停车辅助装置、以及停车辅助系统的制作方法
停车辅助装置、以及停车辅助系统
1.相关申请的交叉引用
2.本国际申请主张基于在2019年8月21日在日本专利局申请的日本专利申请第2019-151250号的优先权,通过参照将日本专利申请第2019-151250号的全部内容引用于本国际申请。
技术领域
3.本发明涉及构成为辅助车辆的停车的停车辅助装置、以及停车辅助系统。
背景技术:
4.在下述专利文献1中,公开如下的技术,作为上述的停车辅助装置,使用从自动驾驶车辆得到的车辆的转弯半径等车辆参数,设定能够通行的引导路径,将自动驾驶车辆引导到规定的停车位置。
5.专利文献1:日本特表2018-502000号公报
技术实现要素:
6.然而,发明者的详细的研究结果为,发现如下的课题,在上述的停车辅助装置中,虽然能够抑制自动驾驶车辆在引导路径上不能行驶的情况,但无法高效地利用停车空间。本发明的一个方式在于,在构成为辅助车辆的停车的停车辅助装置中,能够高效地利用停车空间。
7.本发明的一个方式提供一种停车辅助装置,构成为辅助车辆的停车。停车辅助装置具备分类部、位置设定部、以及驾驶设定部。这里,将构成为从停车场内的下车区域到存在多个停车位置的停车区域内的由该停车辅助装置设定的停车位置为止能够实施自动驾驶的车辆作为自动驾驶车辆。
8.分类部构成为,根据表示与车辆的行驶所需要的区域的宽度相关的值的车辆参数,对自动驾驶车辆进行分类。位置设定部构成为按照自动驾驶车辆的分类,设定用于使自动驾驶车辆集中停车的停车位置。驾驶设定部构成为设定将自动驾驶车辆引导到设定的停车位置的引导路径。
9.根据这样的停车辅助装置,根据车辆参数对自动驾驶车辆进行分类,由此能够将所需要的区域的宽度相似的多个自动驾驶车辆集中停车,因此能够高效地利用停车空间。
附图说明
10.图1是表示停车辅助系统整体的概况的俯视图。
11.图2是表示停车辅助系统的结构的框图。
12.图3是表示管理装置的控制部的结构的框图。
13.图4是表示车辆的控制部的结构的框图。
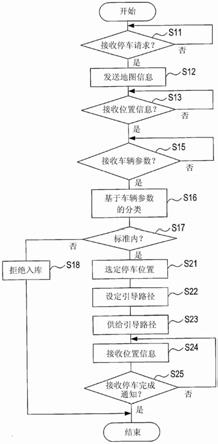
14.图5是停车设定处理的流程图。
15.图6是表示自动驾驶车辆的分类的一例的说明图。
16.图7是自动停车处理的流程图。
17.图8是实施停车设定处理以及自动停车处理时的时序的一例。
18.图9是表示其他的实施方式的停车场的结构的俯视图。
19.图10是自动停车处理的流程图。
20.图11是停车设定处理的流程图。
21.图12是自动停车处理的流程图。
22.图13a是表示较大的车辆停车到停车场的状态的图。
23.图13b是表示较小的车辆停车到与图13a相同的面积的停车场的状态的图。
24.图13c是表示在图13a中,1台较小的车辆与多个较大的车辆一同停车的状态的图。
25.图13d是表示在图13b中,1台较大的车辆与多个较小的车辆一同停车的状态的图。
具体实施方式
26.以下,参照附图,对本发明的实施方式进行说明。
27.[1.实施方式]
[0028]
[1-1.停车辅助系统的结构]
[0029]
基于图1~图3对停车辅助系统1的结构进行说明。如图1所示,停车辅助系统1具备:入库车室3,其设定于用户下车的区域即下车区域;出库车室5,其设定于用户上车的区域即上车区域;以及停车场7。此外,以下,将包含入库车室3、出库车室5以及停车场7的区域也表述为该停车场。
[0030]
在入库车室3和出库车室5分别设置有多个区划。入库车室3经由入口15与停车辅助系统1的外部连接。自动驾驶车辆18能够从外部通过入口15进入到入库车室3。自动驾驶车辆18具备自动代客停车功能。
[0031]
应予说明,自动驾驶车辆18只要能够实施该停车场内的自动代客停车功能即可,不需要具备在该停车场外进行自动驾驶的功能。另外,自动代客停车功能包含:通过自动驾驶而从入库车室3行驶到停车场7中的停车位置,并进行停车的功能;以及从停车场7中的停车位置行驶到出库车室5的功能。
[0032]
自动代客停车功能特别包含:反复获取自动驾驶车辆18的位置信息,并发送给管理装置39的功能;以及从管理装置39接受引导路径,按照引导路径控制自动驾驶车辆18并使其行驶的功能。此外,自动驾驶车辆18的位置信息表示自动驾驶车辆18的当前地的推断结果,例如,包含该停车场的区域内的坐标值。
[0033]
入库车室3和出库车室5与店铺等施设22的入口23邻接。入库到入库车室3的自动驾驶车辆18的乘员能够从自动驾驶车辆18下来,徒步进入到入口23。
[0034]
停车场7是能够供多个自动驾驶车辆18停车的场所。停车场7具备多个停车区域。多个停车区域分别具备多个区划。这里,将入库车室3和出库车室5中的多个区划排列的方向设为行方向。
[0035]
而且,将沿着行方向,最接近入库车室3和出库车室5的2行的区划设为近区域7a。另外,将沿着行方向最远离入库车室3和出库车室5的1行的区划设为里侧区域7c。另外,将停车场7中的除了近区域7a和里侧区域7c之外的区域设为中间区域7b。
[0036]
此外,在图1中该停车场被记载为平面停车场,但该停车场也可以为立体停车场。在该停车场为立体停车场的情况下,将最接近入库车室3和出库车室5的2行的区划设定为近区域7a。而且,将最远离入库车室3和出库车室5的1行的区划设定为里侧区域7c。而且,在停车场7中,将除了近区域7a和里侧区域7c之外的区划设为中间区域7b。这里,最接近的2行的区划意味着车辆的移动距离或者沿着引导路径的引导距离最短。最远离的1行的区划意味着车辆的移动距离或者沿着引导路径的引导距离最长。
[0037]
设置于入库车室3、出库车室5以及停车场7的各个区划是1台自动驾驶车辆18能够停车的区域。自动驾驶车辆18能够从入库车室3行驶到停车场7。自动驾驶车辆18能够从停车场7行驶到出库车室5。
[0038]
在近区域7a中以能够仅使车辆的尺寸较小的车辆停车的方式设定区划。区划例如由白线描绘。在近区域7a能够停车的车辆例如是轻型汽车、道路交通法上的小型汽车等。
[0039]
在中间区域7b和里侧区域7c中,以使得即使是车辆的尺寸较大的车辆也能够停车的方式设定区划。在中间区域7b和里侧区域7c能够停车的较大的车辆例如对应于小型乘用汽车、普通乘用汽车等。
[0040]
在实施方式中,停车场7中的多个区划被设定为,在停车场7的行方向、即车辆的横列方向(例如,车宽方向)上排列相同尺寸的车辆。例如,若像图1那样停车场7的形状为矩形,则如中间区域7b所示,在行方向上,车辆的尺寸较大的车辆能够停车22台。另外,如近区域a所示,车辆的尺寸较小的车辆能够停车42台。
[0041]
参照图13a至图13d,对使自动驾驶车辆18集中停车的情况进行说明。图13a至图13d表示相同面积的停车空间。在图13a中,多个相同尺寸的车辆沿着停车场的行方向和列方向停车。在图13a中,6台较大的车辆l停车。在图13b中,多个相同尺寸的车辆沿着停车场的行方向和列方向停车。在图13b中,12台较小的车辆s停车。
[0042]
在图13c中,较小的车辆s停车在与图13a中较大的车辆l停车的区划对应的区划。在图13d中,较大的车辆l停车在与图13b中4台较小的车辆s停车的区划对应的区划。在图13c和图13d中,产生斜线所示的、未用于停车的区域。通过设定区划以使相同尺寸的车辆在车辆的横列方向或者纵列方向上排列停车,能够抑制未用于停车的区域的产生。即,能够使更多的车辆停车于停车空间,高效地利用停车空间。
[0043]
此外,在图13a至图13d中,使多个相同尺寸的车辆在车辆的横列方向和纵列方向上排列停车,但也可以使相同尺寸的车辆在车辆的横列方向或者纵列方向中的任意一个方向上停车。在该情况下也是,与混合停放不同尺寸的车辆的情况相比,能够抑制未用于停车的区域的产生。
[0044]
如图2所示,停车辅助系统1具备管理装置39、基础设施41、以及终端装置43。管理装置39相当于本发明中的停车辅助装置。
[0045]
管理装置39具备控制部47和通信部49。控制部47具备微型计算机,该微型计算机具有cpu51、以及例如ram或者rom等半导体存储器(以下,称为存储器53)。
[0046]
通过由cpu51执行储存于非迁移实体记录介质的程序而实现控制部47的各功能。在该例中,存储器53对应于储存了程序的非迁移实体记录介质。另外,通过执行该程序,而执行与程序对应的方法。此外,控制部47也可以具备一个微型计算机,也可以具备多个微型计算机。
[0047]
控制部47具备用于对自动驾驶车辆18发送直到停车位置为止的引导路径以及停车开始指示的结构,例如,如图3所示,具备分类部47a、位置设定部47b、驾驶设定部47c、以及停车区域管理部47d。关于构成控制部47的各部47a~47d的动作,后述说明。
[0048]
在存储器53存储有该停车场的地图信息。另外,地图信息包含表示停车场7中的区划的状态的信息。作为区划的状态,存在空闲的状态(以下称为空闲状态)和由自动驾驶车辆18占据的状态(以下称为占有状态)。在图1所示的例子中,区划81~83处于空闲状态,其他区划处于占有状态。区划81位于近区域7a,区划82位于中间区域7b,区划83位于里侧区域7c。通信部49能够与自动驾驶车辆18进行通信。
[0049]
此外,存储器53存储与近区域7a、中间区域7b以及里侧区域7c的停车区划相关的信息。停车区域管理部47d将停车场7的多个停车区域设定为近区域7a、中间区域7b以及里侧区域7c,使存储器53存储与停车区域相关的信息。位置设定部47b参照存储于存储器53的停车区域的信息,设定停车位置。
[0050]
基础设施41包含获取表示停车辅助系统1的内部的状况的信息(以下称为停车场内信息),并将停车场内信息供给到管理装置39的设备。基础设施41包含拍摄停车辅助系统1的内部的照相机、雷达等。
[0051]
作为停车场内信息,例如,列举表示障碍物的位置的信息、表示停车场7中的区划的状态的信息、以及在停车辅助系统1的内部存在的自动驾驶车辆18的位置信息等。
[0052]
如图1所示,终端装置43设置在入库车室3的附近。终端装置43接受乘员的输入操作。终端装置43向管理装置39输出与输入操作对应的信号。
[0053]
终端装置43例如根据输入操作,而输出停车请求信号。停车请求信号是指请求将位于入库车室3的自动驾驶车辆18搬运到停车场7并停车的信号。另外,终端装置43在向管理装置39输出与输入操作对应的信号时,输出自动驾驶车辆18的识别信息等。
[0054]
终端装置43例如根据输入操作,而输出出库请求信号等。出库请求信号是指请求将停车于停车场7的自动驾驶车辆18搬运到出库车室5的信号。另外,终端装置43例如根据输入操作,而输出自动驾驶车辆18的识别信息。识别信息例如是指用于唯一地确定自动驾驶车辆18的号码牌等信息。
[0055]
如上所述,自动驾驶车辆18具备自动代客停车功能。如图2所示,自动驾驶车辆18具备控制部69、传感器组71、位置信息获取部73、以及通信部75。如图4所示,控制部69具备信息发送部69a和驾驶实施部69b。关于构成控制部69的各部69a、69b的动作,后述说明。
[0056]
控制部69控制自动驾驶车辆18的各部。自动驾驶的功能是通过由控制部69进行的控制而实现的。自动驾驶车辆18从管理装置39获取该停车场的地图信息以及引导路径,在进行自动驾驶时,使用该停车场的地图信息以及引导路径。
[0057]
传感器组71获取表示自动驾驶车辆18的周边的状况的周边信息。作为周边信息的内容,例如,列举存在于自动驾驶车辆18的周边的障碍物的位置、白线、后述的标记的位置等。传感器组71例如包含照相机、雷达等。自动驾驶车辆18在进行自动驾驶时,使用周边信息。
[0058]
位置信息获取部73获取自动驾驶车辆18的位置信息。位置信息获取部73例如为基于雷达和地图的位置推断系统。自动驾驶车辆18在进行自动驾驶时,使用位置信息。通信部75能够与管理装置39进行通信。
[0059]
[1-2.处理]
[0060]
[1-2-1.由管理装置39执行的处理]
[0061]
使用图5对由管理装置39执行的停车设定处理进行说明。停车设定处理例如是在将管理装置39的电源接通时开始,之后反复执行的处理。
[0062]
管理装置39的驾驶设定部47c在图5所示的停车设定处理的步骤(以下称为“s”)11中,判定是否接收到停车请求信号。
[0063]
这里,若用户通过操作终端装置43而输入停车请求,则终端装置43向管理装置39发送与该输入对应的停车请求信号。此时,用户对终端装置43输入用于确定车辆的号码牌等车辆信息、用于确定用户的用户id、密码等用户信息、以及其他所需要的信息。
[0064]
若终端装置43被操作,则向管理装置39发送车辆信息、用户信息等。用户在停车请求的操作后,能够离开该停车场而朝向目的地。接着,驾驶设定部47c在s12中,向自动驾驶车辆18发送该停车场的地图信息。
[0065]
接受到地图信息的自动驾驶车辆18被设定为像后述那样返回位置信息。因此,驾驶设定部47c在s13中,判定是否接收到位置信息。如果在s13中未接收到位置信息,则反复进行s13。
[0066]
另外,如果在s13中接收到位置信息,则移至s15,管理装置39的分类部47a判定是否从自动驾驶车辆18接收到车辆参数。这里,车辆参数表示与车辆的行驶所需要的区域的宽度相关的值。车辆参数包含自动驾驶车辆18的尺寸、自动驾驶车辆18的车轮的最大转弯角度的大小、最小转弯圆的大小、检测自动驾驶车辆18的周围的传感器发挥功能的范围的宽度等。
[0067]
此外,也可以是,在入库车室3中预先具备照相机,管理装置39使用从该照相机获取的拍摄图像来计算作为车辆参数的自动驾驶车辆18的尺寸。另外,车辆参数可以包含自动驾驶车辆18的尺寸、最大转弯角度的大小、最小转弯圆的大小、检测自动驾驶车辆18的周围的传感器发挥功能的范围的宽度中的一个或者多个的组合。
[0068]
另外,自动驾驶车辆18的尺寸可以包含自动驾驶车辆18的宽度、长度、高度中的至少任一个。在本实施方式中,作为自动驾驶车辆18的尺寸,采用自动驾驶车辆18的宽度和长度。
[0069]
如果在s15中未接收到车辆参数,则分类部47a反复进行s15。另外,如果在s15中接收到车辆参数,则移至s16,根据车辆参数对自动驾驶车辆18进行分类。
[0070]
这里,如图6所示,分类部47a使用自动驾驶车辆18的尺寸将自动驾驶车辆18分类为关于尺寸的级别“1”“2”“3”这3个阶段。例如在自动驾驶车辆18为轻型汽车、小型汽车的情况下,分类部47a将自动驾驶车辆18分类为级别“1”,在自动驾驶车辆18的全长小于4.5m的情况下,分类部47a将自动驾驶车辆18分类为级别“2”,在自动驾驶车辆18的全长为4.5m以上的情况下,分类部47a将自动驾驶车辆18分类为级别“3”。即,随着停车所需要的空间的宽度变大,分类为较高的级别。
[0071]
另外,分类部47a使用自动驾驶车辆18的车轮的最大转弯角度的大小将自动驾驶车辆18分类为关于最大转弯角度的级别“1”“2”“3”这3个阶段。例如在最大转弯角度为第一阈值以上的情况下,分类部47a将自动驾驶车辆18分类为级别“1”,在最大转弯角度小于第一阈值且为第二阈值以上的情况下,分类部47a将自动驾驶车辆18分类为级别“2”,在最大
转弯角度小于第二阈值的情况下,分类部47a将自动驾驶车辆18分类为级别“3”。即,随着转弯所需要的空间的宽度变大,分类为较高的级别。
[0072]
此外,分类部47a也可以取代自动驾驶车辆18的尺寸、或者与自动驾驶车辆18的尺寸进行组合,根据检测自动驾驶车辆18的周围的传感器发挥功能的范围的宽度,对自动驾驶车辆18进行分类。传感器发挥功能的范围的宽度例如是通过将传感器的检测距离与自动驾驶车辆18的尺寸相加而得的。另外,分类部47a也可以取代最大转弯角度、或者与最大转弯角度进行组合,使用最小转弯圆的大小对自动驾驶车辆18进行分类。
[0073]
接着,分类部47a移至s17,基于从自动驾驶车辆18发送的车辆参数,判定自动驾驶车辆18是否能够停车。这里,基于车辆参数,判定自动驾驶车辆18是否符合预先设定的标准。例如在最大转弯角度为级别“3”情况下、或者在车辆的尺寸中的宽度、长度、高度中的任一方为针对宽度、长度、高度分别预先准备的上限值以上的情况下,分类部47a判定为自动驾驶车辆处于标准外、不能停车。如果不能停车,则移至s18,驾驶设定部47c拒绝自动驾驶车辆18的入库,结束停车设定处理。此时,驾驶设定部47c向自动驾驶车辆18通知拒绝入库的内容的通知即拒绝入库。
[0074]
如果能够停车,则移至s21,管理装置39的位置设定部47b选定停车位置。
[0075]
作为停车位置,选定停车场7中的处于空闲的状态的区划。位置设定部47b例如像以下那样判定各个区划的状态。自动驾驶车辆18在向某个区划停车时,将该区划的识别信息和停车开始的信息发送至管理装置39。另外,自动驾驶车辆18在离开此前已停车的区划时,将该区划的识别信息和停车结束的信息发送至管理装置39。
[0076]
位置设定部47b基于从自动驾驶车辆18发送来的信息的履历,判定各个区划的状态。另外,位置设定部47b也可以基于由基础设施41供给的信息,判定各个区划的状态。
[0077]
在位置设定部47b设定停车位置时,使用按照自动驾驶车辆18的尺寸分类的级别。即,如图6所示,位置设定部47b将分类为级别“1”的自动驾驶车辆18的停车位置设定于近区域7a内的空闲空间。另外,将分类为级别“2”的自动驾驶车辆18的停车位置设定于中间区域7b内的空闲空间。另外,将分类为级别“3”的自动驾驶车辆18的停车位置设定于里侧区域7c内的空闲空间。
[0078]
这样,位置设定部47b按照自动驾驶车辆18的分类,设定用于使自动驾驶车辆18集中停车的停车位置。位置设定部47b将分类为分类中的相对较小的尺寸的自动驾驶车辆18的停车位置设定在与分类为分类中的相对较大的尺寸的自动驾驶车辆18的停车位置即中间区域7b和里侧区域7c相比,更接近乘员相对于自动驾驶车辆18上下车的上下车位置的位置即近区域7a。换言之,位置设定部47b将分类为小于规定的阈值的自动驾驶车辆18的停车位置设定在与分类为大于该阈值的自动驾驶车辆18的停车位置相比,更接近乘员的上下车位置的位置。
[0079]
此外,位置设定部47b也可以以使得在停车场7中,分类为相同尺寸的自动驾驶车辆18在自动驾驶车辆18停车时沿车宽方向排列的方式设定自动驾驶车辆18的停车位置。
[0080]
另外,在要设定的区域7a、7b、7c不存在空闲空间的情况下,也可以在其他区域的空闲空间设定停车位置。例如也可以是,例如在s21中,在符合自动驾驶车辆18的分类的停车区域内不存在空闲状态的停车位置的情况下,停车区域管理部47d将与符合自动驾驶车辆18的分类的停车区域邻接的停车区域变更为符合自动驾驶车辆18的分类的停车区域。
[0081]
具体而言,在要设定的近区域7a为满车的情况下,也可以将中间区域7b中的最接近近区域7a的1行的区划作为近区域7a利用。此外,停车区域管理部47d也可以在停车设定处理的开始之后、停车设定处理的开始前等任意的时刻,按照自动驾驶车辆18的分类设定该停车场的停车区域。
[0082]
接着,在s22中,驾驶设定部47c使用该停车场的地图信息来设定从自动驾驶车辆18的当前地到在上述s21中选定的停车位置为止的引导路径。
[0083]
这里,如图1所示,停车场7中的通路分别与能够根据通路的宽度而通行的自动驾驶车辆18的分类建立对应。此外,通路是停车场7中的未设定为区划的区域。图1所示的通路8a为最窄的通路,仅最大转弯角度中的级别“1”的车辆能够通行。通路8b为比通路8a稍宽的通路,最大转弯角度中的级别“1”和“2”的车辆能够通行。通路8c为最宽的通路,全部的车辆能够通行。
[0084]
驾驶设定部47c根据最大转弯角度中的分类,利用自动驾驶车辆18能够通行的通路来设定引导路径。
[0085]
在s23中,驾驶设定部47c使用通信部49发送表示在上述s22中设定的引导路径的信息(以下称为引导路径信息)。此外,引导路径信息兼作针对自动驾驶车辆18的停车开始的指示。此外,像后述那样,自动驾驶车辆18接收引导路径信息,开始按照引导路径的自动驾驶。
[0086]
接着,驾驶设定部47c在s24中,判定通信部49是否接收到停车完成通知。停车完成通知是在自动驾驶车辆18停车到作为引导路径的终点的停车位置时,由自动驾驶车辆18发送的通知。在接收到停车完成通知的情况下,驾驶设定部47c结束本处理。在未接收到停车完成通知的情况下,返回s24。
[0087]
[1-2-2.由自动驾驶车辆18执行的自动停车处理]
[0088]
使用图7对由自动驾驶车辆18执行的自动停车处理进行说明。自动停车处理是根据由管理装置39执行的停车设定处理,自动驾驶车辆18从入库车室3自动驾驶到停车位置的处理。
[0089]
控制部69的驾驶实施部69b在s51中,判定通信部75是否接收到该停车场的地图信息。另外,在未接收地图信息的情况下,返回s51。
[0090]
在接收到地图信息的情况下,移至s41,驾驶实施部69b推断自动驾驶车辆18的当前地。而且,在s42中,将当前地的推断结果作为自动驾驶车辆18的位置信息,发送给管理装置39。
[0091]
接着,控制部69的信息发送部69a在s43中发送车辆参数。车辆参数与由管理装置39接收的信息相同。
[0092]
接着,驾驶实施部69b在s44中,判定是否接收到引导路径信息。引导路径信息是由管理装置39发送的信息。如果在s44中未接收到引导路径信息,则驾驶实施部69b反复进行s44。如果在s44中接收到引导路径信息,则驾驶实施部69b在s52中开始自动驾驶车辆18的自动驾驶。在进行自动驾驶时,驾驶实施部69b按照包含于引导路径信息的路径,使自动驾驶车辆18行驶。
[0093]
接着,驾驶实施部69b在s53中,继续自动驾驶车辆18的自动驾驶。驾驶实施部69b反复发送自动驾驶车辆18的位置信息,直到在后述的s54中判定为停车完成为止。所发送的
位置信息由管理装置39接收。
[0094]
接着,驾驶实施部69b在s54中,判定停车是否完成。停车完成是指自动驾驶车辆18停车到由管理装置39设定的停车位置。在停车未完成的情况下,返回s54。
[0095]
在停车完成的情况下,移至s55,驾驶实施部69b使用通信部75发送停车完成通知。此外,管理装置39接收所发送的停车完成通知。
[0096]
图10是由自动驾驶车辆18执行的自动停车处理的其他的方式。s51至s55与图7相同。在图10的自动停车处理中,如果在s44中未接收到引导路径信息,则驾驶实施部69b在s56中判定是否从管理装置39通知了拒绝入库的内容的通知即拒绝入库。如果在s56中未接收到拒绝入库,则驾驶实施部69b返回s44。如果在s56中通知了拒绝入库,则结束自动停车处理。此时,也可以经由终端装置43向用户通知拒绝入库的内容。通过像这样构成,用户能够掌握无法进行自动驾驶车辆18的自动停车。
[0097]
[1-2-3.时序的例示]
[0098]
在图8中表示由终端装置43、管理装置39以及自动驾驶车辆18执行的时序的一例。在该时序中,表示如下等:若用户利用终端装置43进行停车开始的内容的输入,则管理装置39向自动驾驶车辆18发送地图信息,若自动驾驶车辆18从管理装置39接收到地图信息,则自动驾驶车辆18向管理装置39发送自动驾驶车辆18的车辆参数,管理装置39根据车辆参数来设定停车位置和引导路径。
[0099]
[1-3.效果]
[0100]
根据以上详述的实施方式,实现以下的效果。
[0101]
(1a)本发明的一个方式是构成为辅助车辆的停车的管理装置39。管理装置39具备分类部47a、位置设定部47b、以及驾驶设定部47c。将构成为从停车场内的下车区域到存在多个停车位置的停车区域内的由该管理装置39设定的停车位置为止能够实施自动驾驶的车辆作为自动驾驶车辆18。
[0102]
分类部47a构成为,根据表示与车辆的行驶所需要的区域的宽度相关的值的车辆参数,对自动驾驶车辆18进行分类。位置设定部47b构成为,按照自动驾驶车辆18的分类,设定用于使自动驾驶车辆18集中停车的停车位置。驾驶设定部47c构成为,设定将自动驾驶车辆18引导到所设定的停车位置的引导路径。
[0103]
根据这样的停车辅助系统1,通过根据车辆参数进行分类,能够将所需要的区域的宽度相似的多个自动驾驶车辆18集中停车,因此能够高效地利用停车空间。例如,能够增加可收纳于停车场的车辆的台数。
[0104]
(1b)在本发明的一个方式中,作为车辆参数,分类部47a使用自动驾驶车辆18的尺寸对自动驾驶车辆18进行分类。
[0105]
根据这样的停车辅助系统1,能够在自动驾驶车辆18的停车中将多个车辆的端部的位置对齐,因此能够提高停车空间的利用效率。
[0106]
(1c-1)在本发明的一个方式中,位置设定部47b将分类为分类中的相对较小的尺寸的自动驾驶车辆18的停车位置设定在与分类为分类中的相对较大的尺寸的自动驾驶车辆18的停车位置相比,更接近乘员相对于自动驾驶车辆18上下车的上下车位置的位置。
[0107]
(1c-2)在本发明的一个方式中,作为车辆参数,分类部47a使用自动驾驶车辆18的尺寸对自动驾驶车辆18进行分类。位置设定部47b将分类为尺寸小于规定的阈值的自动驾
驶车辆18的停车位置设定在与分类为尺寸大于阈值的自动驾驶车辆18的停车位置相比,更接近乘员相对于自动驾驶车辆18上下车的上下车位置的位置。
[0108]
(1c-3)根据上述(1c-1)和(1c-2)这样的停车辅助系统1,由于将每1台专用面积较小的自动驾驶车辆18的停车位置设定在停车区域中的接近上下车位置的位置,因此能够使更多的自动驾驶车辆18停车在接近上下车位置的位置。因此,能够减少多个自动驾驶车辆18的移动距离的总和。
[0109]
(1d)在本发明的一个方式中,作为车辆参数,分类部47a使用自动驾驶车辆18的车轮的最大转弯角度的大小、或者最小转弯圆的大小对自动驾驶车辆18进行分类。
[0110]
根据这样的停车辅助系统1,使用自动驾驶车辆18的车轮的最大转弯角度的大小、或者最小转弯圆的大小对自动驾驶车辆18进行分类,因此能够使成为直到停车位置为止的路径的通路的宽度成为最小限度。
[0111]
(1e)在本发明的一个方式中,作为车辆参数,分类部47a使用检测自动驾驶车辆18的周围的传感器发挥功能的范围的宽度对自动驾驶车辆18进行分类。
[0112]
根据这样的停车辅助系统1,由于使用检测车辆周围的传感器发挥功能的范围的宽度进行分类,因此能够使通路宽度的余量、即自动驾驶车辆18与壁面、停车车辆等周围的物体的间隔成为最小限度。
[0113]
(1f)在本发明的一个方式中,分类部47a构成为,基于车辆参数,判定自动驾驶车辆18是否符合预先设定的标准。另外,驾驶设定部47c构成为,在自动驾驶车辆18不符合标准的情况下,向自动驾驶车辆18通知拒绝入库。
[0114]
根据这样的结构,在自动驾驶车辆18不符合标准的情况下,能够向自动驾驶车辆18通知拒绝入库。
[0115]
(1g)在本发明的一个方式中,管理装置39构成为,还具备停车区域管理部47d,该停车区域管理部47d构成为按照自动驾驶车辆18的分类来设定停车场的停车区域,位置设定部47b构成为,针对自动驾驶车辆18,设定符合该自动驾驶车辆18的分类的停车区域内的停车位置。
[0116]
根据这样的停车辅助系统1,停车区域管理部47d按照自动驾驶车辆18的分类来设定停车场的停车区域,因此位置设定部47b能够在所设定的停车区域内设定停车位置。
[0117]
(1h)在本发明的一个方式中,停车区域管理部47d构成为,在针对自动驾驶车辆18,符合自动驾驶车辆18的分类的停车区域内不存在空闲状态的停车位置的情况下,将与符合自动驾驶车辆18的分类的停车区域邻接的停车区域变更为符合该自动驾驶车辆18的分类的停车区域。
[0118]
根据这样的结构,在符合自动驾驶车辆18的分类的停车区域内不存在空闲状态的停车位置的情况下,只要在邻接的停车区域存在空闲,则能够使自动驾驶车辆18停车到该邻接的停车区域。具体而言,在近区域7a为满车的情况下,能够将中间区域7b中的最接近近区域7a的1行的区划作为近区域7a利用。
[0119]
(1i)在本发明的一个方式中,作为车辆参数,分类部47a使用自动驾驶车辆18的尺寸对自动驾驶车辆18进行分类。另外,位置设定部47b构成为,以使得分类为相同尺寸的自动驾驶车辆18在自动驾驶车辆18的车宽方向上排列地停车的方式设定停车位置。
[0120]
根据这样的结构,能够使分类为相同尺寸的多个自动驾驶车辆18在宽度方向上排
列配置,因此能够减少停车空间内的死区。
[0121]
[2.其他实施方式]
[0122]
以上,对本发明的实施方式进行了说明,但本发明不限于上述的实施方式,能够各种变形地实施。
[0123]
(2a)上述实施方式中,利用白线规定了停车场7中的区划,但不限于此。例如,也可以在停车场的路面上具备自动驾驶车辆18能够识别的、规定停车位置的端部的预先准备的多个标记,利用多个标记规定区划。
[0124]
具体而言,例如如图9所示,在停车场的路面上,按照比自动驾驶车辆18的宽度和长度短的单位长度准备标记,位置设定部47b根据车辆的大小来设定用于停车的标记。在图9所示的例子中,在车辆的长度方向上每隔1.0m、在车辆的宽度方向上每隔0.5m,配置具有与邻接的标记不同的图案的多个标记。
[0125]
而且,位置设定部47b根据车辆的分类,指定规定四个角的标记以收纳自动驾驶车辆18。例如,在自动驾驶车辆18为普通乘用汽车的情况下,以宽度2.0m、长度5.0m的方式指定4个标记。另外,在自动驾驶车辆18为轻型汽车的情况下,以宽度1.5m、长度4.0m的方式指定4个标记。
[0126]
自动驾驶车辆18通过搭载于本车辆的照相机等传感器来探索所指定的标记,识别停车位置。
[0127]
根据这样的结构,按照自动驾驶车辆18的分类,利用特定的标记指定停车位置,因此自动驾驶车辆18能够正确地识别停车位置而进行停车。
[0128]
(2b)在上述(2a)的情况下,位置设定部47b以将相同的分类的自动驾驶车辆18邻接配置的方式设定停车位置。例如也可以是,在近区域7a为满车的情况下,位置设定部47b将中间区域7b中的最接近近区域7a的1行的区划作为近区域7a利用。
[0129]
根据该结构,能够动态地设定各种大小的区划,因此能够减少停车空间内的无用空间。
[0130]
(2c)在上述(2a)(2b)的情况下,作为标记不需要使用不同的图案。标记能够采用任意的涂料、反射板等能够由车辆识别的任意的标记。
[0131]
(2d-1)在上述实施方式中,构成为在自动驾驶车辆18发送了位置信息之后,从自动驾驶车辆18发送车辆参数,判定是否能够入库,但不限于该结构。也可以取而代之,在自动驾驶车辆18进入入库车室3之前,向管理装置39发送与车辆的种类相关的信息,判定是否能够入库。
[0132]
例如,作为与车辆的种类相关的信息,也可以发送与车种相关的信息(也称为车种信息)。车种例如是指轻型汽车、普通汽车、中型汽车、大型汽车等车辆的种类。以下,使用图11和图12对停车设定处理的变形例进行说明。
[0133]
在上述实施方式中,虽然省略了说明,但若自动驾驶车辆18接近或者进入该停车场,则自动驾驶车辆18与管理装置39建立连接,成为能够通信的状态。自动驾驶车辆18与管理装置39建立连接的时刻能够进行各种设定。即,建立连接的时刻也可以是自动驾驶车辆18从停车场的外部接近入口15的时刻,也可以是通过入口15的时刻,也可以是从入口15向入库车室3的行驶中,也可以从某个时刻开始直到建立连接为止反复尝试。
[0134]
图11是停车设定处理的流程图。停车设定处理为由管理装置39执行的处理。管理
装置39反复尝试s30,直到在s30中建立连接为止。在s30中,管理装置39与自动驾驶车辆18建立连接,成为能够通信的状态。
[0135]
在s31中,管理装置39的分类部47a判定是否从自动驾驶车辆18接收到车种信息。如果在s31中未接收到车种信息,则分类部47a反复进行s31。
[0136]
分类部47a若接收到车种信息,则移至s32。分类部47a基于发送来的车种信息,判定是否能够进行自动驾驶车辆18的停车。即,基于车种信息,判定自动驾驶车辆18是否符合预先设定的标准。例如在自动驾驶车辆18的车种为大型汽车,停车场仅对应于轻型汽车和普通汽车的情况下,分类部47a判定为不符合标准,判定为不能停车。
[0137]
在判定为自动驾驶车辆18不符合标准的情况下,移至s18。在s18中,驾驶设定部47c拒绝自动驾驶车辆18的入库,结束停车设定处理。驾驶设定部47c向自动驾驶车辆18通知拒绝入库的内容的通知即拒绝入库。
[0138]
在自动驾驶车辆18的车种符合标准的情况下,向自动驾驶车辆18通知该内容,移至s11。s11至s25与上述实施方式同样。
[0139]
接下来,参照图12对自动停车处理进行说明。图12的自动停车处理是根据由管理装置39执行的停车设定处理,自动驾驶车辆18从与管理装置39建立连接的时刻自动驾驶到停车位置的处理。
[0140]
自动驾驶车辆18反复尝试s60,直到在s60中建立连接为止。在s60中,自动驾驶车辆18与管理装置39建立连接,成为能够通信的状态。在s61中,控制部69的信息发送部69a发送车种信息。
[0141]
在s62中,判定是否从管理装置39通知拒绝入库的内容的通知即拒绝入库。在未通知拒绝入库的情况下,进入s51。此外,在未通知拒绝入库的情况下,作为针对发送来的车种信息的响应,接收自动驾驶车辆18的车种符合标准这样的内容。
[0142]
如果在s62中通知拒绝入库,则结束自动停车处理。也可以经由自动驾驶车辆18向用户通知拒绝入库的内容。s51以后的处理与上述实施方式同样,因此省略说明。
[0143]
(2d-2)根据上述(2d-1)的结构,得到与上述实施方式相同的效果。并且,能够抑制无法自动代客停车的车辆进入入库车室,提高停车场的利用效率。另外,对于无法自动代客停车的车辆的用户来说,能够在进入入库车室之前掌握无法自动代客停车的情况,提高便利性。对于其他用户来说,由于能够利用的入库车室增加,因此提高便利性。
[0144]
(2e)在上述实施方式中,在近区域7a中,以使得仅车辆的尺寸较小的车辆能够停车的方式设定区划。在中间区域7b和里侧区域7c中,以使得即使是车辆的尺寸较大的车辆也能够停车的方式设定区划。然而,不限于这样的结构。
[0145]
例如,作为停车场7的多个停车区域,也可以不存在中间区域7b,而配置近区域7a和里侧区域7c。在该情况下,例如像以下那样设定两区域7a、7c的范围。
[0146]
将该停车场中接近入库车室3和出库车室5的区域设为近区域7a,将远离入库车室3和出库车室5的区域设为里侧区域7c。而且,近区域7a为较大的车辆主要停车的区域,里侧区域7c为仅较小的车辆停车的区域。接近入库车室3和出库车室5的区域的范围也可以以停车场7的中间地点(例如,重心位置)为基准。或者,也可以调查利用停车场的车辆的种类,根据调查结果来决定接近的区域的范围。
[0147]
即使这样设定停车区域,通过根据车辆参数进行分类,能够将所需要的区域的宽
度相似的多个自动驾驶车辆18集中停车,因此能够高效地利用停车空间。并且,对于直到停车位置为止的通路,较大的车辆仅在接近入库车室3和出库车室5的近区域7a行驶。因此,从入库车室3和出库车室5到近区域7a为止的通路与近区域7a内的通路需要较宽,但包含于里侧区域7c的通路能够设定得窄。即,能够增加在停车场7中的区划中能够设定的区域。
[0148]
(2f)将入库车室3和出库车室5中的多个区划排列的方向设为行方向,将与行方向垂直的方向称为列方向。而且,也可以将沿着列方向,从入库车室3和出库车室5观察时最右的2列的区划设为第一区域7d。而且,也可以将沿着列方向,从入库车室3和出库车室5观察时位于最左的1列的区划设为第三区域7f。也可以将停车场7中的除了第一区域7d和第三区域7f之外的区域设为第二区域7e。
[0149]
而且,入库车室3和出库车室5中的多个区划排列的方向即行方向与自动驾驶车辆18停车时的车宽方向也可以像上述实施方式那样为大致一致的方向,行方向与车宽方向也可以为不同的方向。
[0150]
根据这些结构,在自动驾驶车辆18的停车中能够将多个车辆的端部的位置对齐,因此能够提高停车空间的利用效率。
[0151]
(2g)本发明的一个方式中,分类部47a也可以构成为,在自动驾驶车辆18到达下车区域之前,接收与自动驾驶车辆18的种类相关的信息,并且基于接收到的与种类相关的信息,判定自动驾驶车辆18是否符合预先设定的标准。驾驶设定部47c也可以构成为,在自动驾驶车辆18不符合标准的情况下,向自动驾驶车辆18通知拒绝入库。
[0152]
根据这样的结构,在自动驾驶车辆18到达下车区域之前,判定自动驾驶车辆18是否符合标准,在不符合标准的情况下,能够通知拒绝入库。例如,在作为标准应用车种的情况下,在根据车种进行拒绝入库时,能够更早期地通知拒绝入库。
[0153]
(2h)也可以通过多个构成要素实现上述实施方式中的一个构成要素所具有的多个功能,或者通过多个构成要素实现一个构成要素所具有的一个功能。另外,也可以通过一个构成要素实现多个构成要素所具有的多个功能,通过一个构成要素实现由多个构成要素实现的一个功能。另外,也可以省略上述实施方式的结构的一部分。另外,也可以相对于其他的上述实施方式的结构附加或者置换上述实施方式的结构的至少一部分。
[0154]
(2i)除了上述的管理装置39之外,也可以以将该管理装置39作为构成要素的停车辅助系统1、用于使计算机作为该管理装置39或者自动驾驶车辆18发挥功能的程序、记录了该程序的半导体存储器等非迁移实态记录介质、停车辅助方法等各种方式实现本发明。在停车辅助系统1中,也可以在构成要素中包含停车场。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1