一种智慧校园数据维护系统的制作方法
1.本实用新型涉及数据维护系统领域,特别地,涉及一种智慧校园数据维护系统。
背景技术:
2.校园是学生、老师聚集教学的地方,随着科技的发展进步,教学的技术水平也带入了电子科技产品,如灯具、投影仪、电脑、广播、监控器等设备,这些设备通过网络相互连接,每个教室也都会配备这些电子设备。从而形成了智慧校园,在其中,对于一些电子设备的数据维护上需要花费较多的人力和物力以保证电子设备的运行正常。
3.例如目前走廊上均采用智能控制的灯具,次灯具的开启和关闭受时间控制,在晚上的时候开启,在白天的时候关闭。一般在晚自习结束后是可以全部关闭灯具。
4.就目前对于校园走廊上的灯具的状态维护,需要配备人员去巡检,也就是可以先将灯具全部点亮,然后检修人员到达对应灯具位置,依次排查是否有灯具不亮,由此可见比较耗费人力,不利于长期运行。
技术实现要素:
5.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。有鉴于此,本实用新型目的在于提出一种智慧校园数据维护系统,具有对灯具状态进行故障检查、便于维护的优势。
6.为了解决上述技术问题,本实用新型的技术方案是:一种智慧校园数据维护系统,包括直排的走廊、安装在走廊顶部的灯具,所述走廊顶部沿灯具排列方向固定连接有直线轨道,所述直线轨道上安装有行走小车,所述行走小车上安装有故障检测器,所述故障检测器包括光线传感器、信号比较器、微处理器以及无线通信模块,所述光线传感器连接信号比较器用于判断灯具发光状态,所述微处理器连接信号比较器用于接收灯具状态信号,所述无线通信模块连接微处理器用于传递灯具状态信号;
7.其中,行走小车在直线轨道上行走以感应灯具状态。
8.作为本实用新型的具体方案可以优选为:所述行走小车包括遥控发送器、遥控接收器、小车控制驱动器、以及小车电机,遥控发送和遥控接收器无线通信连接,遥控接收器连接小车控制驱动器用于提供正转信号或反转信号,小车控制驱动器连接小车电机用于控制行走小车前进或后退。
9.作为本实用新型的具体方案可以优选为:所述行走小车包括壳体、滑移连接在壳体内的切换杆、用于触发反转信号的反转电路、用于触发正转信号的正转电路、小车控制驱动器、以及小车电机;
10.切换杆延伸出壳体的两端,切换杆的中间位置用于控制反转电路或正转电路选择一个触发;
11.其中,在行走小车前进触及墙壁后推动切换杆滑移,实现小车从前进运动改为后退运动。
12.作为本实用新型的具体方案可以优选为:所述直线轨道呈“c”形,直线轨道上设置有供螺栓固定的固定孔。
13.作为本实用新型的具体方案可以优选为:所述信号比较器包括比较器元件和基准电路,基准电路连接比较器元件的反相端,光线传感器连接比较器元件的同相端,比较器元件输出具有脉宽的电信号。
14.作为本实用新型的具体方案可以优选为:还包括用于接收无线通信模块的信号的显示器,显示器用于显示灯具状态。
15.本实用新型技术效果主要体现在以下方面:
16.1、基于现有都灯具安装环境和基础上,对走廊位置灯具实现巡检,代替部分人力工作部分,减轻人工负担,提高智能化程度;
17.2、系统搭建简单方便,实施容易,功能器件采用市场上现有功能模块实现组合,达到巡检的目的;
18.3、工作可靠,应用广泛。
附图说明
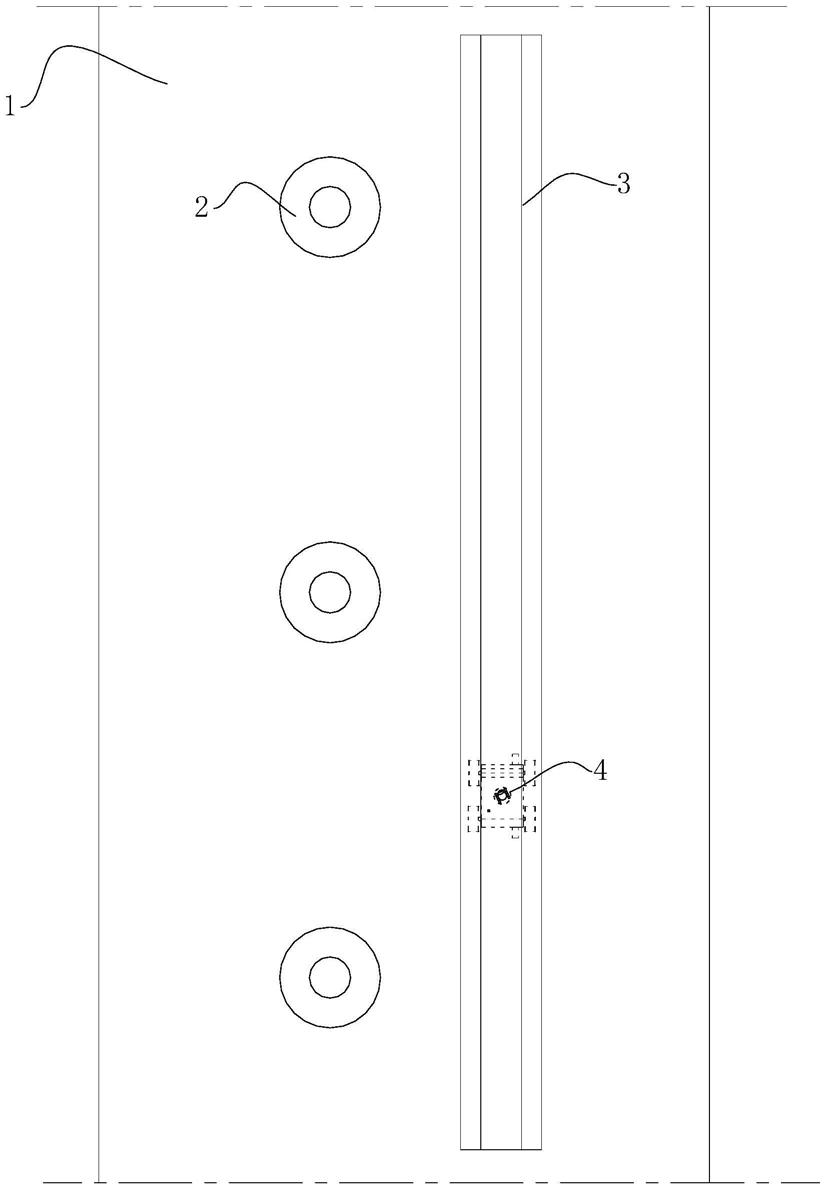
19.图1为走廊顶部安装布置图;
20.图2为行走小车示意图;
21.图3为切换杆切换原理图;
22.图4为直线轨道的一种示意图;
23.图5为行走小车的安装巡检状态示意图;
24.图6为行走小车的驱动原理图;
25.图7为行走小车遥控结构原理图;
26.图8为故障检测器结构原理图;
27.图9为未故障状态下一种灯具状态信号图;
28.图10为故障状态下一种灯具状态信号图。
29.附图标记:1、走廊;2、灯具;3、直线轨道;31、固定孔;4、行走小车;41、小车控制驱动器;42、小车电机;43、壳体;44、切换杆;45、反转电路;46、正转电路;5、故障检测器;51、光线传感器;52、信号比较器;521、比较器元件;522、基准电路;53、微处理器;54、无线通信模块;6、遥控发送器;7、遥控接收器;8、显示器。
具体实施方式
30.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,以使本实用新型技术方案更易于理解和掌握,而不能理解为对本实用新型的限制。
31.实施例1:
32.一种智慧校园数据维护系统,主要应用在校园走廊1的场景中,参考图1所示,视角状态为仰视,走廊1顶部固定若干灯具2,灯具2呈现一排,在灯具2附近固定上直线轨道3。具体的本系统包括直排的走廊1、安装在走廊1顶部的灯具2,此为应用环境。在上述环境中如
何实施参考如下。
33.参考图4和图5所示,走廊1顶部沿灯具2排列方向固定连接有直线轨道3,直线轨道3上安装有行走小车4,直线轨道3呈“c”形,直线轨道3上设置有供螺栓固定的固定孔31。通过螺栓即可将直线轨道3固定在走廊1顶部。行走小车4可以从直线轨道3的一端进入,直线轨道3使得行走小车4只能按照直线轨道3的方向运动。
34.结合图5和图8所示,行走小车4上安装有故障检测器5。故障检测器5包括光线传感器51、信号比较器52、微处理器53以及无线通信模块54。
35.光线传感器51为市场上选购的gy
‑
485
‑
44009高精度rs485光照度光强度光亮度模块传感器模块。
36.参考图8所示,信号比较器52包括比较器元件521和基准电路522,基准电路522连接比较器元件521的反相端,光线传感器51连接比较器元件521的同相端,比较器元件521输出具有脉宽的电信号。基准电路522主要包括电阻r2、r1,电压v1通过电阻r2和r1后接地,电阻r1为可调电阻,从而电压v1通过电阻分压输入给比较器元件521的反相端,提供比较基准。具体的,在工作过程中:参考图9和图10所示,图9为灯具2正常状态下的灯具2状态信号s1。图10为中间一个灯具2故障不亮的情况下的灯具2状态信号s1。通过两者的比较可见,光线传感器51连接信号比较器52用于判断灯具2发光状态,微处理器53连接信号比较器52用于接收灯具2状态信号,无线通信模块54连接微处理器53用于传递灯具2状态信号。
37.微处理器53采用51单片机最小系统即可完成信号的传递和处理。无线通信模块54采用wi f i模块实现无线连接。无线通信模块54还可以采用蓝牙模块实现无线对接。
38.其中,行走小车4在直线轨道3上行走以感应灯具2状态。
39.对于行走小车4可以选用普通现有遥控车。例如可以采用一些破损的玩具遥控车进行回收,重复利用。还可以从市场上选购合适的遥控车。
40.一般的遥控车即可成为本方案中的行走小车4,行走小车4包括遥控发送器6、遥控接收器7、小车控制驱动器41、以及小车电机42,遥控发送和遥控接收器7无线通信连接,遥控接收器7连接小车控制驱动器41用于提供正转信号或反转信号,小车控制驱动器41连接小车电机42用于控制行走小车4前进或后退。
41.实施的是,是借助现有的遥控的行走小车4,在其壳体43上固定或搭载故障检测器5。可以实现人为操作。
42.实施例2:
43.对行走小车4的改良版,参考图2和图3所示,基于上述实施例1,其区别之处在于增加机械的控制结构,能够实现机械触碰的前进后退的切换。
44.行走小车4包括壳体43、滑移连接在壳体43内的切换杆44、用于触发反转信号的反转电路45、用于触发正转信号的正转电路46、小车控制驱动器41、以及小车电机42。
45.切换杆44延伸出壳体43的两端,切换杆44的中间位置用于控制反转电路45或正转电路46选择一个触发;其中,在行走小车4前进触及墙壁后推动切换杆44滑移,实现小车从前进运动改为后退运动。
46.参考图6为行走小车4的控制图。
47.在正常情况下,参考图2所示,行走小车4在前进的时候,触碰到线轨端部的墙壁的时候,则墙壁将使得切换杆44往后推,此时参考图3所示,此时切换杆44就连通了正转电路
46,电机的运行方向直接切换过来,则往相反方向运动。同理,当触碰到线轨另一端位置的顶部墙壁,则行走小车4再次返回。由此,实现小车在直线轨道3上来回运动。在本方案的实施例中,直线轨道3两端敞开时,则利用墙壁实现行走小车4的拦截。还可以将直线轨道3的两端堵上,从而可以直接控制小车的来回巡检的距离。
48.实施例3:
49.基于实施例1,还包括用于接收无线通信模块54的信号的显示器8,显示器8用于显示灯具2状态。显示器8可以是手机或其他电子设备。可以是服务器,实现无线连接后的数据获取和处理。
50.由上可知,借助现有功能模块产品,将其应用在走廊1顶部的灯具2检查上,代替部分人力工作部分,减轻人工负担,提高智能化程度;系统搭建简单方便,实施容易,功能器件采用市场上现有功能模块实现组合,达到巡检的目的;工作可靠。
51.当然,以上只是本实用新型的典型实例,除此之外,本实用新型还可以有其它多种具体实施方式,凡采用等同替换或等效变换形成的技术方案,均落在本实用新型要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1