信息处理装置以及信息处理方法与流程
1.本发明涉及信息处理装置以及信息处理方法。
背景技术:
2.在专利文献1中,公开有关于车辆位置引导系统的技术,该车辆位置引导系统在对车辆用户引导车辆的位置时,在设置于该车辆的车载终端中使车辆周围监视功能工作。根据该技术,在车辆用户使用通信终端请求车辆位置的引导的情况下,使该车辆的安全系统工作,抑制在对车辆用户引导该车辆的停车位置时用户与可疑者发生碰撞的情形。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2018
‑
156251号公报
技术实现要素:
6.本发明的目的在于提供能够在多个车辆停车的预定的停车区域适合地监视该停车区域的信息处理装置以及信息处理方法。
7.本技术公开的信息处理装置具备控制部,该控制部执行:获取针对在停车有多个车辆的预定的停车区域停车中的停车车辆有无来自外部的预定的输入;从所述停车车辆之中确定被施加了所述预定的输入的车辆即对象车辆;以及根据针对所述对象车辆的所述预定的输入,发出用于启动第一车辆传感器的指令,该第一车辆传感器为设置于第一车辆的传感器,并且被构成为能够检测该第一车辆的周边信息,所述第一车辆是在所述预定的停车区域在所述对象车辆的周围停车的车辆。
8.另外,本技术公开的信息处理装置具备控制部,该控制部执行:在作为在停车有多个车辆的预定的停车区域停车中的预定的车辆的对象车辆中,获取有无来自外部的预定的输入;以及根据针对所述对象车辆的所述预定的输入,发出用于启动第一车辆传感器的指令,该第一车辆传感器为设置于第一车辆的传感器,并且被构成为能够检测该第一车辆的周边信息,所述第一车辆是在所述预定的停车区域在所述对象车辆的周围停车的车辆。
9.另外,本技术公开能够从基于计算机的信息处理方法这方面理解。即,本技术公开的信息处理方法由计算机执行:获取针对在停车有多个车辆的预定的停车区域停车中的停车车辆有无来自外部的预定的输入;从所述停车车辆之中确定被施加了所述预定的输入的车辆即对象车辆;以及根据针对所述对象车辆的所述预定的输入,发出用于启动第一车辆传感器的指令,该第一车辆传感器为设置于第一车辆的传感器,并且被构成为能够检测该第一车辆的周边信息,所述第一车辆是在所述预定的停车区域在所述对象车辆的周围停车的车辆。
10.根据本技术公开,能够在多个车辆停车的预定的停车区域,适合地监视该停车区域。
附图说明
11.图1是示出第1实施方式中的信息处理系统的概略结构的图。
12.图2是更详细地示出第1实施方式中的信息处理系统的构成要素的图。
13.图3是用于说明第1实施方式中的停车场的监视的第1图。
14.图4是用于说明第1实施方式中的停车场的监视的第2图。
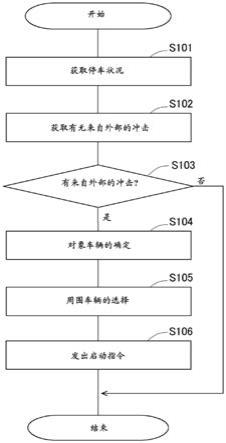
15.图5是关于第1实施方式中的服务器所进行的车载摄像机的启动处理的流程图。
16.图6是将第1实施方式的变形例1中的停车场与信息处理系统的概略结构一起示出的图。
17.图7是用于说明第1实施方式的变形例1中的停车场的监视的图。
18.图8是用于说明第1实施方式的变形例2中的停车场的监视的第1图。
19.图9是用于说明第1实施方式的变形例2中的停车场的监视的第2图。
20.图10是关于第1实施方式的变形例3中的服务器所进行的车载摄像机的启动处理的流程图。
21.图11是更详细地示出第1实施方式的变形例3中的信息处理系统的构成要素的图。
22.图12是用于说明第1实施方式的变形例3中的停车场的监视的第1图。
23.图13是用于说明第1实施方式的变形例3中的停车场的监视的第2图。
24.图14是用于说明第1实施方式的变形例4中的停车场的监视的第1图。
25.图15是用于说明第1实施方式的变形例4中的停车场的监视的第2图。
26.图16是关于第1实施方式的变形例5中的服务器所进行的车载摄像机的启动处理的流程图。
27.图17是更详细地示出第1实施方式的变形例5中的信息处理系统的构成要素的图。
28.图18是用于说明第1实施方式的变形例5中的停车场的监视的图。
29.图19是示出第2实施方式中的信息处理系统的概略结构的图。
30.图20是更详细地示出第2实施方式中的信息处理系统的构成要素的图。
31.图21是用于说明第2实施方式中的停车场的监视的图。
32.图22是关于第2实施方式中的车载装置所进行的车载摄像机的启动处理的流程图。
33.图23是示出第3实施方式中的信息处理系统的概略结构的图。
34.图24是关于第3实施方式中的服务器进行的向用户引导的处理的流程图。
35.图25是用于说明第3实施方式中的停车场的监视的第1图。
36.图26是用于说明第3实施方式中的停车场的监视的第2图。
37.符号说明
38.10:用户;20:便携终端;50:停车场;100:收集装置;200:停车场传感器;300:服务器;301:通信部;302:存储部;303:控制部;304:输入输出部;500:车辆;510:车载装置;520:冲击传感器;530:车载摄像机。
具体实施方式
39.在本技术公开中,控制部获取针对在多个车辆停车的预定的停车区域停车中的停车车辆有无来自外部的预定的输入。在此,来自外部的预定的输入例如是指针对车辆的来
自外部的冲击。并且,当这样从外部对车辆施加冲击时,有可能在该车辆中产生异常。另外,来自外部的预定的输入例如是指来自停车车辆的用户的预定的请求信息。在该请求例如为来自用户的向自己的停车车辆的引导请求的情况下,当假设针对用户的向车辆的引导不恰当时,有可能会损害上述停车区域的安全性。
40.因而,控制部根据针对作为在预定的停车区域停车中的预定的车辆的对象车辆的预定的输入,发出用于启动第一车辆传感器的指令。在此,在本技术公开的信息处理装置为不搭载于车辆的装置的情况下,该装置的控制部从停车车辆之中将被施加预定的输入的车辆确定为对象车辆。另外,在本技术公开的信息处理装置为搭载于车辆的车载装置的情况下,该车载装置的控制部将自己的车辆作为对象车辆而获取有无来自外部的预定的输入。然后,本技术公开的控制部将在预定的停车区域在对象车辆的周围停车的车辆作为第一车辆,启动设置于该第一车辆的第一车辆传感器。在此,第一车辆传感器是被构成为能够检测第一车辆的周边信息的传感器,例如为车载摄像机。
41.这样,根据本技术公开的信息处理装置,根据针对对象车辆的预定的输入,启动停车在对象车辆的周围的第一车辆的第一车辆传感器。于是,在来自外部的预定的输入为针对车辆的来自外部的冲击的情况下,能够由第一车辆传感器准确地掌握从外部对对象车辆施加冲击的状况,因而,能够适合地监视停车场。另外,在来自外部的预定的输入例如为来自用户的向自己的停车车辆的引导请求的情况下,能够由第一车辆传感器将用户10适合地引导到自己的车辆,因而,能够提高停车场的安全性。
42.以下,根据附图,说明本技术公开的实施方式。以下的实施方式的结构为例示,本技术公开不限定于实施方式的结构。
43.<第1实施方式>
44.参照图1,说明第1实施方式的信息处理系统的概要。本实施方式的信息处理系统构成为包括管辖停车场50的收集装置100、包括感测停车场50中的车辆的停车状况的传感器的停车场传感器200以及服务器300。此外,在本实施方式中,如图1所示,作为车辆500,车辆500a至车辆500f这6台车辆停车在停车场50。
45.收集装置100为设置于停车场50的装置,为收集停车场传感器200的检测数据的装置。关于由收集装置100从停车场传感器200进行的数据收集,既可以以一定周期收集在该传感器中临时存储的数据,也可以每次都收集从该传感器以推送式发送来的检测数据。
46.停车场传感器200包括车辆探测传感器。车辆探测传感器为检测在停车场50的各停车位置处停车的车辆500的存在的传感器。车辆探测传感器既可以为红外线式传感器,也可以为超声波式传感器。
47.另外,停车场传感器200也可以包括识别传感器。识别传感器检测停车在停车场50的车辆500的识别信息。详细而言,通过与车辆500进行近距离无线通信,从而检测该车辆500的识别信息。此外,车辆500的识别信息利用预定的应用程序事先登记于车辆500的车载装置510。利用这样的识别传感器也能够感测停车场50中的车辆的停车状况。而且,停车场传感器200所包含的传感器只要能够感测停车场50中的车辆的停车状况,其种类就不被限定。
48.服务器300构成为能够与收集装置100进行通信,获取从收集装置100发送的检测数据。然后,服务器300通过获取从收集装置100发送的检测数据,从而管理停车场50中的车
辆500的停车状况。另外,服务器300构成为能够与车辆500进行通信,能够获取从车辆500发送的数据,并且对车辆500发送预定的指令。
49.在此,服务器300经由网络还与其它服务器连接,构成为能够访问用于确定停车在停车场50的车辆500的数据库。因此,服务器300能够根据从收集装置100发送的检测数据和保存于上述数据库的信息,确定停车在停车场50的车辆500。例如,在使用识别传感器作为停车场传感器200的情况下,服务器300通过将从收集装置100发送的车辆500的识别信息与保存于上述数据库的信息进行对比,从而确定停车在停车场50的车辆500。另外,例如在使用车辆探测传感器作为停车场传感器200的情况下,服务器300根据从收集装置100发送的车辆探测信息、保存于上述数据库的信息、进而从车辆500发送的预定的数据,确定停车在停车场50的车辆500。在该情况下,从车辆500发送位置信息、识别信息等,服务器300通过将从车辆500发送的车辆500的识别信息与保存于上述数据库的信息进行对比,从而确定车辆500,并且通过将从车辆500发送的车辆500的位置信息与从收集装置100发送的车辆探测信息进行对比,从而获取所确定的车辆500的停车位置。
50.然后,服务器300获取针对在停车场50停车中的车辆500有无来自外部的预定的输入。如上所述,服务器300构成为能够与车辆500进行通信,在本实施方式中,当车辆500(例如,图1中的车辆500b)探测到针对该车辆(车辆500b)的来自外部的冲击时,该事实与该车辆(车辆500b)的位置信息、识别信息一起从该车辆(车辆500b)发送到服务器300。然后,服务器300通过获取这样从车辆500发送的数据,从而获取针对车辆500有无来自外部的预定的输入。进而,服务器300根据从车辆500发送的数据和存储于其它服务器的车辆信息,从在停车场50停车中的车辆500之中确定被施加了预定的输入的对象车辆(车辆500b)。
51.这样,获取针对车辆500施加了预定的输入这一情况、并且确定出该车辆的服务器300对在停车场50中在被施加了预定的输入的对象车辆(车辆500b)的周围停车的周围车辆(车辆500a、车辆500c、车辆500d、车辆500e以及车辆500f)发送预定的指令。在此,车辆500设置有构成为能够检测该车辆500的周边信息的传感器,服务器300发出用于启动上述周围车辆的该传感器的指令。此外,上述传感器例如为构成行车记录仪的车载摄像机,但不意图限定于此,上述传感器只要能够感测车辆500的周边信息,其种类就不被限定。
52.接下来,根据图2,主要进行服务器300的构成要素的详细说明。图2是更详细地示出第1实施方式中的信息处理系统所包含的服务器300的构成要素,并且示出与服务器300进行通信的车辆500的构成要素的图。
53.服务器300也可以由通用的计算机构成。即,服务器300能够作为具有cpu、gpu等处理器、ram、rom等主存储装置、eprom、硬盘驱动器、可移动介质等辅助存储装置的计算机而构成。此外,可移动介质例如也可以为usb存储器或者如cd、dvd那样的盘记录介质。在辅助存储装置中,保存有操作系统(os)、各种程序、各种表格等。服务器300作为功能部而具有通信部301、存储部302、控制部303、输入输出部304,将保存于辅助存储装置的程序载入到主存储装置的作业区域而执行,通过程序的执行来控制各功能部等,从而能够实现与各功能部中的预定的目的相符合的各功能。其中,一部分或者全部的功能也可以由如asic、fpga那样的硬件电路实现。
54.在此,通信部301为用于将服务器300与网络连接的通信接口。通信部301例如构成为包括网络接口板、用于无线通信的无线通信电路。服务器300经由通信部301而与车辆
500、其它外部装置能够通信地连接。
55.存储部302构成为包括主存储装置和辅助存储装置。主存储装置为展开由控制部303执行的程序、该控制程序利用的数据的存储器。辅助存储装置为存储在控制部303中执行的程序、该控制程序利用的数据的装置。
56.进而,存储部302存储从收集装置100发送的检测数据和与从车辆500发送的车辆信息有关的数据。此外,服务器300经由通信部301获取这些数据。在此,存储于存储部302的检测数据例如是指由车辆探测传感器检测到的车辆探测信息。另外,与存储于存储部302的车辆信息有关的数据例如是指从车辆500发送的该车辆的位置信息、识别信息等。
57.控制部303为掌管服务器300进行的控制的功能部。控制部303能够由cpu等运算处理装置实现。控制部303构成为还具有停车状况管理部3031、输入获取部3032、对象车辆确定部3033、选择部3034以及启动指令部3035这5个功能部。各功能部也可以通过由cpu执行所存储的程序而实现。
58.停车状况管理部3031根据从收集装置100发送并存储于存储部302的停车场50中的车辆的探测信息,管理停车场50中的车辆的停车状况。在此,车辆的停车状况例如是指与停车场50的各停车位置处有无停车车辆有关的状况。进而,停车状况管理部3031在存在停车车辆的情况下,根据与从车辆500发送并存储于存储部302的该停车车辆的车辆信息有关的数据,确定在停车场50的各停车位置处停车的车辆500,从而管理停车场50中的车辆的停车状况。如上所述,在与存储于存储部302的车辆信息有关的数据中,包含从车辆500发送的该车辆的位置信息、识别信息等。另外,服务器300经由网络而与其它服务器连接,构成为能够访问用于确定车辆的数据库。因而,停车状况管理部3031通过将停车在停车场50的车辆500的识别信息与存储于其它服务器的车辆信息进行对比,能够确定车辆500。另外,停车状况管理部3031通过将停车在停车场50的车辆500的位置信息与停车场50中的车辆的探测信息进行对比,能够管理所确定的车辆500的停车位置。
59.输入获取部3032根据在车辆500探测到冲击时从该车辆500发送到服务器300的数据,获取针对车辆500有无来自外部的冲击。关于该动作,以下与车辆500的构成要素一起进行说明。
60.车辆500构成为包括车载装置510、冲击传感器520以及车载摄像机530。车载装置510作为功能部而具有通信部511、位置检测部512以及存储部513,但也可以构成为具有除了这些以外的功能部。通信部511为用于将车辆500与网络连接的通信接口,例如,构成为包括网络接口板、用于无线通信的无线通信电路。位置检测部512为用于检测车辆500的位置的功能部,例如形成为具有gps装置。存储部513与服务器300的存储部302同样地构成为包括主存储装置和辅助存储装置,在存储部513中存储车辆500的识别信息。此外,该识别信息通过预定的应用程序事先被登记。
61.冲击传感器520为探测作用于车辆500的冲击而输出探测信号的机械式或者电子式传感器,例如设置于车辆500的车体。作为冲击传感器520的一个例子,可举出加速度传感器,此时,冲击传感器520将在处于停车中的车辆500中产生的加速度探测为冲击,输出探测信号。此外,冲击传感器520不限定于此,可使用公知的结构。
62.另外,车载摄像机530例如为使用了充电耦合设备(charged-coupled devices(ccd))、金属氧化物半导体(metal-oxide-semiconductor(mos))或者互补金属氧化物半
导体(complementary metal-oxide-semiconductor(cmos))等图像传感器的摄影装置,能够根据图像(静态图像或者动态图像)来检测车辆500的前方以及后方的状况。此外,在车辆500行驶中由车载摄像机530检测到的图像被存储于存储部513,从而能够构成所谓的行车记录仪。
63.然后,返回到图2,服务器300的控制部303所具有的输入获取部3032通过经由通信部301获取由设置于车辆500的冲击传感器520输出的探测信号,能够获取针对车辆500有无来自外部的冲击。此外,此时,输入获取部3032还将由设置于车辆500的冲击传感器520输出的探测信号与该车辆500的位置信息、识别信息一起获取。
64.对象车辆确定部3033从停车在停车场50的车辆500之中确定作为被施加来自外部的冲击的车辆的对象车辆。如上所述,由输入获取部3032获取针对车辆500中的某个车辆的冲击的探测和该车辆的位置信息、识别信息。于是,对象车辆确定部3033通过将这样获取到的数据与由停车状况管理部3031管理的停车场50的停车状况进行对比,能够从车辆500之中确定对象车辆。
65.选择部3034选择在停车场50中停车在对象车辆的周围的车辆即周围车辆。另外,启动指令部3035为发出用于启动由选择部3034选择的周围车辆的车载摄像机530的指令的功能部。根据图3以及图4,说明该情况。
66.图3是用于说明第1实施方式中的停车场50的监视的第1图。在图3所示的停车场50,未设置停车场设置型监视摄像机。在该情况下,即使从外部对在停车场50停车中的车辆500施加了冲击,也难以准确地掌握其状况。因而,考虑使用设置于车辆500的车载摄像机530来监视停车场50。例如,设想某人对图3所示的车辆500b施加冲击,从外部被施加了冲击的对象车辆500b的车载摄像机530被启动的情况。在该情况下,尽管以从对象车辆500b的车载摄像机530的视野对该车辆500b的周边进行拍摄,但仍难以获取以包括该车辆500b在内的视野拍摄到的图像信息,难以准确地掌握由谁施加了冲击的状况。
67.因而,在本实施方式中,如图4所示,在对象车辆的周围停车的周围车辆的车载摄像机530被启动。图4是用于说明第1实施方式中的停车场50的监视的第2图。在本实施方式中,服务器300的控制部303所具有的输入获取部3032获取到针对在停车场50停车中的车辆500有来自外部的冲击这一情况。然后,对象车辆确定部3033从车辆500之中确定被施加了来自外部的冲击的对象车辆500b。然后,选择部3034作为启动车载摄像机530的车辆,不选择对象车辆500b,而选择在该车辆500b的周围停车的周围车辆500a、500c、500d、500e以及500f。也就是说,在本实施方式中,在停车场50停车的车辆500中的、除了对象车辆500b之外的其它所有的车辆被选择为周围车辆。选择部3034能够根据由停车状况管理部3031管理的停车场50的停车状况,选择周围车辆。此外,也可以不论选择部304的选择处理如何,都利用车辆500b的车载摄像机530来进行摄像。
68.然后,启动指令部3035发出用于启动这样由选择部3034选择的周围车辆500a、500c、500d、500e以及500f的车载摄像机530的指令。于是,由这些车载摄像机530对周围车辆的周边进行拍摄,易于获取以包括对象车辆500b在内的视野拍摄到的图像信息。也就是说,即使假设从外部对在停车场50停车中的车辆500施加了冲击,也能够准确地掌握其状况,因而,能够适合地监视停车场50。此外,在该情况下,周围车辆500a、500c、500d、500e以及500f相当于本发明的第一车辆,这些周围车辆的车载摄像机530相当于本发明的第一车
辆传感器。
69.此外,控制部303执行停车状况管理部3031、输入获取部3032、对象车辆确定部3033、选择部3034以及启动指令部3035的处理,从而作为本发明的控制部发挥功能。然后,服务器300作为本发明的信息处理装置发挥功能。
70.接下来,输入输出部304为用于进行信息的输入输出的接口。输入输出部304例如构成为具有显示器装置、触摸面板。输入输出部304也可以包括键盘、近距离通信单元、触摸屏等。
71.在此,根据图5所示的流程图,说明由服务器300进行的车载摄像机530的启动处理。由控制部303执行该启动处理。首先,在s101中,获取停车场50的停车状况。控制部303例如根据从收集装置100发送并存储于存储部302的车辆探测信息和与从车辆500发送并存储于存储部302的车辆信息有关的数据和用于确定存储于其它服务器的车辆的数据,获取停车场50中的车辆500的停车状况。当s101的处理结束时,进入到s102。
72.在s102中,获取针对车辆500有无来自外部的冲击。控制部303通过经由通信部301获取由设置于车辆500的冲击传感器520输出的探测信号,从而获取针对车辆500有无来自外部的冲击。然后,在s103中,针对车辆500判别是否有来自外部的冲击。当在s103中做出肯定判定时,处理进入到s104,当在s103中做出否定判定时,结束本流程的执行。
73.当在s103中做出肯定判定的情况下,接下来,在s104中,从停车在停车场50的车辆500之中确定被施加了来自外部的冲击的对象车辆。控制部303根据在s101的处理中获取到的停车场50中的车辆500的停车状况和在s102的处理中获取到的数据(在该数据中包含冲击传感器520的探测信号、车辆的位置信息、识别信息。),从车辆500之中确定对象车辆。然后,当s104的处理结束时,进入到s105。
74.在s105中,选择停车在由s104的处理确定的对象车辆的周围的周围车辆。控制部303根据在s101的处理中获取到的停车场50中的车辆500的停车状况,选择周围车辆。此外,如上所述,在本实施方式中,停车在停车场50的车辆500中的、除了对象车辆之外的其它所有的车辆被选择为周围车辆。
75.接下来,在s106中,发出用于启动设置于在s105的处理中所选择的周围车辆的车载摄像机530的指令。也就是说,控制部303根据针对车辆500的来自外部的冲击,发出用于启动设置于在s105的处理中所选择的周围车辆的车载摄像机530的指令。
76.这样,当根据针对车辆500的来自外部的冲击启动设置于周围车辆的车载摄像机530时,能够准确地掌握从外部对对象车辆施加冲击的状况,因而,能够适合地监视停车场50。
77.此外,以上叙述的停车场50为预先决定有作为用于使车辆500停车的空间的各停车位置的停车场,但本发明的停车区域不限定于此。例如,本发明的停车区域可以是虽然存在用于使车辆500停车的空间但其位置未被预先决定的河岸地。即使在这样的情况下,当在河岸地停车多个车辆500时,根据针对车辆500的来自外部的冲击而启动设置于周围车辆的车载摄像机530,从而也能够适合地监视该停车区域。
78.<第1实施方式的变形例1>
79.根据图6以及图7,说明上述第1实施方式的第1变形例。图6是将本变形例中的停车场50与信息处理系统的概略结构一起示出的图。本变形例的信息处理系统与上述第1实施
方式同样地,构成为包括收集装置100、停车场传感器200以及服务器300。
80.在上述第1实施方式中,以停车在停车场50的车辆500的台数比较少的情况为例而叙述了说明。相对于此,在本变形例中,以停车在停车场50的车辆500的台数比较多的情况为例,叙述说明。
81.如图6所示,在本变形例中,在停车场50停车有比较多的车辆500。而且,当设想在这样的状况下从外部对图6所示的车辆500a施加了冲击的情况时,根据上述第1实施方式,停车在停车场50的车辆500中的、除了车辆500a之外的其它所有的车辆被选择为周围车辆。于是,停车在车辆500a的周围的大量的周围车辆的车载摄像机530被启动,易于获取宽范围地拍摄停车场50而得到的图像信息,而另一方面,服务器300的处理负担有时增加。
82.因而,在本变形例中,服务器300的控制部303所具有的选择部3034将停车在停车场50的车辆500中的、在包括被施加了来自外部的冲击的对象车辆在内的预定的范围停车的车辆选择为周围车辆。根据图7,说明该情况。
83.图7是用于说明本变形例中的停车场50的监视的图。在本变形例中,输入获取部3032获取针对在停车场50停车中的车辆500有来自外部的冲击这一情况,对象车辆确定部3033从车辆500之中确定被施加了来自外部的冲击的对象车辆500a。然后,如图7所示,选择部3034将停车在停车场50的车辆500中的、在包括对象车辆500a在内的预定的范围停车的车辆500b~车辆500h选择为周围车辆。在此,本变形例中的预定的范围是指与对象车辆500a的侧方相邻的停车位置(在该停车位置处停车有车辆500e和车辆500g),与对象车辆500a的后方相邻的停车位置(在该停车位置处停车有车辆500c)、与对象车辆500a的斜后方相邻的停车位置(在该停车位置处停车有车辆500f和车辆500h)以及对象车辆500a的对面的停车位置(在该停车位置处停车有车辆500b)。进而,在本变形例中的预定的范围包括在作为对象车辆500a的行进方向的纵向面向与对象车辆500a的后方相邻的停车位置的停车位置(在该停车位置处停车有车辆500d)。然后,选择部3034能够根据由停车状况管理部3031管理的停车场50的停车状况,选择在上述停车位置处停车的周围车辆500b~500h。
84.然后,在设置于这样选择的周围车辆的车载摄像机530被启动的情况下,能够准确地掌握从外部对对象车辆施加冲击的状况,并且降低服务器300的处理负担。
85.<第1实施方式的变形例2>
86.根据图8以及图9,说明上述第1实施方式的第2变形例。本变形例中的停车场50与上述第1实施方式的变形例1同样地为停车了比较多的车辆500的停车场。而且,在本变形例的信息处理系统中,停车场传感器200构成为包括设置型摄像机。
87.在此,停车场传感器200所包含的设置型摄像机例如为使用了充电耦合设备(charged-coupled devices(ccd))、金属氧化物半导体(metal-oxide-semiconductor(mos))或者互补金属氧化物半导体(complementary metal-oxide-semiconductor(cmos))等图像传感器的摄影装置,能够根据图像(静态图像或者动态图像)来检测停车场50的状况。
88.然后,在本变形例中,根据由设置于停车场50的设置型摄像机拍摄到的图像信息,选择周围车辆。根据图8,说明该情况。
89.图8是用于说明本变形例中的停车场50的监视的第1图。在本变形例中,与上述第1实施方式的变形例1同样地,服务器300的控制部303所具有的选择部3034将停车在停车场
50的车辆500中的、在包括对象车辆500a在内的预定的范围停车的车辆选择为周围车辆。此时,选择部3034根据由停车状况管理部3031管理的停车场50的停车状况和由设置于停车场50的设置型摄像机拍摄到的图像信息,选择周围车辆。于是,例如,如图8所示,由选择部3034将与对象车辆500a在作为该车辆500a的行进方向的纵向上排列地停车的车辆500b~车辆500d选择为周围车辆。此外,由设置型摄像机拍摄到的图像信息由收集装置100收集,从该收集装置100发送到服务器300。然后,选择部3034经由通信部301获取由设置型摄像机拍摄到的图像信息。另外,在该情况下,设置于停车场50的设置型摄像机相当于本发明的设置型传感器。
90.在此,如上所述,车载摄像机530能够根据图像(静态图像或者动态图像)来检测车辆500的前方以及后方的状况。于是,在设置于如上所述选择的周围车辆的车载摄像机530被启动的情况下,易于由与车辆500a在纵向上排列地停车的周围车辆500b~500d的车载摄像机530获取以包括对象车辆500a在内的视野拍摄到的图像信息。换言之,选择部3034根据由设置于停车场50的设置型摄像机拍摄到的图像信息,将在能够由车载摄像机530以包括对象车辆500a在内的视野进行拍摄的位置处停车的车辆选择为周围车辆。由此,能够准确地掌握从外部对对象车辆施加冲击的状况。
91.此外,上述说明了作为能够检测车辆500的周边信息的传感器(本发明的第一车辆传感器)而使用车载摄像机530的例子,但该传感器只要能够感测车辆500的周边信息,其种类就不被限定。例如,作为能够检测车辆500的周边信息的传感器(本发明的第一车辆传感器),还能够使用构成为能够探测人的存在的人感传感器。此外,人感传感器既可以为红外线式传感器,也可以为超声波式传感器。根据图9,说明该情况。
92.图9是用于说明本变形例中的停车场50的监视的第2图。在图9所示的例子中,选择部3034根据由停车状况管理部3031管理的停车场50的停车状况,将在对象车辆500a的周围相邻地停车的车辆500b~500f选择为周围车辆,启动指令部3035发出用于启动该周围车辆的人感传感器的指令。于是,在对象车辆500a的周围相邻地停车的车辆的人感传感器被启动。在该情况下,服务器300从车辆500获取由人感传感器探测到的信号,从而推测对车辆500a施加了冲击的人的当前位置。然后,服务器300对设置于停车场50的设置型摄像机发出对推测出的上述当前位置进行拍摄的指令。其结果,能够获取对车辆500a施加了冲击的人的图像信息。在此,设置于停车场50的设置型摄像机构成为拍摄范围可变,能够根据来自外部的指令来变更其拍摄范围。另外,从服务器300向设置型摄像机的指令经由构成为能够与该服务器300进行通信的收集装置100传递。通过以上,也能够准确地掌握从外部对对象车辆施加冲击的状况。
93.<第1实施方式的变形例3>
94.根据图10~图13,说明上述第1实施方式的第3变形例。图10是关于本变形例中的服务器300所进行的车载摄像机530的启动处理的流程图。该启动处理由控制部303执行。此外,在图10所示的各处理中,关于与上述图5所示的处理实质上相同的处理,附加相同的符号,省略其详细的说明。另外,本变形例中的停车场50也与上述第1实施方式的变形例1同样地为停车有比较多的车辆500的停车场。
95.在本变形例中,当s104的处理结束时,接下来,在s201中,发出用于启动设置于在s104的处理中确定的对象车辆的车载摄像机530的指令。然后,当s201的处理结束时,进入
到s202,在s202中,获取由对象车辆的车载摄像机530拍摄到的图像信息。在此,根据更详细地示出本变形例中的服务器300的构成要素的图11,服务器300的控制部303所具有的对象车辆确定部3033作为功能部而具有对象车辆指令部30331和图像信息获取部30332。在s201的处理中,对象车辆指令部30331发出用于启动设置于对象车辆的车载摄像机530的指令。另外,在s202的处理中,图像信息获取部30332获取由对象车辆的车载摄像机530拍摄到的图像信息。在此,图像信息获取部30332能够经由通信部301获取从对象车辆发送的图像信息。然后,当s202的处理结束时,进入到s105。
96.在此,根据图12,说明上述处理。图12是用于说明本变形例中的停车场50的监视的第1图。在本变形例中,通过s104的处理,图12所示的车辆500a被确定为对象车辆。然后,当通过s201的处理发出用于启动设置于对象车辆500a的车载摄像机530的指令时,由该车载摄像机530在纵向(对象车辆500a的行进方向)上对该对象车辆500a的周边进行拍摄。然后,服务器300的控制部303获取这样拍摄到的图像信息(s202的处理)。此外,在该图像信息中,包含与对象车辆500a在纵向上排列地停车的车辆500b~车辆500d。另外,在该情况下,对象车辆500a的车载摄像机530相当于本发明的对象车辆传感器。
97.然后,在s105中,控制部303根据在s202的处理中获取到的由对象车辆500a的车载摄像机530拍摄到的图像信息来选择周围车辆。然后,在s106中,发出用于启动设置于在s105的处理中所选择的周围车辆的车载摄像机530的指令。根据图13,说明该情况。图13是用于说明本变形例中的停车场50的监视的第2图。根据图13,与对象车辆500a在纵向上排列地停车的车辆500b~车辆500d被选择为周围车辆。于是,易于由这些周围车辆500b~车辆500d的车载摄像机530获取以包括对象车辆500a在内的视野拍摄到的图像信息。由此,能够准确地掌握从外部对对象车辆施加冲击的状况。
98.<第1实施方式的变形例4>
99.根据图14以及图15,说明上述第1实施方式的第4变形例。本变形例中的服务器300按照与上述第1实施方式的变形例3同样的次序执行车载摄像机530的启动处理。也就是说,在本变形例中,也当上述图10所示的s104的处理结束时,接下来,在s201中,发出用于启动设置于在s104的处理中确定的对象车辆的车载摄像机530的指令,在s202中,获取由对象车辆的车载摄像机530拍摄到的图像信息。然后,在s105中,根据在s202的处理中获取到的由对象车辆的车载摄像机530拍摄到的图像信息来选择周围车辆,在s106中,发出用于启动设置于在s105的处理中所选择的周围车辆的车载摄像机530的指令。
100.在此,根据图14,说明上述处理。图14是用于说明本变形例中的停车场50的监视的第1图。根据图14,与上述图12不同,车辆未在对象车辆500a的对面停车。于是,有可能即使启动设置于周围车辆(图14所示的车辆500b~车辆500d)的车载摄像机530,也难以准确地获取以包括对象车辆500a在内的视野拍摄到的图像信息。
101.因而,在本变形例中,服务器300的控制部303在上述图10所示的s106的处理中将用于启动车载摄像机530的指令与用于使预定的周围车辆移动的指令一起发出。根据图15,说明该情况。图15是用于说明本变形例中的停车场50的监视的第2图。根据图15,周围车辆500b~车辆500d中的车辆500b根据来自服务器300的指令进行移动。详细而言,服务器300的控制部303对车辆500b发出使该车辆500b位于对象车辆500a的对面的移动指令。在此,停车在停车场50的车辆500为构成为能够自主行驶的自主行驶车辆,能够根据来自外部的指
令来自主行驶。其结果,易于由周围车辆500b~车辆500d的车载摄像机530获取以包括对象车辆500a在内的视野拍摄到的图像信息,因而,能够准确地掌握从外部对对象车辆施加冲击的状况。
102.<第1实施方式的变形例5>
103.根据图16~图18,说明上述第1实施方式的第5变形例。图16是关于本变形例中的服务器300所进行的车载摄像机530的启动处理的流程图。该启动处理由控制部303执行。此外,在图16所示的各处理中,关于与上述图5所示的处理实质上相同的处理,附加相同的符号,省略其详细的说明。另外,本变形例中的停车场50也与上述第1实施方式的变形例1同样地为停车有比较多的车辆500的停车场。
104.在本变形例中,当s106的处理结束时,接下来,在s301中,获取由在s106的处理中被启动的周围车辆的车载摄像机530拍摄到的图像信息。在此,根据更详细地示出本变形例中的服务器300的构成要素的图17,服务器300的控制部303所具有的选择部3034作为功能部而具有图像信息获取部30341。在s301的处理中,图像信息获取部30341获取由周围车辆的车载摄像机530拍摄到的图像信息。在此,图像信息获取部30341能够经由通信部301获取从周围车辆发送的图像信息。此外,在以下的说明中,将在s105的处理中所选择的周围车辆称为第一周围车辆。
105.接下来,在s302中,根据由在s301的处理中获取到的第一周围车辆的车载摄像机530拍摄到的图像信息,选择第二周围车辆。在此,第二周围车辆是指停车在停车场50的车辆500中的与对象车辆以及第一周围车辆不同的、并且停车在该第一周围车辆的周围的车辆。然后,当s302的处理结束时,接下来,在s303中,发出用于启动设置于在s302的处理中所选择的第二周围车辆的车载摄像机530的指令。根据上述图7以及图18,说明该情况。
106.在本变形例中,服务器300的控制部303在s106的处理中发出用于启动设置于第一周围车辆的车载摄像机530的指令。这通过上述图7来例示,根据图7,设置于停车在停车场50的车辆500中的、在包括对象车辆500a在内的预定的范围停车的第一周围车辆500b~500h的车载摄像机530启动。于是,能够获取以包括对象车辆500a在内的视野拍摄到的图像信息,能够获取对该车辆500a施加了冲击的人的图像信息。在此,设想对车辆500a施加冲击的人之后在停车场50内移动的情况。在该情况下,对车辆500a施加了冲击的人移动,所以可能发生该人脱离设置于第一周围车辆500b~500h的车载摄像机530的拍摄范围的情形。
107.因而,在本变形例中,服务器300的控制部303在s302的处理中,根据由第一周围车辆500b~500h的车载摄像机530拍摄到的图像信息,选择第二周围车辆。在此,图18是用于说明本变形例中的停车场50的监视的图。根据图18,对对象车辆500a施加了冲击的人按照箭头a所示的路径进行移动。在该情况下,控制部303使用由第一周围车辆500b~500h的车载摄像机530拍摄到的图像信息,辨识对车辆500a施加了冲击的人的移动路径,之后也以能够监视该人的移动的方式,将车辆500i以及车辆500j选择为第二周围车辆。然后,控制部303在s303的处理中,发出用于启动设置于第二周围车辆500i以及500j的车载摄像机530的指令。其结果,即使对车辆500a施加了冲击的人在停车场50内移动,也能够获取该人的图像信息。此外,在该情况下,第二周围车辆500i以及500j相当于本发明的第二车辆,这些第二周围车辆的车载摄像机530相当于本发明的第二车辆传感器。
108.<第2实施方式>
109.根据图19~图22,说明第2实施方式。图19是将本实施方式中的停车场50与信息处理系统的概略结构一起示出的图。图20是更详细地示出信息处理系统所包含的车辆500的车载装置510的构成要素的图。此外,在本实施方式中,如图19所示,车辆500a至车辆500f作为车辆500在停车场50停车,车辆500a至车辆500f具有车载装置510a至车载装置510f。
110.而且,在本实施方式中,被构成为在停车场50停车中的车辆500彼此能够通信,能够在车辆间收发数据,并且能够从一个车辆对另一个车辆发送预定的指令。
111.车辆500的车载装置510作为功能部,除了具有上述通信部511、位置检测部512、存储部513之外,还具有控制部514。在此,控制部514为掌管车载装置510进行的控制的功能部。控制部514能够由cpu等运算处理装置实现。控制部514构成为还具有停车状况管理部5141、输入获取部5142、选择部5143以及启动指令部5144这4个功能部。各功能部也可以通过由cpu执行所存储的程序而实现。此外,在控制部514中执行的程序、该控制程序利用的数据存储于存储部513的辅助存储装置。另外,存储部513的主存储装置作为展开由控制部514执行的程序、该控制程序利用的数据的存储器发挥功能。
112.停车状况管理部5141根据从停车在停车场50的其它车辆500发送的数据,管理停车场50中的车辆的停车状况。在此,在从其它车辆500发送的数据中包含该车辆的位置信息、识别信息等。另外,车载装置510经由网络而与其它服务器连接,构成为能够访问用于确定车辆的数据库。因而,停车状况管理部5141通过将停车在停车场50的其它车辆500的识别信息与存储于其它服务器的车辆信息对比,能够确定该车辆。另外,停车状况管理部5141能够根据停车在停车场50的其它车辆500的位置信息,管理该车辆的停车位置。
113.输入获取部5142获取针对自己的车辆有无来自外部的冲击。如上所述,车辆500构成为包括冲击传感器520。因而,输入获取部5142通过获取由设置于自己的车辆的冲击传感器520输出的探测信号,能够获取针对自己的车辆有无来自外部的冲击。
114.选择部5143选择在停车场50中被施加了来自外部的冲击的自己的车辆(对象车辆)的周围停车的车辆即周围车辆。另外,启动指令部5144为发出用于启动由选择部5143选择的周围车辆的车载摄像机530的指令的功能部。
115.在本实施方式中,如图21所示,停车在对象车辆510b的周围的周围车辆500a、500c、500d、500e以及500f的车载摄像机530被启动。图21是用于说明第2实施方式中的停车场50的监视的图。在本实施方式中,对象车辆510b的控制部514所具有的输入获取部5142获取针对自己的车辆510b有来自外部的冲击这一情况。然后,选择部5143作为启动车载摄像机530的车辆,选择停车在对象车辆500b的周围的周围车辆500a、500c、500d、500e以及500f。此外,选择部5143能够根据由停车状况管理部5141管理的停车场50的停车状况,选择周围车辆。
116.然后,启动指令部5144发出用于启动这样由选择部5143选择的周围车辆500a、500c、500d、500e以及500f的车载摄像机530的指令。于是,由这些车载摄像机530对周围车辆的周边进行拍摄,易于获取以包括对象车辆500b在内的视野拍摄到的图像信息。此外,在该情况下,周围车辆500a、500c、500d、500e以及500f相当于本发明的第一车辆,这些周围车辆的车载摄像机530相当于本发明的第一车辆传感器。
117.此外,控制部514执行停车状况管理部5141、输入获取部5142、选择部5143以及启动指令部5144的处理,从而作为本发明的控制部发挥功能。然后,车载装置510作为本发明
的信息处理装置发挥功能。
118.在此,根据图22所示的流程图,说明由车载装置510进行的车载摄像机530的启动处理。该启动处理由控制部514执行。首先,在s401中,获取停车场50的停车状况。控制部514根据从停车在停车场50的其它车辆500发送的数据,获取停车场50中的车辆500的停车状况。当s401的处理结束时,进入到s402。
119.在s402中,获取针对车辆500有无来自外部的冲击。控制部514通过获取由设置于自己的车辆500的冲击传感器520输出的探测信号,从而获取针对自己的车辆有无来自外部的冲击。然后,在s403中,判别针对自己的车辆而是否有来自外部的冲击。当在s403中做出肯定判定时,处理进入到s404,当在s403中做出否定判定时,结束本流程的执行。
120.当在s403中做出肯定判定的情况下,接下来,在s404中,选择在被施加了来自外部的冲击的自己的车辆(对象车辆)的周围停车的周围车辆。控制部514根据在s401的处理中获取到的停车场50中的车辆500的停车状况,选择周围车辆。
121.接下来,在s405中,发出用于启动设置于在s404的处理中所选择的周围车辆的车载摄像机530的指令。也就是说,控制部514根据针对自己的车辆的来自外部的冲击,发出用于启动设置于在s404的处理中所选择的周围车辆的车载摄像机530的指令。
122.这样,当根据针对车辆500的来自外部的冲击而启动设置于周围车辆的车载摄像机530时,能够准确地掌握从外部对该车辆施加了冲击的状况,因而,能够适合地监视停车场50。
123.<第3实施方式>
124.根据图23~图26,说明第3实施方式。图23是将本实施方式中的停车场50与信息处理系统的概略结构一起示出的图。本实施方式的信息处理系统除了包括上述第1实施方式所示的结构之外,还包括车辆500的用户10的便携终端20。
125.在上述第1实施方式中,根据作为针对车辆500的来自外部的预定的输入的、针对车辆500的来自外部的冲击,启动设置于周围车辆的车载摄像机530。另一方面,在本实施方式中,根据作为针对车辆500的来自外部的预定的输入的、来自车辆500的用户10的预定的请求信息,启动设置于周围车辆的车载摄像机530。以下,说明该情况。
126.如图23所示,在停车场50停车有比较多的车辆500。于是,对于车辆500的用户10而言,可能难以从很多的车辆500之中寻找自己的车辆。在这样的情况下,只要能够通过监视停车场50将用户10适合地引导到自己的车辆,就能够提高该用户的便利性,并且能够提高停车场50的安全性。因而,在本实施方式中,根据来自车辆500的用户10的引导请求,启动设置于周围车辆的车载摄像机530,并且对使用了该周围车辆的用户10执行引导。
127.图24是关于本实施方式中的服务器300所进行的向用户10的引导的处理的流程图。该引导处理由服务器300的控制部303执行。首先,在s501中,获取停车场50的停车状况。s501的处理与上述图5所示的s101的处理实质上相同。然后,当s501的处理结束时,进入到s502。
128.在s502中,获取有无来自车辆500的用户10的引导请求。然后,在s503中,判别是否有来自用户10的引导请求。当在s503中做出肯定判定时,处理进入到s504,当在s503中做出否定判定时,本流程的执行结束。
129.在此,服务器300经由通信部301而与用户10的便携终端20能够通信地连接。另外,
用户10使用便携终端20请求向自己的车辆的引导。然后,控制部303通过经由通信部301获取从便携终端20发送的引导请求,从而获取有无来自用户10的引导请求。此外,便携终端20作为功能部而具有通信部21、输入输出部22、位置检测部23。通信部21为用于将便携终端20与网络连接的通信接口,例如构成为包括网络接口板、用于无线通信的无线通信电路。输入输出部22为用于使经由通信部21从外部发送来的信息等显示或者在经由通信部21将信息发送到外部时输入该信息的功能部,例如构成为具有显示器装置、触摸面板。位置检测部23为用于检测便携终端20的位置的功能部,例如形成为具有gps装置。
130.当在s503中做出肯定判定的情况下,接下来,在s504中,从停车在停车场50的车辆500之中确定有来自用户10的引导请求的对象车辆。控制部303根据在s101的处理中获取到的停车场50中的车辆500的停车状况和在s502的处理中获取到的数据(在该数据中包含用户10的位置信息、识别信息。),从车辆500之中确定对象车辆。在此,服务器300经由网络而与其它服务器也连接,构成为能够访问用于将用户信息与车辆信息关联起来的数据库。因而,控制部303能够在确定对象车辆时,使用保存于上述数据库的信息。然后,当s504的处理结束时,进入到s505。
131.在s505中,选择在s504的处理中确定出的对象车辆的周围停车的周围车辆。s505的处理与上述图5所示的s105的处理实质上相同。接下来,在s506中,发出用于启动设置于在s505的处理中所选择的周围车辆的车载摄像机530的指令。也就是说,控制部303根据来自车辆500的用户10的引导请求,发出用于启动设置于在s505的处理中所选择的周围车辆的车载摄像机530的指令。于是,例如,如图25所示,在包括对象车辆500a在内的预定的范围停车的周围车辆500b~车辆500h的车载摄像机530被启动。此外,图25是用于说明本实施方式中的停车场50的监视的第1图。然后,当s506的处理结束时,进入到s507。
132.在s507中,获取由在s506的处理中被启动的周围车辆的车载摄像机530拍摄到的图像信息。控制部303能够经由通信部301获取从周围车辆发送的图像信息。
133.接下来,在s508中,根据由在s507的处理中获取到的周围车辆的车载摄像机530拍摄到的图像信息,选择导引车辆。在此,导引车辆是指停车在停车场50的车辆500中的、在能够将用户10导引到直至对象车辆为止的引导路径的位置处停车的车辆。然后,当s508的处理结束时,接下来,在s509中,发出用于启动设置于在s508的处理中所选择的导引车辆的导引单元的指令。根据图26,说明该情况。
134.图26是用于说明本实施方式中的停车场50的监视的第2图。在此,在图26中,用箭头b表示针对用户10的直至对象车辆500a为止的引导路径。然后,控制部303根据由上述图25所示的周围车辆500b~500h的车载摄像机530拍摄到的图像信息来获取该引导路径。于是,在本实施方式中,在引导路径上对面的车辆500i、500j、500f以及500k被选择为导引车辆。另外,与对象车辆500a对面的车辆500b被选择为导引车辆。此外,在该情况下,导引车辆500b、500i、500j、500f以及500k相当于本发明的第三车辆。
135.而且,在本实施方式中,车辆500作为导引单元而具有头灯540。于是,通过上述处理,车辆500b、500i、500j、500f以及500k的头灯540b、540i、540j、540f以及540k启动。
136.这样,当根据来自车辆500的用户10的引导请求而启动设置于周围车辆的车载摄像机530时,能够根据由该车载摄像机530拍摄到的图像信息、也就是说监视停车场50而得到的图像信息,获取引导路径。然后,使用根据引导路径而选择的导引车辆将用户10引导到
自己的车辆,从而能够提高该用户的便利性。
137.另外,用户10根据监视在上述中叙述的停车场50而得到的图像信息而被导引到自己的车辆,从而停车场50的安全性尽可能变高。服务器300的控制部303在获取针对用户10的引导路径时,使用以包括用户10的车辆在内的视野拍摄到的停车场50的监视图像,所以能够决定在向用户10的引导中途该用户与其它车辆500触碰的可能性小的引导路径。于是,尽可能抑制由用户10意外地从外部对他人的车辆500施加冲击的情形。也就是说,使停车场50的安全性尽可能变高。而且,这样能够提高停车场50的安全性,从而能够适合地监视停车场50。
138.<其它变形例>
139.上述实施方式仅仅是一个例子,本公开能够在不脱离其要旨的范围内适当地变更而实施。例如,在本公开中说明的处理、单元只要不产生技术上的矛盾,就能够自由地组合实施。
140.另外,设为由1个装置进行而说明的处理也可以由多个装置分担地执行。例如,也可以使停车状况管理部3031以及输入获取部3032形成为与服务器300不同的运算处理装置。此时,该不同的运算处理装置构成为能够与服务器300适合地进行协作。另外,设为由不同的装置进行而说明的处理也可以由1个装置执行。在计算机系统中,能够灵活地变更由怎样的硬件结构(服务器结构)实现各功能。
141.本公开通过如下方式也能够实现:将安装有在上述实施方式中说明的功能的计算机程序提供给计算机,该计算机所具有的1个以上的处理器读出程序而执行。这样的计算机程序既可以利用能够与计算机的系统总线连接的非临时性计算机可读存储介质提供给计算机,也可以经由网络提供给计算机。非临时性计算机可读存储介质例如包括磁盘(软盘(floppy(注册商标)disk)、硬盘驱动器(hdd)等)、光盘(cd-rom、dvd盘、蓝光盘等)等任意类型的盘、只读存储器(rom)、随机访问存储器(ram)、eprom、eeprom、磁卡、闪存存储器、光学式卡、适于保存电子的命令的任意类型的介质。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1