一种双模自适应的物联网数据采集系统的制作方法
1.本发明属于车辆数据采集技术领域,具体涉及一种双模自适应的物联网数据采集系统。
背景技术:
2.工程车是一个建筑工程的主干力量,由于它们的出现才使建筑工程的进度倍增,大大减少了人力。观工程车作业,不由得使人震撼机器与科技的威力。它们用于工程的运载,挖掘,抢修,甚至作战等。然而工程车辆出厂后的后台数据仅开放给代理商,设备的购买者或租赁者查询数据流程麻烦费时。而目前设备最大的使用者一般为设备的租赁者,其无法知道所租赁的设备是否全程在自己的项目上工作,工作的时长,有效作业的时间,设备真实油耗与机手上报的是否一致。
3.如cn107845160b提出的一种自动驾驶车辆数据采集系统,其包括:动态数据获取模块,其用于获取待分析自动驾驶车辆的动态数据;数据处理模块,其与所述动态数据获取模块连接,用于对所述动态数据进行预处理,得到预处理动态数据;数据通信模块,其与所述数据处理模块连接,用于将所述预处理动态数据传输至相应的外部设备。本系统能够实现对自动驾驶车辆的混合数据的采集,这样也就为后续客观、准确、量化地对自动驾驶车辆的自动驾驶行为能力的测评奠定了数据基础。但是无法供用户获取具体车辆运转信息,并且获取的数据信息往往不够准确。为此,我们提出一种双模自适应的物联网数据采集系统来解决上述问题。
技术实现要素:
4.本发明的目的在于提供一种双模自适应的物联网数据采集系统,以解决上述背景技术中提出现有的数据采集系统在使用过程中,由于无法供用户获取具体车辆运转信息,并且获取的数据信息往往不够准确。
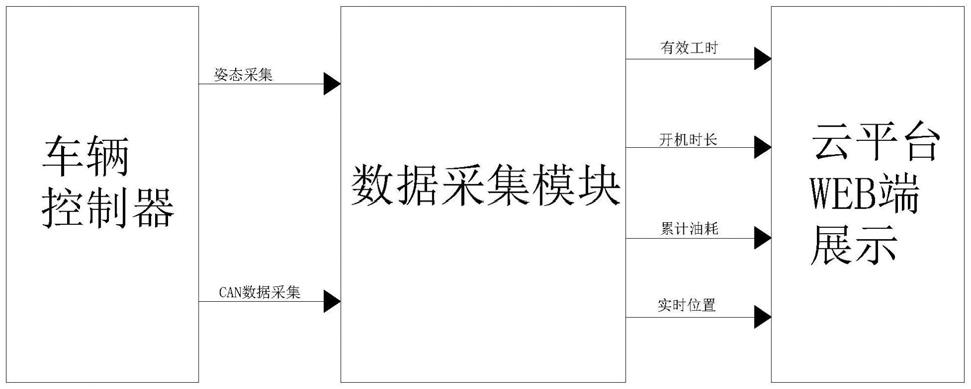
5.为实现上述目的,本发明提供如下技术方案:一种双模自适应的物联网数据采集系统,数据采集模块通过姿态采集、车辆总线数据采集经车辆控制器获取工程车辆的原始数据信息,经所述数据采集模块对数据进行预处理后,将经两种模式采集的数据通过自适应算法对比验证,获取车辆状态数据,并将其上传至云平台。
6.优选的,所述数据采集模块通过车辆自带车载自动诊断系统诊断接口经车辆can总线即控制器局域网络通信采集工程车辆仪表盘上车辆的工作状态。
7.优选的,所述工程车辆上还设置传感器进行姿态采集,获取车辆姿态信息。
8.优选的,所述传感器为六轴传感器,根据采集到的信息通过车辆的运动状态结构软件算法得到车辆运动数据信息数据。
9.优选的,所述数据采集模块中的数据来源频率大,直传数据存在错误波动,对原始数据进行预处理,将一个数据段内的数据进行平方均差等处理,处理掉短时间内的波动数据,使数据趋于平稳接近实际。
10.优选的,所述原始数据包括发动机转速、瞬时油耗、开关机动作、位置信息。
11.优选的,所述数据采集模块将经由姿态采集、can数据采集获取到的数据,通过自适应算法进行对比验证,获取车辆状态数据,并上传云平台。
12.优选的,所述数据采集模块还能经过蓝牙接收智能油箱盖发送的油箱加油偷油信息。
13.优选的,所述车辆状态数据包括车辆的有效工时、开机时长、累计油耗及实时位置。
14.优选的,所述数据采集模块获取的车辆状态数据能通过物联平台,上传云平台,并通过互联网平台将设备数据展示出来。
15.与现有技术相比,本发明的有益效果是:
16.1、通过姿态采集、汽车总线数据采集两种模式对数据信息进行采集,提高数据采集的精准度,精准采集工程车辆作业时长,工作状态,油耗数据,位置信息等数据,能测量工程车辆开机时长,精确至5分钟内;能测量工程车辆有效工作时间,精确至5分钟内;能度量车辆小时耗油量,精确到0.1升/每小时;能实时定位车辆位置,绘制行驶路线轨迹,精确值10米内。
17.2、数据采集模块将相关车辆数据信息上传到云平台,便于用户获取车辆运行信息,实时与物联网云端平台交互所采集到的工程车辆信息。
附图说明
18.图1为本发明的流程图。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.请参阅图1,本发明提供一种技术方案:一种双模自适应的物联网数据采集系统,数据采集模块通过姿态采集、车辆总线数据采集经车辆控制器获取工程车辆的原始数据信息,经数据采集模块对数据进行预处理后,将经两种模式采集的数据通过自适应算法对比验证,获取车辆状态数据,并将其上传至云平台。
21.本实施方案中,通过姿态采集、车辆总线数据采集两种模式对数据信息进行采集,提高数据采集的精准度,并且将相关车辆数据信息上传到云平台,便于用户获取车辆运行信息。
22.具体的,数据采集模块通过车辆自带车载自动诊断系统诊断接口经车辆can总线即控制器局域网络通信采集工程车辆仪表盘上车辆的工作状态。
23.本实施例中,经过车辆自身的obd(车载自动诊断系统)诊断接口通过车辆can(控制器局域网络)通信采集工程车辆本身仪表盘上车辆的工作状态。
24.具体的,工程车辆上还设置传感器进行姿态采集,获取车辆姿态信息。
25.本实施例中,经过传感器对车辆的行驶运转信息进行采集。
26.具体的,传感器为六轴传感器,根据采集到的信息通过车辆的运动状态结构软件算法得到车辆运动数据信息数据。
27.本实施例中,传感器为六轴传感器,用以采集车辆的检测横向加速数据,检测车辆角度旋转和平衡的数据,获取车辆运动信息。
28.具体的,数据采集模块中的数据来源频率大,直传数据存在错误波动,对原始数据进行预处理,将一个数据段内的数据进行平方均差等处理,处理掉短时间内的波动数据,使数据趋于平稳接近实际。
29.本实施例中,为了保证数据的精确度,数据采集的频率大,因此直接传输的数据会有一定的误差波动,对数据进行预处理,能够使数据更加平稳,接近实际工程车辆的运转状况。
30.具体的,原始数据包括发动机转速、瞬时油耗、开关机动作、位置信息。
31.本实施例中,原始采集的数据信息包括发动机转速、瞬时油耗、开关机动作、位置信息等相关汽车运转时的数据信息。
32.具体的,数据采集模块将经由姿态采集、can数据采集获取到的数据,通过自适应算法进行对比验证,获取车辆状态数据,并上传云平台。
33.本实施例中,若汽车不运转,则经姿态采集获取其车辆状态数据,若姿态采集、can数据采集均能采集到数据,通过自适应算法将两个采集模式的数据进行比对,提高数据的精确度,精准获取工程车辆作业时长,工作状态,油耗数据,位置信息等数据,能测量工程车辆开机时长,精确至5分钟内;能测量工程车辆有效工作时间,精确至5分钟内;能度量车辆小时耗油量,精确到0.1升/每小时;能实时定位车辆位置,绘制行驶路线轨迹,精确值10米内。
34.具体的,数据采集模块还能经过蓝牙接收智能油箱盖发送的油箱加油偷油信息。
35.本实施例中,数据采集模块还能获取智能油箱盖发送的油箱加油偷油信息,数据采集模块还能利用gps/北斗双模块实现车辆实时定位,并通过uart异步收发传输器协议实现与mcu单片机进行数据交换以及低功耗控制。
36.具体的,车辆状态数据包括车辆的有效工时、开机时长、累计油耗及实时位置。
37.本实施例中,数据采集模块根据获取的原始数据获得车辆的有效工时、开机时长、累计油耗及实时位置,采集工程车辆的开关机状态,发动机转速,瞬时油耗数据并通过错误数据过滤算法过滤掉错误数据,经过开机工时计算算法,有效工时计算算法,油耗累计算法,计算出车辆的开机时长,有效工作时长,开机时间内的油耗数据。
38.具体的,数据采集模块获取的车辆状态数据能通过物联平台,上传云平台,并通过互联网平台将设备数据展示出来。
39.本实施例中,数据采集模块获得的车辆状态数据在一定时间间隔后对数据进行上传更新,更新的时间间隔可以自行设定,或根据车辆的运动状态设定时间间隔,数据上传到云平台,便于用户访问获取数据,获得工程车辆相应的工作信息,数据更加透明精确。
40.本发明的工作原理及使用流程:数据采集模块通过姿态采集、汽车总线数据采集经车辆控制器获取工程车辆的原始数据信息,经过车辆自身的obd(车载自动诊断系统)诊断接口通过汽车can(控制器局域网络)通信采集工程车辆本身仪表盘上车辆的工作状态,工程车辆上还设置传感器进行姿态采集,获取车辆姿态信息,经数据采集模块整理及处理
后,数据采集模块中的数据来源频率大,直传数据存在错误波动,对原始数据进行预处理,将一个数据段内的数据进行平方均差等处理,处理掉短时间内的波动数据,使数据趋于平稳接近实际,数据采集模块将两个采集模式的数据通过自适应算法进行对比,提高数据的精确度,精准获取工程车辆作业时长,工作状态,油耗数据,位置信息等数据,并将处理后的数据上传至云平台,实时与物联网云端平台交互所采集到的工程车辆信息。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1