一种基于AI车载导航的精密分流测速系统的制作方法
一种基于ai车载导航的精密分流测速系统
技术领域
1.本发明涉及车辆导航领域,尤其涉及一种基于ai车载导航的精密分流测速系统。
背景技术:
2.车载导航是利用车载北斗/gps(全球定位系统)配合电子地图来进行的,它能方便且准确地告诉驾驶者去往目的地的最短或者最快路径,是驾驶员的好帮手。人工智能(artificial intelligence),英文缩写为ai,是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。车载人工智能是现有汽车行业发展的一个重要方向,即将现有逐渐成熟的ai技术运用到汽车上,提升汽车的人机交互能力,使汽车具备更好的辅助驾驶能力。在这种应用的基础上,利用ai技术替换原有的地图导航,实现智能互动,也是车载人工智能的重要运用手段之一。这种技术在车载导航中的运用,能实现多种原有功能的升级式替代,在行车测速上就是其理论上能实现的功能之一。
3.传统的车辆测速是根据车辆经过平行线圈的速度来判断是否超速,并摄像取证。现有技术中也有运用雷达、激光、声波等方式实现测速,这些测速尚未取代传统的采像测速方式,因为这样的测速方式受天气、周围环境、监测设备、车流量的影响,其局限性较大,往往不能检测出所有情况。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于ai车载导航的精密分流测速系统。
5.为了实现上述目的,本发明采用了如下技术方案:
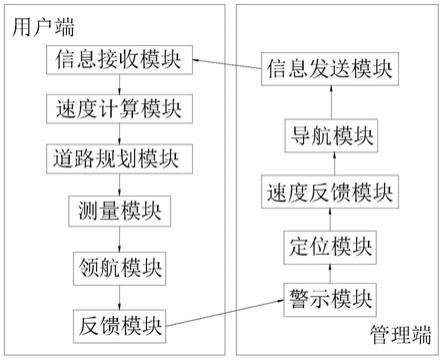
6.一种基于ai车载导航的精密分流测速系统,包括设置在车辆上并与车载ai绑定的用户端、设置在交通管理基站的管理端;管理端包括按照数据的输出方向顺次连接的信息接收模块、速度计算模块、道路规划模块、测量模块、领航模块,还包括与管理端无线连接的反馈模块,用户端包括按照数据输出方向顺次连接定位模块、速度反馈模块、导航模块、信息发送模块,还包括与用户端车载ai无线连接的警示模块;信息发送模块与信息接收模块无线连接,反馈模块和警示模块无线连接。
7.优选的,本发明所述分流测速系统的工作方法包括以下步骤:s1用户端ai导航测速并上传数据;定位模块利用北斗/gps技术定位车辆当前位置,并对车辆当前速度进行测量,速度反馈模块将速度数据反馈到导航模块,导航模块将车辆的速度数据和位置数据通过信息发送模块传输到信息接收模块;s2速度测量核算;速度计算模块根据车辆的速度数据和位置数据,计算能测量车辆速度最近的测量点,调用测量模块中最近的测量点,对车辆的速度进行测算,确认车辆速度数据是否正确;s3道路规划;根据s2中确认的速度数据,调取当前城市道路车辆分布图,计算出每条道路车流量负载情况,并根据车辆的速度数据计算其即将到汇入的车流;s4道路领航;根据s3中预测出的车流分布,将当前车辆中存在超载车流的道路选择删去,形成领航道路数据,领航模块将数据传输到导航模块;s5道路导航;
根据传输来的领航道路数据,导航模块将继续规划道路,并提醒车辆用户导航信息更改。
8.优选的,在s2速度测量核算的步骤中,如果车辆速度核算没验证正确,将重新提交的命令通过反馈模块将信息传输到警示模块,警示模块将命令传输到定位模块,进行重新定位测算速度。
9.优选的,在s3道路规划中,道路车流量分为超载、正常、轻载、畅通四个级别;其中超载级别对应的车辆平均速度将为6~12km/h,正常级别对应的车辆平均速度将为12~18km/h,轻载级别对应的车辆平均速度将为18~25km/h,畅通级别对应的车辆平均速度将为25~40km/h。
10.优选的,在s4道路领航的步骤中,存在两条及以上道路分配的情况下,领航路线强制删除超载路线,领航路线的优先级为畅通、轻载、正常。
11.优选的,测量模块测出超速情况,首先完成车辆摄像,再将超速信息传输到反馈模块,由反馈模块将信息发送到警示模块,提示超速。
12.优选的,领航模块的道路规划领先于车辆汇流,领先时间为15~30min。
13.本发明的有益效果为:本发明中设置了导航模块、领航模块和反馈模块,利用车载ai配合管理端的城市道路监督完成对导航道路的不断修正,一是能在导航过程中实现城市车辆的分流管理,便于控制车流量大小,既能便于测速管理又能提升城市交通的安全性;二是能通过测速核算和反馈,调动对应的测量点,实现对车辆的精准测速,利用测速数据实现道路规划,提升测速和道路规划的精确程度。
附图说明
14.图1为本发明所述分流测速系统的结构图。
具体实施方式
15.下面将结合具体实施例对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
16.参照图1,一种基于ai车载导航的精密分流测速系统,包括设置在车辆上并与车载ai绑定的用户端、设置在交通管理基站的管理端;管理端包括按照数据的输出方向顺次连接的信息接收模块、速度计算模块、道路规划模块、测量模块、领航模块,还包括与管理端无线连接的反馈模块,用户端包括按照数据输出方向顺次连接定位模块、速度反馈模块、导航模块、信息发送模块,还包括与用户端车载ai无线连接的警示模块;信息发送模块与信息接收模块无线连接,反馈模块和警示模块无线连接。
17.在本实施例中,本发明分流测速系统的工作方法包括以下步骤:s1用户端ai导航测速并上传数据;定位模块利用北斗/gps技术定位车辆当前位置,并对车辆当前速度进行测量,速度反馈模块将速度数据反馈到导航模块,导航模块将车辆的速度数据和位置数据通过信息发送模块传输到信息接收模块;s2速度测量核算;速度计算模块根据车辆的速度数据和位置数据,计算能测量车辆速度最近的测量点,调用测量模块中最近的测量点,对车辆的速度进行测算,确认车辆速度数据是否正确;s3道路规划;根据s2中确认的速度数据,调取当前城市道路车辆分布图,计算出每条道路车流量负载情况,并根据车辆的速度数据计算其即将到汇入的车流;s4道路领航;根据s3中预测出的车流分布,将当前车辆中存在超
载车流的道路选择删去,形成领航道路数据,领航模块将数据传输到导航模块;s5道路导航;根据传输来的领航道路数据,导航模块将继续规划道路,并提醒车辆用户导航信息更改。
18.在本实施例中,在s2速度测量核算的步骤中,如果车辆速度核算没验证正确,将重新提交的命令通过反馈模块将信息传输到警示模块,警示模块将命令传输到定位模块,进行重新定位测算速度。
19.在本实施例中,在s3道路规划中,道路车流量分为超载、正常、轻载、畅通四个级别;其中超载级别对应的车辆平均速度将为6~12km/h,正常级别对应的车辆平均速度将为12~18km/h,轻载级别对应的车辆平均速度将为18~25km/h,畅通级别对应的车辆平均速度将为25~40km/h。
20.在本实施例中,在s4道路领航的步骤中,存在两条及以上道路分配的情况下,领航路线强制删除超载路线,领航路线的优先级为畅通、轻载、正常。
21.在本实施例中,测量模块测出超速情况,首先完成车辆摄像,再将超速信息传输到反馈模块,由反馈模块将信息发送到警示模块,提示超速。
22.在本实施例中,领航模块的道路规划领先于车辆汇流,领先时间为15~30min。
23.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
24.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
25.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1