计算会非常缓慢,可以利用二维函数的一阶泰勒展开对其进行化简,推导如下:
[0068]
[0069]ix
和iy为i(x,y)分别在x方向和y方向的偏导数,定义如下:
[0070][0071][0072]
将式1-(2)代入1-(1),继续化简:
[0073][0074]
用矩阵表示为:
[0075][0076]
其中m为:
[0077][0078]
式中,r为可逆矩阵。
[0079]
λ1和λ2即为矩阵m的特征值。理论上,虽然可以通过计算特征值的大小来判断角点,但是计算特征值的运算非常复杂,计算量大。在实际应用中,通常运用角点响应的经验公式来进行判断,定义如下:
[0080]
r=detm-a(tracem)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(8)
[0081]
式中,角点响应函数r值用于判断是否为角点,r的正负和大小都决定着该点是否为角点,具体关系如图5所示,detm表示行列式m的值,tracem表示矩阵m的迹,a为经验常数,一般取值范围在0.04~0.06之间。
[0082]
若令
[0083][0084][0085][0086]
则
[0087]
detm=λ1λ2=ab-c2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(12)
[0088]
tracem=λ1+λ2=a+b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(13)
[0089]
那么,式1-(8)为:
[0090][0091]
一般可以通过设定一个阈值来判断是否为角点。角点响应函数r值的大小与特征值λ1、λ2的大小关系如图5所示。图中左下角区域(平面)λ1和λ2都比较小,|r|较小,说明窗口往各个方向移动灰度差异很小,窗口中心点(x,y)处在较为平坦的区域;图中左上角和右下角区域(边缘)λ1和λ2相差比较大,r小于0,说明窗口在水平或者垂直方向灰度差异比较大,窗口中心点(x,y)位于物体的边缘;图中右上角和中间区域(角点)λ1和λ2均比较大,r大于0,说明窗口无论往哪个方向移动灰度差异都比较大,窗口中心点(x,y)正好位于角点位置,从而获得角点坐标q。
[0092]
通过以上计算后,图像被划分为了平面、边缘和角点,此时可能会检出许多在空间上连续的角点,通过非极大值抑制,可以更精准地定位角点的位置。
[0093]
3、黑点检测
[0094]
经过角点检测步骤之后,可以得到多个角点坐标。事实上,这些角点坐标并不一定都是黑点,这是因为在图像中可能会存在一定的噪点干扰,或是被检出的角点像素值与背景差异并不大,本身可以不作为黑点缺陷。由于上述情况的存在,故需要对检出的角点进行二次确认(进行黑点检测),判断是否为黑点缺陷。
[0095]
本发明对黑点检测的算法思想可以归纳为:首先计算待测角点周围一定范围内的所有像素的均值,再计算外围像素的均值,若两个均值差异大于某一阈值,则判定待测角点为黑点。黑点检测算法的示意图如图6所示,图中所示距离为切比雪夫距离,定义如式1-(15)所示。
[0096]d1,2
=max(|x
1-x2|,|y
1-y2|)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1-(15)
[0097]
其中,x1,x2,y1,y2为点的坐标。
[0098]
通过统计数十张黑点缺陷图像得到黑点缺陷的像素最大半径不超过7个像素。
[0099]
通过步骤2的角点检测算法式1-(14)计算角点,所获得的r大于0区域的窗口中心点(x,y)即为角点坐标q,然后计算距离角点坐标q距离为5以内的区域灰度均值mean1,再计算距离角点坐标q距离为9到11的区域灰度均值mean2,通过判断两个区域灰度均值的差值是否大于事先设定的阈值(threshold)来判断角点是否为黑点,mean2-mean1》threshold时的角点为黑点,具体流程图如图8所示。最后,为方便观测和确认,以黑点坐标为圆心,半径为10像素画圆,将所检测获得的黑点在上位机中标记并显示。
[0100]
通过均值计算之后,可以消除背景噪点的干扰,人为设定的阈值可以将灰度差值过小的点排除,实现了对非黑点缺陷的过滤。通过上述算法,黑点缺陷检测的效果如图7所示。
[0101]
实验:
[0102]
将本发明的一种pad导光板黑点缺陷的视觉检测方法和传统的阈值分割算法和传统的harris角点检测方法进行对比检测实验。传统的阈值分割算法采用单个唯一灰度值来过滤图像中的像素,在本实验中,灰度阈值设为160,大于160灰度值的像素都被过滤掉,小于等于160灰度值的像素被保留。传统harris角点检测算法与本发明算法相比少了最后一步的黑点检测,仅得到角点的坐标q(即仅进行实施例1中的步骤2角点检测)。
[0103]
本实验数据由工业现场采集而来,共1443幅图像,包含无黑点图像447幅,含有一
个黑点图像996幅。然后对所有的图像均依次进行高斯滤波和分段线性变换的预处理,然后分别对预处理后的1443幅图像进行黑点检测,统计的检测结果如表1至表3所示。
[0104]
表1本发明的黑点检测算法实验数据统计
[0105][0106]
表2传统的阈值分割算法实验数据统计
[0107][0108][0109]
表3传统的harris角点检测方法实验数据统计
[0110][0111]
从上述实验数据中可以看出,本专利的检测准确率为100%,相比较而言,传统的阈值分割算法的准确率为92.5%,而传统的harris角点检测方法的准确率仅为4.9%。由于传统的阈值分割算法只用单一阈值作为划分是否为黑点的标准,容易受成像稳定性影响,某些黑点成像后灰度值较大,算法就会发生漏检。而传统的harris角点检测算法由于没有二次确认,导致导光板上的某些导光点被误判为黑点,产生了大量的错误检测。
[0112]
通过对导光板多幅图像的检测试验表明,传统harris角点检测算法只是单纯的利用了角点检测算法,没有进行二次确认,造成的误检的概率较大;本文在已有的算法上新增了比较角点不同距离区域的灰度均值,从而判断角点是否是黑点,大大提高了检测黑点的准确度。
[0113]
最后,还需要注意的是,以上列举的仅是本发明的若干个具体实施例。显然,本发明不限于以上实施例,还可以有许多变形。本领域的普通技术人员能从本发明公开的内容直接导出或联想到的所有变形,均应认为是本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1