一种基于人工智能的红外激光交通信息采集装置的制作方法
1.本发明涉及交通信息采集系统技术领域,更具体地说,本发明涉及一种基于人工智能的红外激光交通信息采集装置。
背景技术:
2.交通信息采集对于交通管理起着重要的作用,交通信息采集的方法之一就是通过监控视频采集影像资料,比如对于闯红灯电子警察的视频检测抓拍能够有效对车牌进行识别。
3.专利号cn108462438a公开了一种智能交通信息采集系统,包括支架板和固定设置在所述支架板底面左右对称的支承杆,所述支架板中间位置嵌设有信息采集监控,所述支架板上方设置有座体,所述支架板与所述座体之间设置有设置有角度调节装置,所述角度调节装置包括固定设置在所述支架板和所述座体之间的支柱,所述支架板顶面左侧设置有与所述支柱相对称的气压缸,所述气压缸上部配合连接有气压杆,所述气压杆与所述座体底面铰接配合连接,所述座体设置有存电部;本发明结构简单,生产成本低,节能环保。
4.专利号cn106297291b公开了一种城市快速路交通信息采集系统,包括数据采集单元,数据管理单元,信息处理单元,集成接口单元,用户应用单元以及决策管理单元,数据采集单元用于分布广泛、多源异构的海量交通数据的采集、汇聚和整理,数据管理单元用于数据的分布式存储、查询、备份、清理所述,信息处理单元用于对异构数据的清洗、分析、过滤后形成符合标准的信息项;集成接口用于对标准信息提供给请求方,用户应用单元通过web页面上的相关界面进行发布或获取标准信息,决策成对过往数据整理分析并提供决策;通过云计算,大数据处理实现全国智能交通系统的数据交换,各系统之间互通、互联、互操作。
5.上述技术存在以下不足:现有交通信息采集系统容易损毁、造价高、检测精度不够以及覆盖面不全。
技术实现要素:
6.为了克服现有技术的上述缺陷,本发明的实施例提供一种基于人工智能的红外激光交通信息采集装置,以解决上述背景技术中提出的问题。
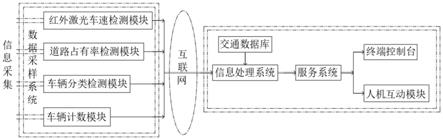
7.为实现上述目的,本发明提供如下技术方案:包括数据采样系统、信息处理系统、服务系统、终端控制台以及人机互动模块。
8.数据采样系统:包括红外激光车速检测模块、道路占有率检测模块、车辆分类检测模块以及车辆计数模块,用于对道路实时交通状况数据采集;
9.优选的,所述红外激光车速检测模块包括磁力传感器、压电传感器视频图像传感器、频率调制连续波雷达传感器或声学传感器,其中磁力传感器与压电传感器为埋入道路地下使用,间接检测车速,视频图像传感器、频率调制连续波雷达传感器以及声学传感器为道路地上安装使用,连续测定车速;
10.优选的,所述道路占有率检测模块包括调频连续波雷达传感器、视频图像传感器
以及环形感应线圈传感器,调频连续波雷达传感器的顶置正向安装时误差<
±
2%,路旁安装时误差<
±
5%,准确率>98%;
11.优选的,所述车辆分类检测模块包括环形感应线圈传感器、视频图像传感器、压电传感器、微波雷达传感器以及红外线传感器,进行车辆分类的检测,环形感应线圈传感器通过测量车长智能分类,视频图像传感器通过捕捉相关图像获得车辆的外形特征等信息进行分类,压电传感器通过获取车辆的轴数和轴距对车辆进行分类,微波雷达传感器通过发射合适的雷达波进行分类,红外线传感器通过发射合适的红外线来感知车辆长度,并进行适当的信息处理实现车辆分类;
12.优选的,所述车辆计数模块包括环形感应线圈传感器、磁力传感器、视频图像传感器、感应线圈传感器、视频图像传感器、微波雷达、红外线传感器、超声波传感器、声学传感器以及埋入式传感器,进行车辆计数值的采集,环形感应线圈传感器、磁力传感器、视频图像传感器等在车流量比较小的环境条件下进行检测,感应线圈传感器、视频图像传感器和微波雷达在车流量比较大的环境条件进行检测,红外线传感器、超声波传感器、声学传感器在对车流量数值精度要求不高的情况下使用,其中,埋入式传感器对车流量数值的检测准确度达99%w;
13.优选的,采用微波雷达从目标反射回来的回波频率和发射频率的变化规律相同,发射频率和回波频率之差可以表征探测目标与雷达之间的距离,对于一定距离r的目标回波,除去在t轴上很小一部分2r/c以外(差频急剧下降为0),其它时间差频是不变的,由此可以得出目标距离r为
14.信息处理系统:通过互联网传输收到数据采样系统收集的数据后,对数据进行分析、处理,并在保存数据后将数据发送至服务系统;
15.优选的,所述信息处理系统包括处理芯片、adc模块以及网络传输模块,处理芯片选用型号为tms320vc5502芯片,主频为300m,处理芯片把ad芯片采集过后的数据进行算法处理,统计出实时交通信息并进行网络传输,adc模块选用型号为ths1206,中频信号输入到ad芯片进行采样,adc模块实现中频信号数字化,网络传输模块由cs8900a芯片和隔离变压器组成,负责把数据通过网络传输到客户pc终端;
16.优选的,处理芯片算法加速包括:
17.s1:将多层或者双层循环改为单层循环,让循环只形成一个pipeline,充分利用dsp的流水线;
18.s2:使用const关键字限定目标,c6000编译器如果确定两条指令是不相关的,则安排它们并行执行,关键字const可以指定一个变量或者一个变量的存储单元保持不变;
19.s3:使用内联指令_add2(),将16位整数改为32位,调用_add2()一次完成两组16位整数的加法;
20.s4:用内联指令_add2、_mpyhl、_mpylh完成两组16位数的加法和乘法;
21.s5:用逻辑判断语句替代if...else...语句,减少跳转语句;
22.s6:实现16位的除法,被除数var1和除数var2都是整数,且var1<=var2,利用c6xx特有的指令subc,实现除法的循环移位相减操作;
23.s7:内联机制可以消除函数调用和返回带来的开销,利用dsp内联指令进行加速。
24.优选的,所述信息处理系统还包括数据flash、程序flash、rtc时钟芯片以及电源供电模块,数据flash选用型号为sst39vf800a,数据flash保存车道数、门限值、频点、保存时间间隔等用户信息,且系统定期将交通流量信息保存到数据flash,程序flash选用型号为sst39vf800a,程序烧进程序flash,再通过引导方式把程序下载到dsp的ram中运行,rtc时钟芯片选用型号为pcf8563,rtc时钟芯片采用3.3v供电,并且外接电池,以保证断电时该芯片仍然可以正常工作,且rtc时钟芯片内部的晶体振荡器在一周内为系统提供一次定时中断;
25.优选的,电源供电模块包括12v、5v、3.3v以及1.26v四种电源,其中12v电压由稳压器来提供,先由lm2596把12v电压转为5v电压,再由tps73hd301把5v电压分别转换为3.3v和1.26v电压,3.3v电源供ad芯片、tms320vc5502芯片外核、sst39vf800a芯片、cs8900a芯片、rtc时钟芯片使用。
26.优选的,服务程序:通过统一的接口和不同的传感器进行数据交互,服务程序负责对接口程序与传感器通信进行初始化和控制,传感器采集的数据存入数据库和接受管理中也的指令控制传感器工作,并对获得的数据信息统计计算,服务程序运行在操作系统中,随时向管理程序提供参数,以便来控制自身的运行状态,不随管理程序的开始退出而变化;
27.优选的,服务程序功能包括:
28.(1)监听端口:初始化,监测端口数据变化,收集传感器感知传送来的数据;
29.(2)校对检验数据:对数据进行归一化处理,向第h部分提供可靠的数据;
30.(3)存入数据:将校验通过的信息存储到数据库中;
31.(4)发送指令:依照管理程序指令运行并发送相应指令给传感器;
32.(5)退出关闭:退出接口程序,释放系统资源;
33.优选的,管理程序包括服务程序控制、系统登录、道路网显示、参数设置、数据的导入和导出五个子程序,负责启动、暂停、终止服务程序,并对控制信息数据和管理数据库中的信息;
34.优选的,服务程序控制对服务程序的状态进行控制和设置参数,包括归一程序状态控制子程序、发送控制指令子程序以及车流数据统计设置子程序三个子程序,其中归一程序状态控制子程序负责开始运行、暂停和退出归一程序,发送控制指令子程序按照协议发送控制指令给归一程序,车流数据统计设置子程序用于开始运行、退出此程序中的自动统计子程序并修改时间参数和肩用人工录入子程序来计算所需车流统计数据,并给出相应程序接口供道路网显示;
35.优选的,系统登录由校对检验用户、开始启动以及退出三部分构成,程序用于正式用户的进入、认证和退出,并监控非正式用户不能登录,校对检验用户用来对使用者提供的姓名、密码进行认证,开始调用启动程序,进入系统,退出用来释放资源,关闭程序;
36.优选的,道路网显示作用程序包括道路网生成、展示车流相关数据和计算车辆道路相关统计数据子程序,用于虚拟展示已预先键入的道路网和己统计出的此道路网的车流相关统计数据,道路网子程序将录入的道路网数据以图形的方式表示,车流信息显示子程序可在道路网界面上显示计算过的车流量信息;
37.优选的,参数设置功能程序对道路网、路口、传感器、采集方式等参数进行设置,包括道路网录入、路口录入、检测器录入和采集方式子程序,道路网录入子程序将道路网数据
导入数据库中,和数据库中道路表、道道路网络索引表对应,路口录入子程序用来把使用者键入的路口情况信息保存在数据库内,和道路网数据表对应,检测器录入子程序用来把检测器数据导入数据库中,和检测器表对应,采集方式子程序用来设置采集到的交通流数据的获得方式,和交通流原始数据表中的采集方式字段对应;
38.优选的,数据的导入和导出功能程序以xml的形式导入导出道路网数据、实时交通流信息以及车流量信息。
39.优选的,所述信息处理系统的输入端还设有交通数据库,其中,交通数据库中道路网对应数据库中道路表,索引关系对应道路网络索引表,道路网与路口为索引的多重复杂关系,路口类型对应数据库中的路口类型表,路口与路口类型为分类的多重照应单一的关系,路口与分类关系对应数据库中道路网数据表,路口与检测器为位置的单一照应多重关系,检测器类型对应数据库中的检测器类型表,检测器与检测器类型为分类的多重照应单一的关系,归一程序类型和注册关系对应数据库中的程序注册表,检测器与归一程序类型为注册的多重照应单一关系,检测关系对应数据库中交通流原始数据表,检测器与车为检测的多重复杂的关系,统计关系对应数据库中车流量表,检测器与时间为统计的多重复杂关系;
40.优选的,道路网路口分为进口和出口两种类型,而路网检测设备(检测器)需设在进口所在地址,截至此路口的全部进口个数相加就是进口数量,路口车流量是指安装在进口的所有检测设备检测到的车流信息累计相加,进口的检测器存放的是检测设备所有量和检测设备编号,统计开始路口和统计结束路口之间的距窝就是一个检测设备检测的路段,起始路口和目的路口之间的距离就是路段长度。
41.本发明的技术效果和优点:
42.本发明通过与各种交通信息采集检测器对接互联,实现了对实时交通信息的采集和统计,对实时道路网的显示控制,实现人车之间,车车之间、车路之间的全方位互通互联,结合互联网、无线网络、移动通信网等进行信息的传输和交换,采用智能技术进行全面的分析和实时信息处理,从而提高对车辆信息的采集能力,实现智能交通决策和增强对车辆的控制能力,完善和改进了传统交通信息采集技术的片面性、不准确性,使用功能都,可满足不同用户的需求。
附图说明
43.图1为本发明的整体框架图。
44.图2为本发明信息处理系统的结构示意图。
45.图3为本发明服务系统的结构示意图。
46.图4为本发明的整体结构示意图。
47.图5为本发明的工作流程图。
48.图6为本发明交通数据库的逻辑结构示意图。
具体实施方式
49.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于
本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
50.实施例1
51.请参阅附图1和图4
‑
5所示,一种基于人工智能的红外激光交通信息采集装置,与现有技术不同的是,包括数据采样系统、信息处理系统、服务系统、终端控制台以及人机互动模块。
52.数据采样系统:包括红外激光车速检测模块、道路占有率检测模块、车辆分类检测模块以及车辆计数模块,用于对道路实时交通状况数据采集;
53.所述红外激光车速检测模块包括磁力传感器、压电传感器视频图像传感器、频率调制连续波雷达传感器或声学传感器,其中磁力传感器与压电传感器为埋入道路地下使用,间接检测车速,视频图像传感器、频率调制连续波雷达传感器以及声学传感器为道路地上安装使用,连续测定车速;
54.所述道路占有率检测模块包括调频连续波雷达传感器、视频图像传感器以及环形感应线圈传感器,调频连续波雷达传感器的顶置正向安装时误差<
±
2%,路旁安装时误差<
±
5%,准确率>98%;
55.所述车辆分类检测模块包括环形感应线圈传感器、视频图像传感器、压电传感器、微波雷达传感器以及红外线传感器,进行车辆分类的检测,环形感应线圈传感器通过测量车长智能分类,视频图像传感器通过捕捉相关图像获得车辆的外形特征等信息进行分类,压电传感器通过获取车辆的轴数和轴距对车辆进行分类,微波雷达传感器通过发射合适的雷达波进行分类,红外线传感器通过发射合适的红外线来感知车辆长度,并进行适当的信息处理实现车辆分类;
56.所述车辆计数模块包括环形感应线圈传感器、磁力传感器、视频图像传感器、感应线圈传感器、视频图像传感器、微波雷达、红外线传感器、超声波传感器、声学传感器以及埋入式传感器,进行车辆计数值的采集,环形感应线圈传感器、磁力传感器、视频图像传感器等在车流量比较小的环境条件下进行检测,感应线圈传感器、视频图像传感器和微波雷达在车流量比较大的环境条件进行检测,红外线传感器、超声波传感器、声学传感器在对车流量数值精度要求不高的情况下使用,其中,埋入式传感器对车流量数值的检测准确度达99%w;
57.采用微波雷达从目标反射回来的回波频率和发射频率的变化规律相同,发射频率和回波频率之差可以表征探测目标与雷达之间的距离,对于一定距离r的目标回波,除去在t轴上很小一部分2r/c以外(差频急剧下降为0),其它时间差频是不变的,由此可以得出目标距离r为
58.实施例2
59.请参阅附图2所示,信息处理系统:通过互联网传输收到数据采样系统收集的数据后,对数据进行分析、处理,并在保存数据后将数据发送至服务系统;
60.所述信息处理系统包括处理芯片、adc模块以及网络传输模块,处理芯片选用型号为tms320vc5502芯片,主频为300m,处理芯片把ad芯片采集过后的数据进行算法处理,统计出实时交通信息并进行网络传输,adc模块选用型号为ths1206,中频信号输入到ad芯片进
行采样,adc模块实现中频信号数字化,网络传输模块由cs8900a芯片和隔离变压器组成,负责把数据通过网络传输到客户pc终端;
61.处理芯片算法加速包括:
62.s1:将多层或者双层循环改为单层循环,让循环只形成一个pipeline,充分利用dsp的流水线;
63.s2:使用const关键字限定目标,c6000编译器如果确定两条指令是不相关的,则安排它们并行执行,关键字const可以指定一个变量或者一个变量的存储单元保持不变;
64.s3:使用内联指令_add2(),将16位整数改为32位,调用_add2()一次完成两组16位整数的加法;
65.s4:用内联指令_add2、_mpyhl、_mpylh完成两组16位数的加法和乘法;
66.s5:用逻辑判断语句替代if...else...语句,减少跳转语句;
67.s6:实现16位的除法,被除数var1和除数var2都是整数,且var1<=var2,利用c6xx特有的指令subc,实现除法的循环移位相减操作;
68.s7:内联机制可以消除函数调用和返回带来的开销,利用dsp内联指令进行加速。
69.所述信息处理系统还包括数据flash、程序flash、rtc时钟芯片以及电源供电模块,数据flash选用型号为sst39vf800a,数据flash保存车道数、门限值、频点、保存时间间隔等用户信息,且系统定期将交通流量信息保存到数据flash,程序flash选用型号为sst39vf800a,程序烧进程序flash,再通过引导方式把程序下载到dsp的ram中运行,rtc时钟芯片选用型号为pcf8563,rtc时钟芯片采用3.3v供电,并且外接电池,以保证断电时该芯片仍然可以正常工作,且rtc时钟芯片内部的晶体振荡器在一周内为系统提供一次定时中断;
70.电源供电模块包括12v、5v、3.3v以及1.26v四种电源,其中12v电压由稳压器来提供,先由lm2596把12v电压转为5v电压,再由tps73hd301把5v电压分别转换为3.3v和1.26v电压,3.3v电源供ad芯片、tms320vc5502芯片外核、sst39vf800a芯片、cs8900a芯片、rtc时钟芯片使用。
71.实施例3
72.请参阅附图3所示,服务系统:服务系统包括服务程序和管理程序,将数据归一化处理并依照程序将处理后的数据发送至终端控制台以及人机互动模块;
73.服务程序:通过统一的接口和不同的传感器进行数据交互,服务程序负责对接口程序与传感器通信进行初始化和控制,传感器采集的数据存入数据库和接受管理中也的指令控制传感器工作,并对获得的数据信息统计计算,服务程序运行在操作系统中,随时向管理程序提供参数,以便来控制自身的运行状态,不随管理程序的开始退出而变化;
74.服务程序功能包括:
75.(6)监听端口:初始化,监测端口数据变化,收集传感器感知传送来的数据;
76.(7)校对检验数据:对数据进行归一化处理,向第h部分提供可靠的数据;
77.(8)存入数据:将校验通过的信息存储到数据库中;
78.(9)发送指令:依照管理程序指令运行并发送相应指令给传感器;
79.(10)退出关闭:退出接口程序,释放系统资源;
80.管理程序包括服务程序控制、系统登录、道路网显示、参数设置、数据的导入和导
出五个子程序,负责启动、暂停、终止服务程序,并对控制信息数据和管理数据库中的信息;
81.服务程序控制对服务程序的状态进行控制和设置参数,包括归一程序状态控制子程序、发送控制指令子程序以及车流数据统计设置子程序三个子程序,其中归一程序状态控制子程序负责开始运行、暂停和退出归一程序,发送控制指令子程序按照协议发送控制指令给归一程序,车流数据统计设置子程序用于开始运行、退出此程序中的自动统计子程序并修改时间参数和肩用人工录入子程序来计算所需车流统计数据,并给出相应程序接口供道路网显示;
82.系统登录由校对检验用户、开始启动以及退出三部分构成,程序用于正式用户的进入、认证和退出,并监控非正式用户不能登录,校对检验用户用来对使用者提供的姓名、密码进行认证,开始调用启动程序,进入系统,退出用来释放资源,关闭程序;
83.道路网显示作用程序包括道路网生成、展示车流相关数据和计算车辆道路相关统计数据子程序,用于虚拟展示已预先键入的道路网和己统计出的此道路网的车流相关统计数据,道路网子程序将录入的道路网数据以图形的方式表示,车流信息显示子程序可在道路网界面上显示计算过的车流量信息;
84.参数设置功能程序对道路网、路口、传感器、采集方式等参数进行设置,包括道路网录入、路口录入、检测器录入和采集方式子程序,道路网录入子程序将道路网数据导入数据库中,和数据库中道路表、道道路网络索引表对应,路口录入子程序用来把使用者键入的路口情况信息保存在数据库内,和道路网数据表对应,检测器录入子程序用来把检测器数据导入数据库中,和检测器表对应,采集方式子程序用来设置采集到的交通流数据的获得方式,和交通流原始数据表中的采集方式字段对应;
85.数据的导入和导出功能程序以xml的形式导入导出道路网数据、实时交通流信息以及车流量信息。
86.请参阅附图6所示,所述信息处理系统的输入端还设有交通数据库,其中,交通数据库中道路网对应数据库中道路表,索引关系对应道路网络索引表,道路网与路口为索引的多重复杂关系,路口类型对应数据库中的路口类型表,路口与路口类型为分类的多重照应单一的关系,路口与分类关系对应数据库中道路网数据表,路口与检测器为位置的单一照应多重关系,检测器类型对应数据库中的检测器类型表,检测器与检测器类型为分类的多重照应单一的关系,归一程序类型和注册关系对应数据库中的程序注册表,检测器与归一程序类型为注册的多重照应单一关系,检测关系对应数据库中交通流原始数据表,检测器与车为检测的多重复杂的关系,统计关系对应数据库中车流量表,检测器与时间为统计的多重复杂关系;
87.道路网路口分为进口和出口两种类型,而路网检测设备(检测器)需设在进口所在地址,截至此路口的全部进口个数相加就是进口数量,路口车流量是指安装在进口的所有检测设备检测到的车流信息累计相加,进口的检测器存放的是检测设备所有量和检测设备编号,统计开始路口和统计结束路口之间的距窝就是一个检测设备检测的路段,起始路口和目的路口之间的距离就是路段长度。
88.请参阅附图1所示,终端控制台:交管部门通过终端控制台操控数据采样系统。
89.请参阅附图1所示,人机互动模块:收集服务系统处理数据后,将数据通过多媒体设备发布。
90.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语
″
安装
″
、
″
相连
″
、
″
连接
″
应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,
″
上
″
、
″
下
″
、
″
左
″
、
″
右
″
等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
91.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
92.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1