一种地下停车场车辆快速重定位的系统的制作方法
1.本实用新型属于自动驾驶定位及自主泊车定位技术领域,尤其涉及一种地下停车场车辆快速重定位的系统。
背景技术:
2.现有的封闭场景如地下停车场环境中,常用以下重定位方法:
3.一、通过场端建设uwb或激光设备与车辆进行通信告知车辆位置。
4.二、通过建立高精度地图或稠密的激光点云,通过匹配场景中的结构化道路标识物或匹配点云特征,给出多个候选的位置通过滤波器收敛在运动中到合适的位置。
5.但通过场端建设uwb或激光设备与车辆进行通信告知车辆位置需要投入很大的建设与后续维护成本。而通过建立高精度地图或稠密的激光点云,通过匹配场景中的结构化道路标识物或匹配点云特征,给出多个候选的位置通过滤波器收敛在运动中到合适的位置在缺少明确语义时无法使用;同时,道路标识物语义信息在地下停车场中具有很高的重复率,在大型场景中收敛速度很慢,影响用户体验,且点云特征需要较长时间的匹配、存储空间有较大的需求。
技术实现要素:
6.本实用新型实施例提供一种地下停车场车辆快速重定位的系统,旨在解决背景技术中提出的问题。
7.本实用新型实施例是这样实现的,一种地下停车场车辆快速重定位的系统,该系统包括数据库、环视系统、提取模块、地图匹配单元、定位模块以及控制单元;
8.所述数据库用于存储停车场电子地图;
9.所述环视系统用于实时采集相机图像,并对所述相机图像进行预处理;
10.所述提取模块用于接收预处理图像,从所述预处理图像中提取感知信息;
11.所述地图匹配单元用于将所述感知信息与所述停车场电子地图进行匹配,判断是否存在唯一定位结果,并输出反馈信号;
12.所述反馈信号包括表示存在唯一定位结果的第一信号以及表示未存在唯一定位结果的第二信号;
13.所述定位模块接收所述第一信号,获取唯一定位结果,输出车辆位置或接收所述第二信号,生成少数候选区域信息,将所述候选区域信息与所述停车场电子地图进行比对,输出车辆位置。
14.优选的,所述停车场电子地图至少包括场景障碍物信息、路面标识物信息和特征点云信息。
15.优选的,所述特征点云信息至少包括停车频率高的下客区、出入口以及相对危险的转弯区域。
16.优选的,所述感知信息至少包括场景分类信息、道路目标信息、字符目标信息、障
碍物形态信息以及点云特征信息。
17.优选的,所述场景分类信息至少包括闸机区域、上坡区域、下坡区域、左车道、右车道、调头区域、入口区域、出口区域、十字路口、t字入口、停车位区域以及电梯口区域。
18.优选的,所述道路目标信息至少包括停车位、减速带、车道分割线、道钉、斑马线、地面箭头、地面立柱以及禁停标识线。
19.优选的,所述字符目标信息为停车位编号。
20.优选的,所述障碍物形态信息至少包括障碍物种类信息以及障碍物形状信息;
21.所述障碍物种类至少包括墙壁、过道、狭窄通道以及立柱型突出物。
22.优选的,所述点云特征信息为orb特征点。
23.该系统对封闭场景,可有效的实现车辆在封闭环境中的定位效率;充分利用环境信息,采用车载环视系统,节省场端设备的成本;同时,通过提取自车周边多样化视觉特征,减少候选区域,加快迭代速率,更快收敛的准确位置甚至直接获取重定位结果,可有效的解决现有方案缺少语义信息无法快速收敛的问题。
附图说明
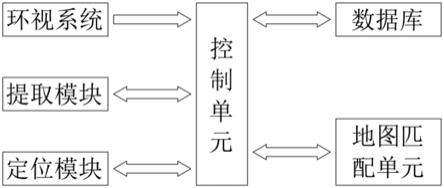
24.图1是一种地下停车场车辆快速重定位的系统的系统架构示意图。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.本实用新型提供一种地下停车场车辆快速重定位的系统,如图1所示,该系统包括数据库、环视系统、提取模块、地图匹配单元、定位模块以及控制单元。
27.所述数据库用于存储停车场电子地图;其中,所述停车场电子地图至少包括场景障碍物信息、路面标识物信息和特征点云信息;所述特征点云信息至少包括停车频率高的下客区、出入口以及相对危险的转弯区域。
28.所述环视系统用于实时采集相机图像,并对所述相机图像进行预处理;
29.所述提取模块用于接收预处理图像,从所述预处理图像中提取感知信息;其中,所述感知信息至少包括场景分类信息、道路目标信息、字符目标信息、障碍物形态信息以及点云特征信息;所述场景分类信息至少包括闸机区域、上坡区域、下坡区域、左车道、右车道、调头区域、入口区域、出口区域、十字路口、t字入口、停车位区域以及电梯口区域;所述道路目标信息至少包括停车位、减速带、车道分割线、道钉、斑马线、地面箭头、地面立柱以及禁停标识线;所述字符目标信息为停车位编号;所述障碍物形态信息至少包括障碍物种类信息以及障碍物形状信息;所述障碍物种类至少包括墙壁、过道、狭窄通道以及立柱型突出物;所述点云特征信息为orb特征点。
30.所述地图匹配单元用于将所述感知信息与所述停车场电子地图进行匹配,判断是否存在唯一定位结果,并输出反馈信号;
31.所述反馈信号包括表示存在唯一定位结果的第一信号以及表示未存在唯一定位结果的第二信号;
32.所述定位模块接收所述第一信号,获取唯一定位结果,输出车辆位置或接收所述第二信号,生成少数候选区域信息,将所述候选区域信息与所述停车场电子地图进行比对,输出车辆位置。
33.车辆定位时,由车载环视系统获取车辆自身周边环境图像信息,并对图像进行预处理后传输至控制单元,提取模块从控制单元接收预处理图像,提取预处理图像内的闸机区域、上坡区域、下坡区域、左车道、右车道、调头区域、入口区域、出口区域、十字路口、t字入口、停车位区域、电梯口区域、停车位、减速带、车道分割线、道钉、斑马线、地面箭头、地面立柱、禁停标识线、停车位编号、墙壁、过道、狭窄通道、立柱型突出物以及orb特征点等感知信息,控制单元接收感知信息后将感知信息传送至地图匹配单元内,并调取数据库内预存的停车场电子地图与感知信息进行匹配,判断感知信息与停车场地图内的场景障碍物信息、路面标识物信息、停车频率高的下客区、出入口以及相对危险的转弯区域信息进行比对,判断是否存在感知信息是否存在与停车场电子地图内数据一致的位置点,若存在则向控制单元发送第一信号,通过定位模块获取该位置点输出作为车辆重定位点,完成车辆定位;若不存在,通过定位滤波算法迭代优化筛分,得出车辆处于停车场中的位置,完成车辆定位。
34.该系统针对封闭场景,可有效的实现车辆在封闭环境中的定位效率;充分利用环境信息,采用车载环视系统,节省场端设备的成本;同时,通过提取自车周边多样化视觉特征,减少候选区域,加快迭代速率,更快收敛的准确位置甚至直接获取重定位结果,可有效的解决现有方案缺少语义信息无法快速收敛的问题。
35.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1