一种车路协同自主代客泊车停泊诱导方法与流程
1.本发明属于自动驾驶泊车技术领域,具体涉及一种车路协同自主代客泊车停泊诱导方法。
背景技术:
2.自主代客泊车开始步入人民的生活中,这不仅得益于人工智能技术、计算机技术、传感器技术和车辆工程技术的飞速发展,更是当下日趋紧张的土地资源和攀升的车辆保有率的真实反应。但是,单车智能的自主代客泊车系统缺乏全覆盖的感知能力与全时空的决策能力,导致该技术的推广受限。为克服这些问题,将路侧信息与车端信息融合的车路协同自主代客泊车系统是未来的发展趋势。但是,在车路协同模式下,多车或群车的停泊诱导如何保证交通系统的有序稳定成为了极大地挑战。
3.因此,如何提供基于车路协同技术的多智能车辆自主代客泊车停泊诱导方法是本领域技术人员亟待解决的问题。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种车路协同自主代客泊车停泊诱导方法。
5.本发明的目的可以通过以下技术方案来实现:
6.一种车路协同自主代客泊车停泊诱导方法,包括以下步骤:
7.s1:单个车辆停泊的客观成本建模;
8.s2:单个车辆停泊的主观成本建模;
9.s3:停泊诱导约束建模;
10.s4:停泊诱导总成本建模;
11.s5:停泊诱导问题模型的建立;
12.s6:适应度函数设计;
13.s7:自适应蚁群算法求解停泊诱导问题。
14.进一步地,步骤s1中,静态场景下,待泊车辆i诱导泊入停车场j的单个车辆停泊的客观成本g
i,j
建模为g
i,j
=(wfs
i,j
+pj)x
i,j
,其中,待泊车辆序号i=1,
…
,n,n为待泊车辆总数;停车场序号j=1,
…
,m,m为停车场总数;wf为单位里程油耗折算的价格系数;s
i,j
为停泊行车里程,表示从放下用户目的地到目标停车场的停泊行车里程;pj为在停车场j的停泊费用;x
i,j
={0,1}是一个布尔量,为1表示车辆i停泊到停车场j,为0表示车辆i不停泊到停车场j。
15.进一步地,步骤s1中,动态场景下,对于第k个诱导时刻,待泊车辆i诱导泊入停车场j的单个车辆停泊的客观成本g
i,j,k
建模为g
i,j,k
=(wfs
i,j,k
+pj)x
i,j,k
,其中,s
i,j
为第k个诱导时刻的停泊行车里程,表示从放下用户目的地到目标停车场的停泊行车里程;pj为在停车场j的停泊费用;x
i,j,k
={0,1}是一个布尔量,为1表示车辆i在第k个诱导时刻停泊到停车
场j,为0表示车辆i在第k个诱导时刻不停泊到停车场j。
16.进一步地,步骤s2中,静态场景下,待泊车辆i停泊的主观成本hi建模为其中,w
s,i,j
为考虑停泊油耗的用户停泊意愿系数;w
p,j
为考虑停泊费用的用户停泊意愿系数;r≥0为待泊车辆i未分配到停车场导致原地等待的用户停泊意愿参数。考虑停泊油耗的用户停泊意愿系数w
s,i,j
设计为其中,cs≥0为当地居民消费水平对应的油耗心理承受系数,一般取为1;s
max
为居民可接受的最大停泊行车里程。考虑停泊费用的用户停泊意愿系数w
p,j
设计为建模为其中,c
p
≥0为当地居民消费水平对应的停泊费用心理承受系数,一般取为1;p
max
为居民可接受的最大停泊费用。
17.进一步地,步骤s2中,动态场景下,对于第k个诱导时刻,待泊车辆i停泊的主观成本h
i,k
建模为其中,w
s,i,j,k
为考虑停泊油耗的用户停泊意愿系数;ρ》1为心理意愿增强系数,值越大,表明心理意愿越强大;k
i,0
为第i辆车首次进行停泊诱导的时刻。考虑停泊油耗的用户停泊意愿系数w
s,i,j,k
设计为
18.进一步地,步骤s3中,静态场景下,由于1辆待泊车辆最多能占用1个停车位,有停泊诱导约束为
19.进一步地,步骤s3中,静态场景下,由于1个停车位最多可以服务1辆待泊车辆,有停泊诱导约束为其中,nj表示第j个停车场的可用停车位总数。
20.进一步地,步骤s3中,动态场景下,由于同一个诱导时刻k,1辆待泊车辆最多能占用1个停车位,有停泊诱导约束为
21.进一步地,步骤s3中,动态场景下,由于同一个诱导时刻k,1个停车位最多可以服务1辆待泊车辆,有停泊诱导约束为其中,uk为第k个诱导时刻内的待泊车辆总数;v
j,k
≥1为在第k个诱导时刻停车场j的泊位周转率,即某个单位时间段内停车场j内单个停车位被重复使用的次数;naj表示第j个停车场总的停车位总数,t≥0为动态分配周期。
22.进一步地,步骤s4中,静态场景下,对于单个待泊车辆i的停泊诱导成本ci建模为
23.进一步地,步骤s4中,静态场景下,停泊诱导总成本c建模为
24.进一步地,步骤s4中,动态场景下,对于第k个诱导时刻,单个待泊车辆i的停泊诱导成本d
i,k
建模为:
[0025][0026]
进一步地,步骤s4中,动态场景下,对于第k个诱导时刻,停泊诱导成本dk建模为
[0027]
进一步地,步骤s4中,动态场景下,停泊诱导成本d建模为,其中,k为总的动态分配时刻。
[0028]
进一步地,步骤s5中,静态场景下,停泊诱导问题模型建立为以停泊诱导总成本c最小为目标函数,同时,以和为约束,构造最优化问题,如公式(1):
[0029][0030]
进一步地,步骤s5中,动态场景下,停泊诱导问题模型建立为以停泊诱导总成本d最小为目标函数,以和为约束,构造最优化问题,如公式(2):
[0031][0032]
进一步地,步骤s6中,静态场景下,停泊诱导问题的适应度函数f设计为
其中,常数ε》0,设为0.01。
[0033]
进一步地,步骤s6中,动态场景下,停泊诱导问题的适应度函数f设计为其中,常数α》0,设为0.01。
[0034]
进一步地,步骤s7中,为克服传统蚁群算法收敛速度慢的问题,设计的自适应蚁群算法在每一步迭代完成后,求出最优解,并将该最优解保留。
[0035]
进一步地,步骤s7中,为克服传统蚁群算法“早熟”停滞的问题,设计的自适应蚁群算法将信息素蒸发系数按一定规律变化。变化规律是当算法求得的最优值在10次迭代循环内的差值小于0.1时,信息素蒸发系数γ计算方法如公式(3)所示。
[0036][0037]
其中,γz为当前迭代循环更新的信息素蒸发系数,γ
z-1
为上一迭代循环的信息素蒸发系数,γ
min
为信息素蒸发系数最小值,一般设置为0.1。
[0038]
与现有技术相比,本发明具有以下优点:
[0039]
(1)本发明建模方法,不仅考虑了客观和主观因素,还兼顾了静态和动态场景,能够形象的描述自主代客泊车停泊诱导问题。
[0040]
(2)本发明中的基于自适应蚁群算法的问题求解过程,能够实现并行快速的车路协同自主代客泊车停泊诱导。
[0041]
(3)本发明适用性强,能够同时适用于单智能车辆或者多智能车辆自主代客泊车停泊诱导控制,更加高效。
[0042]
(4)本发明能有效解决静态和动态场景下自主代客泊车的停车场调度和停车位分配的问题,降低因车辆反复寻泊导致的交通拥堵和能源浪费。
附图说明
[0043]
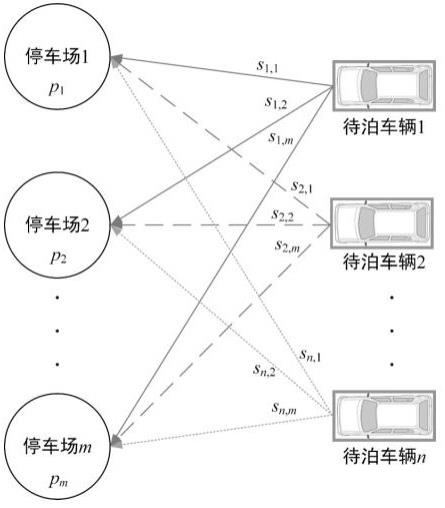
图1为本发明的车路协同自主代客泊车停泊诱导场景示意图。
[0044]
图2为本发明的车路协同自主代客泊车停泊诱导静态案例示意图。
[0045]
图3为本发明的车路协同自主代客泊车停泊诱导静态案例成本对比示意图。
[0046]
图4为本发明的自适应蚁群算法迭代收敛示意图。
具体实施方式
[0047]
下面结合附图和具体实施例对本发明进行详细说明。
[0048]
实施例:
[0049]
如图1所示,图1为本发明的车路协同自主代客泊车停泊诱导场景示意图,该策略具体步骤包括:
[0050]
步骤1:单个车辆停泊的客观成本建模。
[0051]
静态场景下,待泊车辆i诱导泊入停车场j的单个车辆停泊的客观成本g
i,j
建模为g
i,j
=(wfs
i,j
+pj)x
i,j
,其中,如图1所示,待泊车辆序号i=1,
…
,n,n为待泊车辆总数;停车场
序号j=1,
…
,m,m为停车场总数;wf为单位里程油耗折算的价格系数;s
i,j
为停泊行车里程,表示从放下用户目的地到目标停车场的停泊行车里程;pj为在停车场j的停泊费用;x
i,j
={0,1}是一个布尔量,为1表示车辆i停泊到停车场j,为0表示车辆i不停泊到停车场j。
[0052]
动态场景下,对于第k个诱导时刻,待泊车辆i诱导泊入停车场j的单个车辆停泊的客观成本g
i,j,k
建模为g
i,j,k
=(wfs
i,j,k
+pj)x
i,j,k
,其中,s
i,j
为第k个诱导时刻的停泊行车里程,表示从放下用户目的地到目标停车场的停泊行车里程;pj为在停车场j的停泊费用;x
i,j,k
={0,1}是一个布尔量,为1表示车辆i在第k个诱导时刻停泊到停车场j,为0表示车辆i在第k个诱导时刻不停泊到停车场j。
[0053]
步骤2:单个车辆停泊的主观成本建模。
[0054]
静态场景下,待泊车辆i停泊的主观成本hi建模为其中,w
s,i,j
为考虑停泊油耗的用户停泊意愿系数;w
p,j
为考虑停泊费用的用户停泊意愿系数;r≥0为待泊车辆i未分配到停车场导致原地等待的用户停泊意愿参数。考虑停泊油耗的用户停泊意愿系数w
s,i,j
设计为其中,cs≥0为当地居民消费水平对应的油耗心理承受系数,一般取为1;s
max
为居民可接受的最大停泊行车里程。考虑停泊费用的用户停泊意愿系数w
p,j
设计为建模为其中,c
p
≥0为当地居民消费水平对应的停泊费用心理承受系数,一般取为1;p
max
为居民可接受的最大停泊费用。
[0055]
动态场景下,对于第k个诱导时刻,待泊车辆i停泊的主观成本h
i,k
建模为其中,w
s,i,j,k
为考虑停泊油耗的用户停泊意愿系数;ρ》1为心理意愿增强系数,值越大,表明心理意愿越强大;k
i,0
为第i辆车首次进行停泊诱导的时刻。考虑停泊油耗的用户停泊意愿系数w
s,i,j,k
设计为
[0056]
步骤3:停泊诱导约束建模。
[0057]
静态场景下,由于1辆待泊车辆最多能占用1个停车位,有停泊诱导约束为由于1个停车位最多可以服务1辆待泊车辆,有停泊诱导约束为其中,nj表示第j个停车场的可用停车位总数。
[0058]
动态场景下,由于同一个诱导时刻k,1辆待泊车辆最多能占用1个停车位,有停泊诱导约束为由于同一个诱导时刻k,1个停车位最多可以服务1辆待泊车辆,有
停泊诱导约束为其中,uk为第k个诱导时刻内的待泊车辆总数;v
j,k
≥1为在第k个诱导时刻停车场j的泊位周转率,即某个单位时间段内停车场j内单个停车位被重复使用的次数;naj表示第j个停车场总的停车位总数,t≥0为动态分配周期。
[0059]
步骤4:停泊诱导总成本建模。
[0060]
静态场景下,对于单个待泊车辆i的停泊诱导成本ci建模为停泊诱导总成本c建模为
[0061]
动态场景下,对于第k个诱导时刻,单个待泊车辆i的停泊诱导成本d
i,k
建模为
[0062]
。停泊诱导成本dk建模为停泊诱导成本d建模为,其中,k为总的动态分配时刻。
[0063]
步骤5:停泊诱导问题模型的建立。
[0064]
静态场景下,停泊诱导问题模型建立为以停泊诱导总成本c最小为目标函数,以和为约束,构造最优化问题,如公式(1)所示。
[0065][0066]
动态场景下,停泊诱导问题模型建立为以停泊诱导总成本d最小为目标函数,以和为约束,构造最优化问题,最优化问题如公式(2)所示。
[0067][0068]
步骤6:适应度函数设计。
[0069]
静态场景下,停泊诱导问题的适应度函数fc设计为其中,常数ε》0,设为0.01。
[0070]
动态场景下,停泊诱导问题的适应度函数fd设计为其中,常数α》0,设为0.01。
[0071]
步骤7:自适应蚁群算法求解停泊诱导问题。为克服传统蚁群算法收敛速度慢的问题,设计的自适应蚁群算法在每一步迭代完成后,求出最优解,并将该最优解保留。为克服传统蚁群算法“早熟”停滞的问题,设计的自适应蚁群算法将信息素蒸发系数按一定规律变化。变化规律是当算法求得的最优值在10次迭代循环内的差值小于0.1时,信息素蒸发系数γ计算方法如公式(3)所示。
[0072][0073]
其中,γz为当前迭代循环更新的信息素蒸发系数,γ
z-1
为上一迭代循环的信息素蒸发系数,γ
min
为信息素蒸发系数最小值,一般设置为0.1。
[0074]
例如:如图2,描述的是一个停泊诱导的静态场景。场景中3个交通节点n1、n2、n3,分别有待泊车辆10辆、12辆和11辆;4个停车场的可用停车位总数n1、n2、n3、n4,均为6个;4个停车场的停泊费用p1、p2、p3、p4,均为2元;每个相邻节点间的距离、每个节点到相邻停车场的距离为si;其余关键参数wf=2/km,r=50,s
max
=1km,p
max
=2,cs=1.0,c
p
=1.0,γ
min
=0.1。如图3,将本发明的停泊诱导方法与就近停车的停泊诱导方法对比,数据表明,本发明的停泊诱导方法不论是在单车成本的均衡性上,还是在总成本最优性上,都要优于就近停车的停泊诱导方法。如图4,本发明的自适应蚁群算法在不到10个迭代次数就已经收敛到最优值,数据表明,本发明的自适应蚁群算法具有较好的收敛能力。
[0075]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1