一种基于3D结构光检测的交通枢纽区域安全分析装置的制作方法
一种基于3d结构光检测的交通枢纽区域安全分析装置
技术领域
1.本发明涉及智慧交通技术领域,具体是一种基于3d结构光检测的交通枢纽区域安全分析装置。
背景技术:
2.建设交通强国是重要的战略决策,随着高铁、城市轨道交通的兴起,全国各地加快了综合交通枢纽建设,作为各种交通运输方式的节点,交通枢纽区域安全是一项重要工作。因此,如何有效区分交通枢纽内的各运营主体、物体的运动轨迹及未来时间段内的运行轨迹,根据运行轨迹做出有效预警,降低事故发生率,为交通枢纽的安全运营提供保障是非常重要的。传统交通枢纽的安全需靠监管人员对实时的视频进行监控,对区域内的各交通体无法进行运行轨迹的预判。
技术实现要素:
3.本发明的目的在于提供一种基于3d结构光检测的交通枢纽区域安全分析装置,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.一种基于3d结构光检测的交通枢纽区域安全分析装置,利用点阵投射器向视频采集区域投射发出特定编码的红外光点,经过被拍摄物体反射回摄像机,摄像机模组追踪投射光斑的偏移,对比收发两端不同光点的偏移位置,从而获取物体表面的景深信息,并通过景深图像信息进行3d建模。设备内置的深度3d深度算法,结合视频跟踪分析算法,锁定区域内物体的运行速度、运行轨迹、未来时间段内运行轨迹预判等信息,并通过4g/5g通讯模块或对外接口将实时分析数据上传到中心平台或传输给外接设备。
6.一种基于3d结构光检测的交通枢纽区域安全分析装置,包括电源控制单元、核心控制处理单元、结构光装置单元、摄像机单元、图像处理单元、无线通讯单元、外部接口单元、内部存储单元组成;所述的核心控制处理单元包括arm cpu芯片、控制内存芯片、视频存储芯片;所述的结构光装置单元包括红外光发射模组和红外光接收模组;所述的摄像机单元包括红外摄像机模组;所述的图像处理单元包括视频编解码芯片、图像处理芯片、视频输出接口部分;所述的无线通讯单元包括4g/5g通讯模块、wifi模块;所述的对外接口单元包括gpio接口、rs232/485接口、can接口、网络接口、usb接口、cf卡接口;所述的电源单元包括给各个显示控制部分和芯片提供电源;所述的内部存储单元包括与arm cpu相连接的ram、rom芯片;所述的电源控制单元将dc12v或dc24v电源转换成装置中各模块、各芯片所需的dc12v、dc5v、dc3.3v、dc2.5v、dc1.8v电源。
7.一种基于3d结构光检测的交通枢纽区域安全分析装置,其包括:
8.1)利用点阵投射器向视频采集区域投射发出特定编码的红外光点,经过被拍摄物体反射回摄像机,摄像机模组追踪投射光斑的偏移,对比收发两端不同光点的偏移位置,从而获取物体表面的景深信息,并通过景深图像信息进行3d建模。
9.2)设备采用arm内核处理器,内置3d结构光深度算法,通过人工智能学习点阵模型和相邻点阵分布,能够快速识别出最佳结构光,优化设备容错能力,提升设备测量精度。
10.3)设备利用已建3d模型,通过对实时景深图像的分析,根据分析后的图形进行分类,将有效区分交通枢纽区域内的机动车辆、行人和非机动车辆,将分析后的物体进分类标记。
11.4)设备采用的fpga芯片,内置视频追踪算法,通过锁定同一个物体位在固定时间内的位置改变,利用位置变量和时间变量,计算出改物体的实时运动速度。通过锁定物体之间的实时位置信息、实时速度信息、相对速度信息,跟进当前已知变量信息,预估物体未来一段时间内的运行轨迹,跟进运行轨迹进行预警研判。
12.5)利用4g/5g无线通信接口或网络接口,实时将区域内检测物体的运行速度、运行轨迹、以及通过运行轨迹进行预警数据上传导中心,并接受平台端的实时抓拍指令。
13.6)利用usb接口、cf卡接口,可以将视频图像信息、3d模型信息、物体运行速度信息、运动轨迹信息、运行轨迹预警进行备份和存储。
14.与现有技术相比,本发明的3d结构光检测的交通枢纽区域安全分析装置,其检测采集不受枢纽区域内外界因素影响,处理算法集成与前端设备,设备能及时处理分析数据,支持全天候数据采集分析。
附图说明
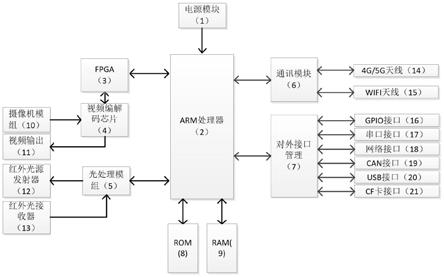
15.图1为一种基于3d结构光检测的交通枢纽区域安全分析装置的系统框图。
16.图2为一种基于3d结构光检测的交通枢纽区域安全分析装置的原理框图。
17.图中:1、电源模块;2、arm处理器;3、fpga;4、视频编解码芯片;5、光处理模组;6、通讯模块;7、对外接口管理;8、rom;9、ram;10、摄像机模组;11、视频输出;12、红外光源发射器;13、红外光接收器;14、4g/5g天线;15、wifi天线;16、gpio接口;17、串口接口;18、网络接口;19、can接口;20、usb接口;21、cf卡接口。
具体实施方式
18.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
19.请参阅图1-图2,一种基于3d结构光检测的交通枢纽区域安全分析装置,包括电源管理1、arm处理器2、fpga3、视频编解码芯片4、光处理模组5、通讯模块6和摄像机模组10,所述的电源管理1给所述的arm处理器2、fpga3、视频编解码芯片4、光处理模组5、通讯模块6、摄像机模组10供电;所述的摄像机模组10将实时视频信息通过视频编解码芯片4传输给所述的fpga3;所述的光处理模组5将控制红外光源发射器12、红外光接收器13工作,并将测量获得数据传输给arm处理器2(主控制处理单元);所述的主控制处理单元与所述的fpga3、光处理模组5、通讯模块6、对外接口管理7、rom8、ram9进行通讯;所述的对外接口管理7通过所述的gpio接口16、串口接口17、网络接口18、can接口19、usb接口20、cf卡接口21与外部设备进行数据交互。
20.一种基于3d结构光检测的交通枢纽区域安全分析装置,其包括:
21.(1)利用点阵投射器向视频采集区域投射发出特定编码的红外光点,经过被拍摄物体反射回摄像机,摄像机模组追踪投射光斑的偏移,对比收发两端不同光点的偏移位置,
从而获取物体表面的景深信息,并通过景深图像信息进行3d建模。
22.(2)设备采用arm内核处理器,内置3d结构光深度算法,通过人工智能学习点阵模型和相邻点阵分布,能够快速识别出最佳结构光,优化设备容错能力,提升设备测量精度。
23.(3)设备利用已建3d模型,通过对实时景深图像的分析,根据分析后的图形进行分类,将有效区分交通枢纽区域内的机动车辆、行人和非机动车辆,将分析后的物体进分类标记。
24.(4)设备采用的fpga芯片,内置视频追踪算法,通过锁定同一个物体位在固定时间内的位置改变,利用位置变量和时间变量,计算出改物体的实时运动速度。通过锁定物体之间的实时位置信息、实时速度信息、相对速度信息,跟进当前已知变量信息,预估物体未来一段时间内的运行轨迹,跟进运行轨迹进行预警研判。
25.(5)利用4g/5g无线通信接口或网络接口,实时将区域内检测物体的运行速度、运行轨迹、以及通过运行轨迹进行预警数据上传导中心,并接受平台端的实时抓拍指令。
26.(6)利用usb接口、cf卡接口,可以将视频图像信息、3d模型信息、物体运行速度信息、运动轨迹信息、运行轨迹预警进行备份和存储。
27.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1