一种车辆电子哨兵预警监测系统的制作方法
1.本实用新型属于实时监测技术改进领域,尤其涉及一种车辆电子哨兵预警监测系统。
背景技术:
2.现有特斯拉哨兵模式系统,在停车状态下常电工作,功耗大,对续航里程有较大影响, 无法应用到燃油车和部分新能源车辆,特斯拉的系统的8个摄像头都加入哨兵模式工作,对于视频记录单元都有较大影响,目前市场上现有的360度全景系统在整车下电状态下不工作。
3.现有系统一般采用g
‑
sensor传感器或g
‑
sensor和摄像头同时监控的方式,监控车辆是否碰撞或有移动物体靠近;不能通过手机应用程序远程通知用户。
4.仅采用g
‑
sensor仅能识别车辆是否碰撞,没有视频记录证据。同时使用g
‑
sensor和摄像头可以监测碰撞和记录视频,但该方式摄像头需要一直工作功耗大,长时间停车容易导致车辆蓄电池馈电不能启动车辆,该方式不适用于燃油车。若g
‑
sensor监测到碰撞后再唤醒摄像头记录仅能记录碰撞后的视频,不能记录碰撞前和碰撞时刻的视频。
技术实现要素:
5.本实用新型的目的在于提供一种车辆电子哨兵预警监测系统,旨在解决现有技术需常电工作存在系统功耗大容易导致车身蓄电池馈电,没有引入2
‑
4个低成本毫米波雷达视频记录信息不完整,360全景系统不能被唤醒,不能通过手机远程通知用户,无法手机主动触发查询的技术问题。
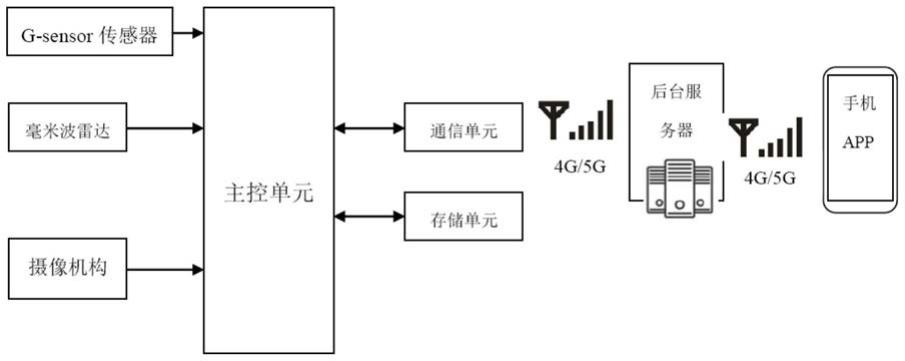
6.本实用新型是这样实现的,一种车辆电子哨兵预警监测系统,所述车辆电子哨兵预警监测系统包括数据采集单元、主控单元、存储单元、通信单元、后台服务器及移动智能终端,数据采集单元的输出端连接所述主控单元的输入端,所述主控单元连接所述存储单元双向通信,所述主控单元连接所述通信单元双向通信,所述通信单元通信连接所述后台服务器,所述后台服务器通信连接所述移动智能终端。
7.本实用新型的进一步技术方案是:所述数据采集单元包括g
‑
sensor传感器、毫米波雷达及摄像机构,所述g
‑
sensor传感器的输出端连接所述主控单元的输入端,所述毫米波雷达的输出端连接所述主控单元的输入端,所述摄像机构的输出端连接所述主控单元的输入端。
8.本实用新型的进一步技术方案是:所述毫米波雷达为车辆自动的24g或77g毫米波雷达,所述毫米波雷达2个或者4个。
9.本实用新型的进一步技术方案是:所述摄像机构采用的是车辆自带的360度全景摄像头或行车记录仪摄像头。
10.本实用新型的进一步技术方案是:所述通信单元采用的是车载t
‑
box或者主控单元自带4g/5g模块,所述车载t
‑
box或者主控单元自带通信模块连接所述后台服务器。
11.本实用新型的进一步技术方案是:所述后台服务器通过4g/5g通信连接所述移动智能终端。
12.本实用新型的进一步技术方案是:所述存储单元采用的是emmc存储芯片或sd卡或u盘。
13.本实用新型的进一步技术方案是:所述移动智能终端采用的是智能手机或智能平板或平板电脑。
14.本实用新型的进一步技术方案是:所述主控单元采用的是车载系统中的主控器用于处理g
‑
sensor和毫米波雷达传感器发出的系统唤醒信号、视频记录、连接t
‑
box实现手机应用软件远程警报和远程访问功能。
15.本实用新型的有益效果是:采用g
‑
sensor和毫米波雷达结合方案不仅能监测碰撞也能监测潜在的碰撞风险,可减小g
‑
sensor无法感知的轻微擦碰的漏报,传感器功耗低降低蓄电池馈电风险,可同时适用于燃油车辆和电动车辆。结合4g/5g移动通信和手机应用软件,能够在危险发生时及时通知用户,用户通过手机应用软件远程访问查看车辆周边视频画面实现远程监控。
附图说明
16.图1是本实用新型实施例提供的车辆电子哨兵预警监测系统的结构框图。
具体实施方式
17.如图1所示,本实用新型提供的车辆电子哨兵预警监测系统,所述车辆电子哨兵预警监测系统包括数据采集单元、主控单元、存储单元、通信单元、后台服务器及移动智能终端,数据采集单元的输出端连接所述主控单元的输入端,所述主控单元连接所述存储单元双向通信,所述主控单元连接所述通信单元双向通信,所述通信单元通信连接所述后台服务器,所述后台服务器通信连接所述移动智能终端。通过结合毫米波雷达系统能够有效的实现有车辆靠近就会唤醒摄像头的监控,能够完整的录制碰撞前后的整个过程,为交通部门判断哪方承担责任提供了有效的证据。
18.主控单元用于处理g
‑
sensor和毫米波雷达传感器发出的系统唤醒信号、视频记录、连接t
‑
box实现手机应用软件远程警报和远程访问功能。当检测到系统唤醒信号,主控单元控制唤醒各摄像头工作并记录各摄像头视频文件到存储介质中,同时通过t
‑
box连接4g/5g移动网络向用户手机远程发送警报信息通知用户,用户可以通过手机应用程序主动唤醒系统,远程访问查看或下载车辆四周视频画面或文件。
19.后台服务器用于连接手机和系统主控单元实现手机应用程序远程报警和远程访问功能。
20.t
‑
box:车载t
‑
box(telematics box,简称),车联网系统包含四部分,主机、车载t
‑
box、手机app及后台系统。主机主要用于车内的影音娱乐,以及车辆信息显示;车载t
‑
box主要用于和后台系统/手机app通信,实现手机app的车辆信息显示与控制。
21.g
‑
sensor传感器用于检测车辆是否碰撞或者被破窗入侵,毫米波雷达用于检测是否有移动物体靠近,当检测到碰撞或有移动物体靠近时发出系统唤醒信号。
22.所述数据采集单元包括g
‑
sensor传感器、毫米波雷达及摄像机构,所述g
‑
sensor
传感器的输出端连接所述主控单元的输入端,所述毫米波雷达的输出端连接所述主控单元的输入端,所述摄像机构的输出端连接所述主控单元的输入端。
23.所述毫米波雷达为车辆自动的24g或77g毫米波雷达,所述毫米波雷达2个或者4个。毫米波雷达可以共用车上现有的24g或77g毫米波雷达。
24.所述摄像机构采用的是车辆自带的360度全景摄像头或行车记录仪摄像头。摄像头可以共用360全景摄像头、行车记录仪摄像头等,用于在接收到上述系统唤醒信号后立即唤醒并采集车辆四周视频画面。
25.所述通信单元采用的是车载t
‑
box或者主控单元自带4g/5g模块,所述车载t
‑
box或者主控单元自带通信模块连接所述后台服务器。t
‑
box用于实现4g/5g移动通信功能,可共用原车t
‑
box或在主控单元中内置4g/5g移动通信模块。
26.所述后台服务器通过4g/5g通信连接所述移动智能终端。
27.所述存储单元采用的是emmc存储芯片或sd卡或u盘。存储单元包含不仅限于emmc存储芯片、sd卡、u盘等移动存储工具。
28.所述移动智能终端采用的是智能手机或智能平板或平板电脑。
29.所述主控单元采用的是车载系统中的主控器用于处理g
‑
sensor和毫米波雷达传感器发出的系统唤醒信号、视频记录、连接t
‑
box实现手机应用软件远程警报和远程访问功能。
30.为了防止系统唤醒后对车辆蓄电池电量消耗过大导致蓄电池馈电车辆不能启动,主控单元具有蓄电池电压和soc监测功能,系统实时监测蓄电池电压和soc状态当达到设定阀值时关闭系统工作。系统还具有工作唤醒次数设置、系统工作时长设置和系统开关设置功能,用户可根据需要进行设置进一步减小电池馈电风险。
31.本技术主要是结合行车记录仪,同时引入2
‑
4个毫米波雷达,把g
‑
sensor 做为辅助选择项。 考虑车辆配置和燃油车等特殊需求。 系统通过监控整车电压或者电池soc,避免电池馈电和车辆无法启动等现象,依托低成本毫米波雷达或者g
‑
sensor作为系统触发和激活的传感器。
32.本技术采用g
‑
sensor和毫米波雷达同时监控车辆是否碰撞或有移动物体靠近,可以实现低能耗,毫米波雷达监测到移动物体靠近时唤醒摄像头记录视频可以实现存在潜在碰撞风险时的视频记录,可减小g
‑
sensor无法感知的轻微擦碰的漏报,当有碰撞发生时可实现整个碰撞过程的视频记录。摄像头共用行车记录仪、360全景系统摄像头等,提高车身摄像头利用率。碰撞发生时可以通过手机应用软件第一时间通知用户,用户采用手机应用软件远程查看车辆四周视频画面,实现车辆的电子哨兵监控功能,客户可以远程打开哨兵模式观看车辆周围状况,解决客户“犹豫是否出门”的安全担忧,也可以在车主忘记停车位置的情况下,手机启动哨兵模式拍摄周围环境,协助找车,特别是解决在陌生大型停车场找车的担忧。
33.本技术通过g
‑
senor和毫米波雷达监测到车辆碰撞时,在触发车辆报警的同时可通过手机应用软件第一时间通知用户,用户采用手机应用软件远程查看车辆四周视频画面。现车辆的电子哨兵监控功能。
34.本技术采用g
‑
sensor和毫米波雷达结合方案不仅能监测刮蹭,偷窃、入侵等,也能监测潜在的碰撞风险,采用触发记录和报警方式(避免常电工作方式),避免蓄电池馈电和
新能源续航里程影响,可同时适用于燃油车辆和电动车辆。
35.本技术共用车辆现有的360
°
环视摄像头、行车记录仪摄像头监控摄像头等,实现采集车辆四周视频画面的采集记录。
36.本技术技术结合移动通信和手机应用软件,能够在危险发生时及时通知用户,用户通过手机应用软件远程访问查看车辆周边视频画面实现远程监控。
37.系统通过车辆蓄电池监测功能、唤醒次数设置、工作时长设置、开关设置等措施,防止因系统电流损耗过大导致蓄电池馈电。
38.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1