具有切换拓扑结构的复杂网络的状态估计方法
1.本发明属于计算机技术领域,特别是状态估计、控制方法技术领域,具体涉及一种具有切换拓扑结构的时滞非线性复杂网络基于二进制编码的状态估计方法。
背景技术:
2.复杂网络由于能够模拟社交网络、电网、通信网络等各种大型复杂系统,而受到了广大学者的关注,而现实生活中的电网和通信网络的动态变化使分析动态问题带来了巨大挑战。众所周知,状态信息在复杂系统的动态分析中起着至关重要的作用。然而,在大多数情况下,各节点的状态信息是未知的,所以状态估计已成为一种热门的研究方法,通过已知可测量的信息来进行状态估计。由于通信网络的飞速发展,二进制编码方案成为数字通信中最流行的方案之一由于其传输的鲁棒性和易实现性,在二进制编码方案下,信号首先应该被编码成一组二进制位,通过二进制对称信道进行传输。由于信道噪声的影响,此传输过程不可避免地会产生随机比特误差,使得解码得到的测量信号明显偏离原始信号。近年来,人们对于二进制编码方案进行了初步的研究,然而在二进制编码下,还未有针对于具有切换拓扑结构的复杂网络状态估计方法。
技术实现要素:
3.本发明的目的在于提供一种具有切换拓扑结构的复杂网络的状态估计方法,以解决目前现有的状态估计方法不能同时考虑马尔科夫参数、传感器非线性、时滞、随机干扰,进而影响状态估计性能的问题。
4.本发明方法具体是:
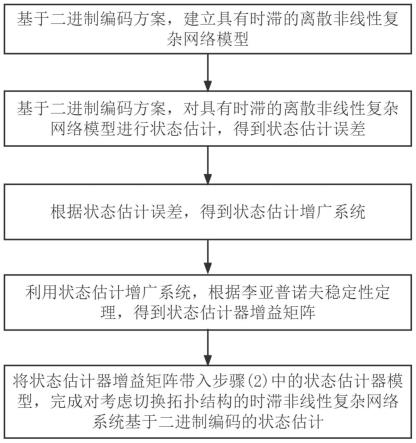
5.步骤(1)基于二进制编码方案,建立具有时滞的离散非线性复杂网络模型;
6.步骤(2)基于二进制编码方案,对具有时滞的离散非线性复杂网络模型进行状态估计,得到状态估计误差;
7.步骤(3)根据状态估计误差,得到状态估计增广系统;
8.步骤(4)利用状态估计增广系统,根据李亚普诺夫稳定性定理,得到状态估计器增益矩阵;
9.步骤(5)将状态估计器增益矩阵带入步骤(2)中的状态估计器模型,完成对考虑切换拓扑结构的时滞非线性复杂网络系统基于二进制编码的状态估计。
10.进一步,步骤(1)具体是:
11.所述的离散非线性复杂网络模型状态空间形式为:
[0012][0013][0014]
其中,表示复杂网络动态模型中第i个节点在时刻的状态向量,表示第i个节点在时刻的状态向量,表示第i个节点在时刻从系统中接收到的测量
输出;f(
·
)表示满足扇形有界条件的非线性激励函数;和表示期望为零、且满足方差有界的噪声;表示复杂网络动态系统的时滞满足上下界为正标量τm和τm的范围,表示第j个节点在时刻的状态向量;在时刻的模态为随机变量,是一个齐次马尔可夫链在有限的状态空间范围{1,2,
…
,s},模态序号s=1,2,
…
,s,s为模态数量,γ表示内耦合矩阵是一个对角阵,中间函数δ(
·
)定义为)定义为表示复杂网络动态模型中第s种模态下第i个节点和第j个节点的加权邻接参数,i,j=1,2,
…
,n,且i≠j,n为节点数量,加权邻接[
·
]n×n表示n
×
n维矩阵;ai、ci、di为已知的参数矩阵;
[0015]
测量输出首先被编码到一个有限长度二进制字符串中,然后通过一个无记忆的二进制对称信道传输到估计器进行处理,具体过程如下:
[0016]
首先测量输出通过编码器被编码成一个长度为l的二进制字符串,将的振幅范围[-h,h]范围划分为2
l-1段,且均匀间隔长度
[0017]
使用随机截断函数对测量输出进行预处理,得到截断信号具体是:当j
l
表示设定的第l个二进制字符的数值,l=1,2,
…
,l,得到:的概率的概率的概率概率值截断误差是一个随机变量,的期望的期望的方差
[0018]
将截断信号编码成一个长度为l的二进制位字符串且其中的字符其中的字符通过得到。
[0019]
二进制位字符串通过无记忆的二进制对称信道进行传输,以交叉概率进行翻转,翻转后字符串且其中的字符且其中的字符且其中的字符为伯努利变量,满足为伯努利变量,满足交叉概率α∈[0,1]。
[0020]
根据接收到的翻转后字符串解码后恢复的信号
[0021]
的期望方差中间值
[0022]
为了补偿失真,进行恢复测量,恢复后测量输出
[0023]
设定比特反转误差为一个随机变量,其期望方差
[0024]
最后得到的离散非线性复杂网络模型的测量输出
[0025]
再进一步,步骤(2)中状态估计器模型为:
[0026][0027]
其中,表示状态估计器模型中第i个节点在时刻对的估计值,表示第i个节点在时刻对的估计值,表示与模态相关的待求状态估计器增益矩阵。
[0028]
状态估计误差方程为:
[0029]
其中,k
i,s
表示与第s个模态相关的待求状态估计器增益矩阵。
[0030]
第i个节点在时刻的状态估计误差第i个节点在时刻的状态估计误差
[0031]
更进一步,步骤(3)中状态估计增广系统表示为:
[0032][0033]
其中,时刻增广后状态估计误差coln{
·
}表示n维列向量,增广后待求状态估计器增益矩阵ks=diagn{k
i,s
},diagn{
·
}表示n维对角阵;增广后的参数矩阵a=coln{ai},d=coln{di},c=diagn{ci},增广后的截断误差增广后的比特反转误差增广后的加权邻接矩阵中间函数函数表示克罗内克积运算。
[0034]
又进一步,步骤(4)具体是:
[0035]
由得到矩阵ps,xs,通过公式求解出状态估计器增益矩阵ks;其中,ps,xs为待求矩阵,i为单位矩阵,γ,π均为未知的正常数,t表示转置操作,*表示矩阵中的对称项,非线性系数矩阵非线性参数矩阵q表示未知对称正定矩阵,u1,u2为已知的常数矩阵,待求的变异矩阵转移概率值满足0<λs′s<1且
[0036]
所述的李亚普诺夫稳定性定理为:
[0037][0038]
其中:
[0039]
函数第一分量函数第一分量表示与相关的未知对称正定矩阵;
[0040]
函数第二分量t表示t时刻;
[0041]
函数第三分量t
′
表示t
′
时刻。
[0042]
式中,为时刻与模态相关的李亚普诺夫函数,为时刻与模态相关的李亚普诺夫函数。
[0043]
本发明的状态估计方法,考虑了具有耦合性、时滞以及非线性的复杂网络,能够用来建模许多工程中的复杂网络,此外,本发明估计方法采用了二进制编码方案,能够减少传输过程能量的消耗与网络带宽资源的占用,对系统进行建模,得到非线性系统模型,通过状态增广得到总体系统模型,最后得到估计器的参数设计方案,通过对状态进行估计,从而实现对复杂网络运行状态的监测,以及保障网络安全平稳运行有着重要应用,因而很好满足了实际应用需求。
附图说明
[0044]
图1为本发明方法的流程示意图;
[0045]
图2是节点1上的状态信息和估计轨迹对比图;
[0046]
图3是节点1上的状态信息和估计轨迹对比图;
[0047]
图4是节点2上的状态信息和估计轨迹对比图;
[0048]
图5是节点2上的状态信息和估计轨迹对比图;
[0049]
图6是节点3上的状态信息和估计轨迹对比图;
[0050]
图7是节点3上的状态信息和估计轨迹对比图;
[0051]
图8是各个节点第一分量的估计误差;
[0052]
图9是各个节点第二分量的估计误差。
具体实施方式
[0053]
以下结合具体实施例对本发明做进一步的说明,但下述实例绝非对本发明有任何限制。
[0054]
如图1所示,具有切换拓扑结构的复杂网络的状态估计方法,具体如下:
[0055]
步骤(1)基于二进制编码方案,建立具有时滞的离散非线性复杂网络模型;具体是:
[0056]
所述的离散非线性复杂网络模型状态空间形式为:
[0057][0058]
其中,表示复杂网络动态模型中第i个节点在时刻的状态向量,表示第i个节点在时刻的状态向量,表示第i个节点在时刻从系统中接收到的测量输出;f(
·
)表示满足扇形有界条件的非线性激励函数;和表示期望为零、且满足方差有界的噪声;表示复杂网络动态系统的时滞满足上下界为正标量τm和τm的范围,表示第j个节点在时刻的状态向量;在时刻的模态为随机变量,是一个齐次马尔可夫链在有限的状态空间范围{1,2,
…
,s},模态序号s=1,2,
…
,s,s为模态数量,γ表示内耦合矩阵是一个对角阵,中间函数δ(
·
)定义为为表示复杂网络动态模型中第s种模态下第i个节点和第j个节点的加权邻接参数,i,j=1,2,
…
,n,且i≠j,n为节点数量,加权邻接[
·
]n×n表示n
×
n维矩阵;ai、ci、di为已知的参数矩阵。
[0059]
在考虑二进制编码方案的情况下,测量输出首先被编码到一个有限长度二进制字符串中,然后通过一个无记忆的二进制对称信道传输到估计器进行处理,具体过程如下:
[0060]
首先测量输出通过编码器被编码成一个长度为l的二进制字符串,将的振幅范围[-h,h]范围划分为2
l-1段,且均匀间隔长度
[0061]
使用随机截断函数对测量输出进行预处理,得到截断信号具体是:当j
l
表示设定的第l个二进制字符的数值,l=1,2,
…
,l,得到:的概率的概率的概率概率值截断误差是一个随机变量,的期望的期望的方差
[0062]
将截断信号编码成一个长度为l的二进制位字符串且其中的字符其中的字符通过得到。
[0063]
二进制位字符串通过无记忆的二进制对称信道进行传输,其中每个比特可能由于信道噪声,以交叉概率进行翻转,翻转后字符串且其中的字符且其中的字符为伯努利变量,满足为伯努利变量,满足交叉概率α∈[0,1]。
[0064]
根据接收到的翻转后字符串解码后恢复的信号
[0065]
的期望方差中间值
[0066]
与原始的测量输出相比,实际接收到的信号不可避免地会经历一定程度的畸变。为了补偿失真,进行恢复测量,恢复后测量输出
[0067]
设定比特反转误差为一个随机变量,其期望方差
[0068]
最后得到的离散非线性复杂网络模型的测量输出
[0069]
步骤(2)基于二进制编码方案,对具有时滞的离散非线性复杂网络模型进行状态估计,得到状态估计误差。状态估计器模型为:
[0070][0071]
其中,表示状态估计器模型中第i个节点在时刻对的估计值,表示第i个节点在时刻对的估计值,表示与模态相关的待求状态估计器增益矩阵。
[0072]
状态估计误差方程为:
[0073]
其中,k
i,s
表示与第s个模态相关的待求状态估计器增益矩阵。
[0074]
第i个节点在时刻的状态估计误差第i个节点在时刻的状态估计误差
[0075]
步骤(3)根据状态估计误差,得到状态估计增广系统。状态估计增广系统表示为:
[0076][0077]
其中,时刻增广后状态估计误差coln{
·
}表示n维列向量,增广后待求状态估计器增益矩阵ks=diagn{k
i,s
},diagn{
·
}表示n维对角阵;增广后的参数矩阵a=coln{ai},d=coln{di},c=diagn{ci},增广后的截断误差增广后的比特反转误差增广后的加权邻接矩阵中间函数函数表示克罗内克积运算。
[0078]
步骤(4)利用状态估计增广系统,根据李亚普诺夫稳定性定理,得到状态估计器增益矩阵。具体是:
[0079]
由得到矩阵ps,xs,通过公式求解出状态估计器增益矩阵ks;其中,ps,xs为待求矩阵,i为单位矩阵,γ,π均为未知的正常数,t表示转置操作,*表示矩阵中的对称项,非线性系数矩阵非线性参数矩阵q表示未知对称正定矩阵,u1,u2为已知的常数矩阵,待求的变异矩阵转移概率值满足0<λs′s<1且
[0080]
所述的李亚普诺夫稳定性定理为:
[0081][0082]
其中:
[0083]
函数第一分量函数第一分量表示与相关的未知对称正定矩阵;
[0084]
函数第二分量t表示t时刻;
[0085]
函数第三分量t
′
表示t
′
时刻。
[0086]
式中,为时刻与模态相关的李亚普诺夫函数,为时刻与模态相关的李亚普诺夫函数。
[0087]
步骤(5)将状态估计器增益矩阵带入步骤(2)中的状态估计器模型,完成对考虑切换拓扑结构的时滞非线性复杂网络系统基于二进制编码的状态估计。
[0088]
下面采用本发明所述方法进行仿真验证。
[0089]
系统参数:
[0090]
c1=c2=[0.3 0.5],
[0091]
c3=[0.3 0.3],d1=d2=d3=0.2,a1=[0.06 0.05],a2=[0.08 0.05],
[0092]
a3=[0.05 0.04]。
[0093]
仿真设定复杂网络的节点数目n=3,有限的状态空间范围是,转移概率值λ
11
=0.4,λ
12
=0.6,λ
21
=0.3,λ
22
=0.7,内耦合矩阵γ=0.1i,时滞π为圆周率,则τm=1,τm=2。非线性激励函数其中此外和的方差上界都为0.4,l=6,π=0.1,α=0.01,状态的初始值设置为:状态的初始值设置为:
[0094][0095]
求解得到状态估计器增益矩阵ks为如下形式:
[0096][0097]
状态估计器效果:
[0098]
图2是节点1上的状态信息和估计轨迹对比图;图3是节点1上的状态信
息和估计轨迹对比图;图4是节点2上的状态信息和估计轨迹对比图;图5是节点2上的状态信息和估计轨迹对比图;图6是节点3上的状态信息和估计轨迹对比图;图7是节点3上的状态信息和估计轨迹对比图;图8是各个节点第一分量的估计误差;图9是各个节点第二分量的估计误差。
[0099]
由图2至图9可见,对于具有切换拓扑结构的时滞非线性复杂网络系统基于二进制编码方案,本发明的状态估计器设计方法能够有效地估计出目标状态。
[0100]
本发明涉及一种随机切换拓扑结构和时滞状态估计方法。需要进一步说明的是,本发明方法中的步骤(2)-(5)给出了具体实现该步骤的方法,本领域技术人员也可以根据理解分别根据现有技术在细节或实现上进一步完善该步骤方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1