一种识别接触网异物的方法与流程
1.本发明涉及高铁供电设备检测方法,特别是一种识别接触网异物的方法。
背景技术:
2.供电系统就是由电源系统和输配电系统组成的产生电能并供应和输送给用电设备的系统。在长距离供电系统中,往往面临线路设备损坏而检修困难的问题,比如常见的鸟窝搭建、线路风化挂断,线路磨损等。
3.在其中,接触网异物在接触网上的挂接,对接触网的伤害极大。由于风筝等异物搭挂高铁接触网引发的事故,很容易造成火车晚点。
4.接触网的特点是露天架设而且没有备用。农民(覆盖的)地膜、工地上的防尘网、塑料大棚、塑料包装袋、风筝线等,当风大时,这些东西随大风漂浮而起,这一类的东西就被称为漂浮物。现阶段,一般登车添乘(检查)来发现异物或者这一类的漂浮物,同时我们也可以采取一些科技手段,比如通过卫星图像比对来发现异物。而现阶段的技术中,对接触网上异物的识别相对困难,同时卫星识别的成本又过高。有相关技术人员提出过根据无人机识别,但是无人机续航时间短,后期的照片识别难度高,手续复杂。同时不能简单地将所有图片上的非接触网附近的异物都花费为接触网异物,会给飞机,飞鸟和漂浮物带来误判,降低工作人员的工作效率,所以该工作一直存在难度。
技术实现要素:
5.本发明的目的就是旨在解决现有技术中高铁沿线供电设备上接触网异物识别困难的问题。
6.本发明的具体方案是:设计一种识别接触网异物的方法,包括如下步骤:(1)图像采集:在高铁车厢的车头外部安装摄录设备,当高铁运行至150km/h以上时,每隔0.2到0.5秒,实施拍照图像采集,形成采集图像,所述采集图像通讯输入或定时硬盘输入图像处理系统开始识别筛分;(2)在采集的图像上找到接触网;从采集图像的右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,当发现单行范围内出现连续两个以上像素数值相似又不同于周边的点的像素数值的、得以独立成线的坐标暗点时,判定该坐标暗点组为疑似接触网线初始点组,得出各接触网线初始点组后,结合相邻上下至少3行,判定当各行间初始点组间起终点纵向坐标差别小于5坐标单位,距离差别小于2坐标单位时,判定为疑似接触网类,再沿各相邻接触网类相连接后,当接触网类呈现连续的状态时,确定所述接触网类相连接的图形为接触网区,之后在图像上以各接触网区两侧500以下个坐标单位为扩展区域,以扩展区域整体划定为初始采集区;(2)在采集的图像上找到立杆:在所述采集图像内,步骤(1)所示的接触网区的下
方设立二次扫描区,在所述二次扫描区内,右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,当发现单行范围内出现连续两个以上像素数值相似又不同于周边点像素数值的坐标暗点时,判定该坐标暗点组为疑似立杆初始点组,得出各立杆初始点组后,结合相邻上下至少3行,判定当各行间初始点组间起终点纵向坐标差别小于5坐标单位,距离差别小于2坐标单位时,判定为疑似立杆,疑似立杆内的区域划定为立杆区;(3)在初始采集区内逐行分析像素点,判定疑似异物区:取步骤(2)中所的初始采集区内,右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,逐行采集单位坐标点像素信息,以2到19像素的递增距离为各级半径,划定至少3个级次的次级取样范围,在每个次级取样范围内,沿步骤(2)中的排查列向上方,逐行排查,形成暗点分布数据,之后分析数据,当取样区域内下方排查列的暗点区域形成封闭图形,判定为空中悬浮物体,当所述悬浮物体与所述接触网区有交集时,判定为疑似异物,本步骤的循环直至次级取样范围的边界与接触网或立杆相交;(4)针对疑似异物找寻每行像素的暗线段分布情况,统计疑似物的轮廓坐标,远程传输服务器,结合数据库判定异物种类。
7.具体实施中,按照对结果的需求等级,当疑似物为鸟类或飞机时,标注疑似。
8.具体实施中,进一步统计异物轮廓中各坐标点的像素颜色信息,当颜色为白色而边缘外颜色为蓝色时,判定为白云,标记疑似。
9.具体实施中,在所述步骤(2)中,当扫描到非规则非线型轮廓时,归类为附加初始采集区,之后通过逐行扫描,当附加初始采集区与接触网有相连接的线段轮廓,判定为倒吊类异物。
10.按照对结果的需求等级,当疑似物为鸟类或飞机时,标注疑似。
11.进一步统计异物轮廓中各坐标点的像素颜色信息,当颜色为白色而边缘外颜色为蓝色时,判定为白云,标记疑似。
12.在所述步骤(2)中,当扫描到非规则非线型轮廓时,归类为附加初始采集区,之后通过逐行扫描,当附加初始采集区与接触网有相连接的线段轮廓,判定为倒吊类异物。
13.异物轮廓中各坐标点的像素颜色信息,当轮廓内外色差小于50时,判定为塑料袋。
14.本发明的有益效果在于:设计了一套识别接触网异物的方法,首先取样方便,无需无人机参与,直接将取样装置挂装于高铁车厢外,一趟线路下来,沿线都会被照到,其次,识别异物给工作人员,核定后可以立即通知辖区场站人员进行维修;再次,有一套完备的图像筛分方法,还能够在方法中添加减少取样区域的方法,节省图像处理后台的图像处理内存,提升设备运行速度;检测方法中,结合各个异物的特点,可以及时分析出异物的情况和种类,给工作人员以参考,结合数据库,实时给出异物种类的判断,有效引导安全管理人员迅速做出进一步的判断。
附图说明
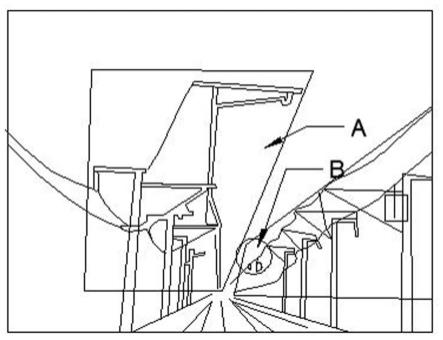
15.图1是本发明步骤(1)中采集的图像事例;图2是本图1中采样区b处放大示意图
a:初始采集区;1.倒吊异物;2.接触网异物;3.非接触异物。
具体实施方式
16.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
17.实施例1一种识别接触网异物的方法,参见图1至图2,包括如下步骤:(1)图像采集:在高铁车厢的车头外部安装摄录设备,当高铁运行至150km/h以上时,每隔0.2到0.5秒,实施拍照图像采集,形成采集图像,所述采集图像通讯输入或定时硬盘输入图像处理系统开始识别筛分;(2)在采集的图像上找到接触网;从采集图像的右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,当发现单行范围内出现连续两个以上像素数值相似又不同于周边的点的像素数值的、得以独立成线的坐标暗点时,判定该坐标暗点组为疑似接触网线初始点组,得出各接触网线初始点组后,结合相邻上下至少3行,判定当各行间初始点组间起终点纵向坐标差别小于5坐标单位,距离差别小于2坐标单位时,判定为疑似接触网类,再沿各相邻接触网类相连接后,当接触网类呈现连续的状态时,确定所述接触网类相连接的图形为接触网区,之后在图像上以各接触网区两侧500以下个坐标单位为扩展区域,以扩展区域整体划定为初始采集区;(2)在采集的图像上找到立杆:在所述采集图像内,步骤(1)所示的接触网区的下方设立二次扫描区,在所述二次扫描区内,右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,当发现单行范围内出现连续两个以上像素数值相似又不同于周边点像素数值的坐标暗点时,判定该坐标暗点组为疑似立杆初始点组,得出各立杆初始点组后,结合相邻上下至少3行,判定当各行间初始点组间起终点纵向坐标差别小于5坐标单位,距离差别小于2坐标单位时,判定为疑似立杆,疑似立杆内的区域划定为立杆区;(3)在初始采集区内逐行分析像素点,判定疑似异物区:取步骤(2)中所的初始采集区内,右下角开始向左上角方向,以单个像素为单位横向排查途径像素点,逐行采集单位坐标点像素信息,以2到19像素的递增距离为各级半径,划定至少3个级次的次级取样范围,在每个次级取样范围内,沿步骤(2)中的排查列向上方,逐行排查,形成暗点分布数据,之后分析数据,当取样区域内下方排查列的暗点区域形成封闭图形,判定为空中悬浮物体,当所述悬浮物体与所述接触网区有交集时,判定为疑似异物,本步骤的循环直至次级取样范围的边界与接触网或立杆相交;(4)针对疑似异物找寻每行像素的暗线段分布情况,统计疑似物的轮廓坐标,远程传输服务器,结合数据库判定异物种类。
18.1.如权利要求1所述的识别接触网异物的方法,其特征在于:按照对结果的需求等级,当疑似物为鸟类或飞机时,标注疑似。
19.2.如权利要求1所述的识别接触网异物的方法,其特征在于:进一步统计异物轮廓中各坐标点的像素颜色信息,当颜色为白色而边缘外颜色为蓝色时,判定为白云,标记疑似。
20.如权利要求3所述的识别接触网异物的方法,其特征在于:在所述步骤(2)中,当扫
描到非规则非线型轮廓时,归类为附加初始采集区,之后通过逐行扫描,当附加初始采集区与接触网有相连接的线段轮廓,判定为倒吊类异物。
21.按照对结果的需求等级,当疑似物为鸟类或飞机时,标注疑似。
22.在所述步骤(2)中,当扫描到非规则非线型轮廓时,归类为附加初始采集区,之后通过逐行扫描,当附加初始采集区与接触网有相连接的线段轮廓,判定为倒吊类异物。
23.本实施例中,主要通过对异物位置、轮廓和与接触网的交集情况判定是否为挂装在接触网上的异物。判断精度高,速度快。
24.工作过程中,首先拍照采样,图像实时或定时传送到服务器,每个照片间的拍照的场景大概在200米的间距,基本上可以覆盖整体沿线,之后逐张扫描,依次筛分出接触网、立杆之后在相关的区域依据封闭轮廓和与接触网的交集筛分出挂装于接触网上的异物,同时再引入一套筛分设备,筛除蓝天白云,飞机飞鸟等多余的数据。本实施例中,多个级次的次级取样范围的确定是为了结果更为精确,比如首先划定一个半径为19个像素点距离的取样轮廓,如果取样的试点在该轮廓内构成独立完整的轮廓,直接划定为悬浮物,如果轮廓被边界不完整的打断,再以19个像素点距离的取样轮廓,如果取样的试点在该轮廓内构成独立完整的轮廓,直至取样的轮廓与接触网有交集,划分为疑似人工确定,或与之前确定的立杆有交集划为疑似人工确定。
25.具体的,本技术中的算法思路是首先找到图像中的暗点,同时形成轮廓,进一步的在逐行的扫描中,对轮廓的图形实现统计,之后对统计后的图形,结合其与接触网的交集情况,判断是否为接触网上挂的异物过程中如果发现飞机状或鸟状,自动筛分出其可能属于误判。
26.实施例2原理同实施例1,具体不同之处在于,进一步统计异物轮廓中各坐标点的像素颜色信息,当颜色为白色而边缘外颜色为蓝色时,判定为白云,标记疑似。同时还有异物轮廓中各坐标点的像素颜色信息,当轮廓内外色差小于50时,判定为塑料袋。
27.而本实施例中,考虑到异物的颜色,有效避免在晴天条件下白云被误判和阴天条件下塑料袋被漏判。
28.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1