基于OCT图像的冠脉血管内支架检测方法及检测系统与流程
基于oct图像的冠脉血管内支架检测方法及检测系统
技术领域
1.本发明涉及医疗图像处理技术领域,尤其涉及一种基于oct图像的冠脉血管内支架检测方法及检测系统。
背景技术:
2.全球范围内,心脑血管疾病已经成为了威胁人类健康的主要疾病之一,冠状动脉粥样硬化是心脑血管疾病的主要病因。目前,冠脉支架介入性治疗方法因其创伤小、效果好,已经成为治疗冠状动脉粥样硬化疾病的一个主要治疗方案。在治疗的过程中,支架通过处理被放在冠状动脉里面,以降低血管再狭窄和形成血栓的概率。
3.光学相干断层成像(optical coherence tomography,oct) 是当前诊断心脑血管疾病的一种最新的血管内影像学技术。oct利用近红外光,是一种高分辨率的影像学技术,可探查生物组织微米级结构。它的轴向分辨率为 10
µ
m左右,横向的分辨率为 20
µ
m左右,探测深度约为2mm。
4.通过使用oct技术对植入支架后的冠脉血管成像,观测者可以清晰观察各种粥样硬化斑块特征,评估支架是否贴壁良好,以及是否存在支架位置覆盖、组织脱垂、组织撕裂、支架内再狭窄、斑块或者血栓等,这些对于临床诊断和治疗都有重要意义。然而,手动的标记支架是一项耗时耗力且效率较低的工程。因此,发明一种高效可行的支架自动检测算法以辅助医生的诊断和治疗十分必要。
5.近年来,国外已有不少期刊发表对冠状动脉支架检测的研究。matheus和diego等人提出了一种基于形态学重建结合特征提取的自动分割算法,可以有效地分割出支架,但是精度较低并且没能找出支架点的位置。nico bruining和kenji sihan等在oct图像基础上,提出了一种基于k近邻的支架检测方法,实现了oct序列的批操作,但对于聚类算法和伪影的问题依然有待后来者深入研究。hong lu等人通过提取oct图像在极坐标下每条a-lines上的一些特征,从而组成特征向量,采用机器学习的方法,利用决策分类树进行训练和分类,检测出支架的位置。该算法对于特征不明显,强度较弱的支架会存在漏检的情况,并且采用机器学习的方法,时间开销较大,满足实时性的要求仍然具有挑战性。目前大部分的支架检测算法鲁棒性和效率不高,存在多检或漏检的情况,并且对于导丝的影响没有较好的解决方法。
技术实现要素:
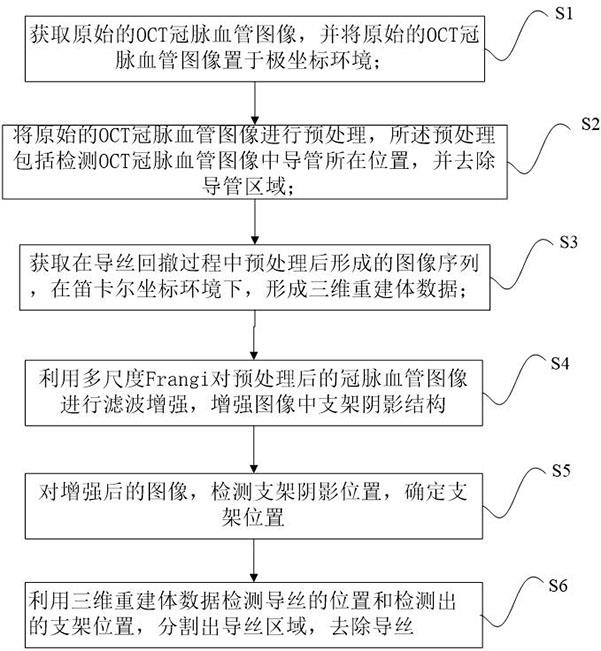
6.因此,本发明的目的在于提供一种基于oct图像的冠脉血管内支架检测方法及检测系统,能够对获取的图像进行处理后,排除图像中导丝的影响,实现对不同尺寸支架的监测。为了实现上述目的,本发明的一种基于oct图像的冠脉血管内支架检测的方法,包括以下步骤:s1、获取原始的oct冠脉血管图像,并将原始的oct冠脉血管图像置于极坐标环境;
s2、将原始的oct冠脉血管图像进行预处理,所述预处理包括检测oct冠脉血管图像中导管所在位置,并去除导管区域;s3、获取在导丝回撤过程中预处理后形成的图像序列,在笛卡尔坐标环境下,形成三维重建体数据;s4、利用多尺度frangi对预处理后的冠脉血管图像进行滤波增强,增强图像中支架阴影结构;s5、对增强后的图像,检测支架阴影位置,确定支架位置;s6、利用三维重建体数据检测导丝的位置和检测出的支架位置,分割出导丝区域,去除导丝。
7.进一步优选的,在s4中,所述在对去除导丝后的图像,利用多尺度frangi进行滤波增强,包括以下步骤:s401、对预处理后的冠脉血管图像,按照设置的尺度空间和步长,计算图像的高斯函数的二阶偏导数;s402、计算图像与高斯二阶偏导的卷积,生成hessian矩阵;s403、计算hessian矩阵特征值,求出不同尺度对应的滤波响应;s404、计算图像中每一个像素的不同尺度中滤波响应的最大值,作为滤波输出。
8.在上述任意一项实施例中进一步优选的,在s5中,所述检测支架阴影位置确定支架位置,包括如下步骤:s501、对多尺度frangi滤波后图像的每条a-line进行灰度累计,得到一个灰度分布曲线;s502、求取所述灰度分度曲线的波峰、波谷的强度值和位置;s503、两个波谷之间存在潜在的阴影区域,再根据设定的阈值范围,得到最终检测出的支架阴影位置。
9.在上述任意一项实施例中进一步优选的,在s503中,得到最终检测出的支架阴影位置,具体包括如下步骤:将灰度分布曲线的波峰的强度值,记为最大值,并标记为潜在的支架位置;将波谷的强度值,记为最小值;计算最大值的2/3处的最大峰值带宽,将设定的最小值和最大峰值带宽,与预设阈值进行比较,确定是否是支架位置;将检测出的输入同一个支架阴影区的支架点进行聚类,从而得到极坐标下支架的位置。
10.在上述任意一项实施例中进一步优选的,在s6中,所述分割出导丝区域,去除导丝,包括以下步骤:将读取的原始oct血管图像以及检测出的支架位置转化到笛卡尔坐标下,对于每帧图像,根据之前利用三维体数据检测出的导丝位置,求取导丝与检测支架点的欧氏距离,将距离最小的支架点作为导丝点去掉,得到了最终的检测结果。
11.本发明还提供一种基于oct图像的冠脉血管内支架检测的系统,包括图像获取模块、三维重建模块、图像增强模块、支架监测模块和导丝去除模块;所述图像获取模块,用于获取极坐标环境下的原始的oct冠脉血管图像, s2、将原
始的oct冠脉血管图像进行预处理,所述预处理包括检测oct冠脉血管图像中导管所在位置,并去除导管区域;所述三维重建模块,获取在导丝回撤过程中预处理后形成的图像序列,在笛卡尔坐标环境下,形成三维重建体数据;所述图像增强模块,利用多尺度frangi对预处理后的冠脉血管图像进行滤波增强,增强图像中支架阴影结构;所述支架监测模块,对增强后的图像,检测支架阴影位置,确定支架位置;所述导丝去除模块,用于将极坐标环境下获取,利用三维重建体数据检测导丝的位置和检测出的支架位置转换到笛卡尔坐标下,并分割出导丝区域,去除导丝。
12.在上述任意一项实施例中进一步优选的,所述图像增强模块,在对去除导丝后的图像,利用多尺度frangi进行滤波增强,执行以下操作:对预处理后的冠脉血管图像,按照设置的尺度空间和步长,计算图像的高斯函数的二阶偏导数;计算图像与高斯二阶偏导的卷积,生成hessian矩阵;计算hessian矩阵特征值,求出不同尺度对应的滤波响应;计算图像中每一个像素的不同尺度中滤波响应的最大值,作为滤波输出在上述任意一项实施例中进一步优选的,所述支架监测模块在检测支架时,包括对多尺度frangi滤波后图像的每条a-line进行灰度累计,得到一个灰度分布曲线;求取所述灰度分度曲线的波峰、波谷的强度值和位置;两个波谷之间存在潜在的阴影区域,再根据设定的阈值范围,得到最终检测出的支架阴影位置。
13.在上述任意一项实施例中进一步优选的,所述根据两个波谷之间存在潜在的阴影区域,再根据设定的阈值范围,得到最终检测出的支架阴影位置,包括将灰度分布曲线的波峰的强度值,记为最大值,并标记为潜在的支架位置;将波谷的强度值,记为最小值;计算最大值的2/3处的最大峰值带宽,将设定的最小值和最大峰值带宽,与预设阈值进行比较,确定是否是支架位置;将检测出的输入同一个支架阴影区的支架点进行聚类,从而得到极坐标下支架的位置。
14.在上述任意一项实施例中进一步优选的,所述导丝去除模块,在去除导丝时,执行以下操作:将读取的原始oct血管图像以及检测出的支架位置转化到笛卡尔坐标下,对于每帧图像,根据之前利用三维体数据检测出的导丝位置,求取导丝与检测支架点的欧氏距离,将距离最小的支架点作为导丝点去掉,得到了最终的检测结果。
15.本技术公开的基于oct图像的冠脉血管内支架检测方法及检测系统,相比于现有技术,至少具有以下优点:1、本发明提供的基于oct图像的冠脉血管内支架检测方法和监测系统,对获取的冠脉图像,利用三维体数据分割导丝;利用多尺度frangi滤波增强后,进行支架阴影位置检测,去除导丝,减少了噪声影响,得到高保真的图像。
16.2、本发明提供的基于oct图像的冠脉血管内支架检测方法和监测系统,在检测支架的过程中,采用frangi滤波器,对滤波后的图像的每条a-line进行灰度累计,通过统计波峰波谷,并与设置的阈值进行比较,从而准确的判断支架的位置,避免对强度较弱的支架形
成漏检,同时frangi滤波后计算量减小,支架检测算法鲁棒性显著提高,计算效率明显提升。
附图说明
17.图1为本发明基于oct图像的冠脉血管内支架检测方法的方法流程示意图;图2为原始的oct冠脉血管图像;图3为经过预处理后的冠脉血管图像;图4为三维重建结果示意图;图5为多尺度frangi滤波增强算法的流程示意图;图6为多尺度frangi滤波后的冠脉血管图像;图7为检测支架阴影位置算法的流程示意图;图8为对每条a-line进行灰度累计后的强度曲线图;图9为确定支架位置算法的流程示意图;图10为一条a-line的灰度分布曲线图;图11为极坐标下支架检测结果示意图;图12为笛卡尔坐标下支架检测结果示意图;图13为另一帧冠脉血管内支架检测结果示意图;图14为本发明提供的基于oct图像的冠脉血管内支架检测系统的结构示意图。
具体实施方式
18.以下通过附图和具体实施方式对本发明作进一步的详细说明。
19.如图1所示,本发明一方面实施例提供的基于oct图像的冠脉血管内支架检测方法,包括以下步骤s1、获取原始的oct冠脉血管图像,并将原始的oct冠脉血管图像置于极坐标环境;s2、将原始的oct冠脉血管图像进行预处理,所述预处理包括检测oct冠脉血管图像中导管所在位置,并去除导管区域;s3、获取在导丝回撤过程中预处理后形成的图像序列,在笛卡尔坐标环境下,形成三维重建体数据;s4、利用多尺度frangi对预处理后的冠脉血管图像进行滤波增强,增强图像中支架阴影结构;s5、对增强后的图像,检测支架阴影位置,确定支架位置;s6、利用三维重建体数据检测导丝的位置和检测出的支架位置,分割出导丝区域,去除导丝。
20.在一个实施例中步骤s1,获取原始oct冠脉血管图像时,是从光学相干断层成像系统中实时采集的数据或者读取事先采集并保存好的数据,此时的血管图像是基于ρ轴和θ轴定义的极坐标下的图像。ρ轴为径向采样,代表每条a-line的采样点数,θ轴为扫描角度的采样,代表a-line的线数。在本实施案例中,读取的原始oct血管图像的大小为1000线
×
512点,如图2所示。原始的oct图像大小可根据实际情况中数据采集的点数和线数而改变,并不限于1000线
×
512点。
21.在s2中,由于导管成像比较亮,会对支架检测造成干扰。因此,需要检测所述的oct图像中导管所在的区域,并将导管所在的区域从原图像中去除。
22.由于导管成像在整个oct血管图像中的位置和大小是固定的,故可以设定一个固定阈值消除导管的影响。在本实施案例中,阈值可设置为80,但不限于80,可以根据实际情况中导管的大小以及图像的大小设置合理的阈值。将原始oct图像中ρ值小于80的图像直接切除,从而消除导管带来的影响,处理后的图像大小变成了1000
×
432。通过此过程,不仅消除了导管的影响,并且减小了图像的尺寸,从而在不影响支架检测的前提下提高了算法的运行效率。
23.oct成像系统在获取血管图像的过程中会受到噪声的污染,尤其因为生物组织光学特性的不同产生了较多的散斑噪声。为了得到高保真的图像,尽可能的还原组织信息的真实结构,保证后期算法的稳定性,必须对获取的oct 图像作去噪处理。通过对各种滤波算法的研究和验证,考虑到噪声的去除和边缘的保留,在本实施案例中,滤波器优选5*5大小的中值滤波器,当然也可以采用其他尺寸的中值滤波器或者均值滤波器、高斯滤波器等其他滤波器。经过预处理后的图像,如图3所示。
[0024] 在s3中,利用三维体数据分割导丝,首先将整个回撤过程中经过预处理后的图像序列转化到笛卡尔坐标下,再利用光线投影法对图像序列进行三维重建,三维重建的结果,如图4所示。在三维体数据的导丝区域选取初始的种子点,根据设定的相似性准则更新种子点,并放入栈中,当没有更多的新种子点产生时,区域生长法结束,此时栈中所有体素构成的元素即为导丝区域。在本实施案例中,相似性准则如式(1),式中为种子点处的灰度值,为种子点邻域内体素的灰度值,邻域大小为3*3*3,阈值t设为16。对得到的导丝区域,在x,y方向上进行聚合求平均,从而得到每帧图像中导丝的位置。
[0025] (公式1)s4中,多尺度frangi滤波增强,在本实施案例中,优选三个尺度的frangi滤波器,参照图5,在一个多尺度frangi滤波增强的过程中,包括以下步骤:s401,获取预处理后的冠脉血管图像;初始化空间尺度,范围为[3,7],迭代步长step=2;根据式(2)~(5),计算高斯函数的二阶偏导,;高斯核函数:(公式2)x方向上的二阶偏微分:(公式3)y方向上的二阶偏微分:(公式4)
x,y方向上的混合偏微分: (公式5)s402,计算图像与高斯函数二阶偏导的卷积,生成hessian矩阵;s403,计算hessian矩阵的特征值和,且;根据式(6)~(8)求出对应的滤波响应,在本实施案例中,通过多次试验选择,;β为区域抑制参数,β愈大则对条状区域抑制愈弱。c为平滑参数,c愈大图像愈平滑。
[0026]
(公式6)(公式7) (公式8)s404,根据式(9),求出图像中每一个像素不同尺度中滤波响应最大值作为最终输出,结果如图6所示。
[0027]
(公式9)步骤s5,检测支架阴影位置,参照图7,在一个检测支架阴影位置的过程中,包括以下步骤:s501,对frangi滤波后的图像的每条a-line进行灰度累计,得到一个灰度分布曲线,采用1000
×
1的向量表示,如图8所示;s502,寻找上述向量的波峰和波谷,并记录其位置,及对应的强度值,,,其中,,每对波谷之间存在一个候选的支架阴影区域;s503,根据式(10)计算候选支架阴影区域的强度值;(公式10)优选的,s504根据先验知识确定支架阴影区的阈值为threshold,在本实施案例中,经过多次实验发现,threshold=(maxv-minv)*0.25时效果最好,maxv、minv分别为上述向量的最大、最小值,从而实现了自适应的阈值设置。
[0028]
s505将的候选阴影区作为最终检测出的支架阴影区域,支架阴影区域的位置为。
[0029]
在上述检测出的支架阴影区域检测支架位置,参照图9,在一个检测支架位置的过程中,包括以下步骤:求支架阴影区域内每条a-line的灰度分布曲线,其中一条a-line的灰度分布曲线如图10所示,图中为横坐标,灰度值i为纵坐标,从图10中可明显看出曲线具有一个的快
速上升且快速下降的波峰,该波峰即为确定a-line是否包括属于支架坐标点的重要特征;求每条a-line灰度分布曲线中最大峰值对应的灰度值及位置;求2/3峰值处的峰值带宽,参考图10;寻找属于支架的点,如果a-line的最大峰值大于最小峰值且峰值带宽小于最大峰值带宽,则确定该a-line包括属于支架的点,并且即为属于支架的坐标点。在本实施案例中,最小峰值为80,最大峰值带宽为18;确定支架位置,在同一个支架阴影区域内对求出的所有属于该支架的坐标点进行聚合,根据欧氏距离去除一些离群点,再求其他点坐标的平均值作为最终的支架位置。在极坐标下,检测结果如图11所示。
[0030]
步骤s6,坐标转换及去除导丝,利用式(11)将原始oct冠脉血管图像以及检测出的支架点转化到笛卡尔坐标下。在本实施案例中,笛卡尔坐标下的oct血管图像的中心为,图像的大小为,然后计算支架与上述所求导丝的欧式距离,将距离最小的支架点判定为导丝并将其去掉,从而得到最终的支架检测结果。
[0031]
ꢀꢀ
(公式11)通过以上的步骤便可以实现对oct冠脉血管内支架的自动检测,检测结果如图12所示。图13是对该回撤过程中另一帧冠脉血管图像内支架的检测结果示意图。从检测结果图中可以看出,本发明提出的一种基于oct图像的冠脉血管内支架检测的方法能够准确的检测出不同尺寸大小的支架,降低了漏检率,并且不受导丝的影响,检测算法简单有效,具有较好的鲁棒性和实时性。
[0032]
如图14所示,本发明还提供一种基于oct图像的冠脉血管内支架检测的系统,用于实施上述方法,包括图像获取模块、三维重建模块、图像增强模块、支架监测模块和导丝去除模块;所述图像获取模块,用于获取极坐标环境下的原始的oct冠脉血管图像,将原始的oct冠脉血管图像进行预处理,所述预处理包括检测oct冠脉血管图像中导管所在位置,并去除导管区域;所述三维重建模块,获取在导丝回撤过程中预处理后形成的图像序列,在笛卡尔坐标环境下,形成三维重建体数据;所述图像增强模块,利用多尺度frangi对预处理后的冠脉血管图像进行滤波增强,增强图像中支架阴影结构;所述支架监测模块,对增强后的图像,检测支架阴影位置,确定支架位置;所述导丝去除模块,用于将极坐标环境下获取,利用三维重建体数据检测导丝的位置和检测出的支架位置转换到笛卡尔坐标下,并分割出导丝区域,去除导丝。
[0033]
所述图像增强模块,在对去除导丝后的图像,利用多尺度frangi进行滤波增强,执行以下操作:对预处理后的冠脉血管图像,按照设置的尺度空间和步长,计算图像的高斯函数的二阶偏导数;计算图像与高斯二阶偏导的卷积,生成hessian矩阵;计算hessian矩阵特征值,求出不同尺度对应的滤波响应;计算图像中每一个像素的不同尺度中滤波响应的最大值,作为滤波输出。
[0034]
在上述任意一项实施例中进一步优选的,所述支架监测模块在检测支架时,包括对多尺度frangi滤波后图像的每条a-line进行灰度累计,得到一个灰度分布曲线;求取所述灰度分度曲线的波峰、波谷的强度值和位置;两个波谷之间存在潜在的阴影区域,再根据设定的阈值范围,得到最终检测出的支架阴影位置。
[0035]
在上述任意一项实施例中进一步优选的,所述根据两个波谷之间存在潜在的阴影区域,再根据设定的阈值范围,得到最终检测出的支架阴影位置,包括将灰度分布曲线的波峰的强度值,记为最大值,并标记为潜在的支架位置;将波谷的强度值,记为最小值;计算最大值的2/3处的最大峰值带宽,将设定的最小值和最大峰值带宽,与预设阈值进行比较,确定是否是支架位置;将检测出的输入同一个支架阴影区的支架点进行聚类,从而得到极坐标下支架的位置。
[0036]
在上述任意一项实施例中进一步优选的,所述导丝去除模块,在去除导丝时,执行以下操作:将读取的原始oct血管图像以及检测出的支架位置转化到笛卡尔坐标下,对于每帧图像,根据之前利用三维体数据检测出的导丝位置,求取导丝与检测支架点的欧氏距离,将距离最小的支架点作为导丝点去掉,得到了最终的检测结果。
[0037]
显然,上述实施例仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1