一种基于互联网的智能管理系统的制作方法
1.本发明涉及智能管理技术领域,具体为一种基于互联网的智能管理系统。
背景技术:
2.智能网联汽车是一种跨技术、跨产业领域的新兴汽车体系。智能网联汽车是以车辆为主体和主要节点,融合现代通信和网络技术,使车辆与外部节点实现信息共享和协同控制,以达到车辆安全、有序、高效、节能行驶的新一代多车辆系统。
3.随着智能网联汽车技术的逐步发展,许多汽车厂商已将该技术应用到汽车的生产制造中。城市中行驶车辆数目较多、交通环境复杂多变,且汽车驾驶用户由于疲劳驾驶、行驶过程中拨打接听电话、其他行人不遵守交通规则等因素的影响,导致交通事故频发,对自身及他人的生命财产安全造成威胁的同时严重影响交通秩序;而智能网联汽车技术尚未完全成熟,在大多数危险情况下无法及时有效的运行而避免交通事故的发生。因此,设计维持交通秩序稳定及智能网联汽车技术有效运行的一种基于互联网的智能管理系统是很有必要的。
技术实现要素:
4.本发明的目的在于提供一种基于互联网的智能管理系统,以解决上述背景技术中提出的问题。
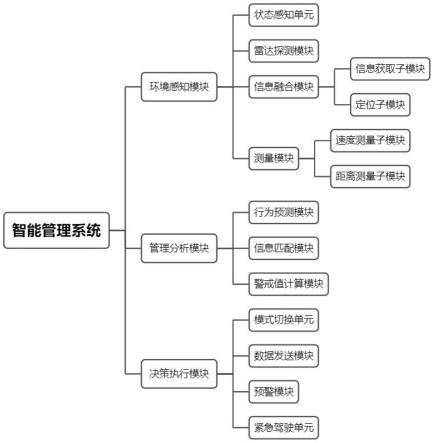
5.为了解决上述技术问题,本发明提供如下技术方案:一种基于互联网的智能管理系统,包括环境感知模块、管理分析模块与决策执行模块,所述环境感知模块与管理分析模块网络连接,所述管理分析模块与决策执行模块电连接,所述环境感知模块用于对行驶车辆的相关环境信息进行检查采集,所述管理分析模块用于对车辆驾驶控制信息进行管理分析,所述决策执行模块用于执行校正操作;
6.所述环境感知模块包括状态感知单元、雷达探测模块、信息融合模块与测量模块,所述状态感知单元与雷达探测模块电连接,所述雷达探测模块、信息融合模块网络连接,所述信息融合模块与测量模块网络连接,所述状态感知单元用于对车辆驾驶人员状态信息进行检测采集,所述雷达探测模块用于对车辆行驶道路的环境信息进行探测采集,所述信息融合模块用于对相关信息进行获取整理,所述信息融合模块包括信息获取子模块与定位子模块,所述信息获取子模块与定位子模块电连接,所述信息获取子模块用于对道路交通信息进行获取,所述定位子模块用于对车辆位置信息进行定位确定,所述测量模块用于对数据信息进行测量,所述速度测量子模块与距离测量子模块,所述速度测量子模块与距离测量子模块电连接,所述速度测量子模块用于对车辆行驶程度进行测量,所述距离测量子模块用于对车辆行驶距离进行测量。
7.根据上述技术方案,所述管理分析模块包括行为预测模块、信息匹配模块与警戒值计算模块,所述行为预测模块与信息匹配模块电连接,所述信息匹配模块与警戒值计算模块电连接,所述行为预测模块用于驾驶人员对车辆的操作行为进行分析预测,所述信息
匹配模块用于对信息数据进行匹配,所述警戒值计算模块用于对驾驶行为进行警戒值计算分析。
8.根据上述技术方案,所述决策执行模块包括模式切换单元、数据发送模块、预警模块与紧急驾驶单元,所述模式切换单元与数据发送模块电连接,所述数据发送模块与预警模块电连接,所述模式切换单元用于对驾驶模式进行切换,所述数据采集发送模块用于对数据信息进行发送,所述预警模块用于对车辆驾驶员进行预警通知,所述紧急驾驶单元用于对车辆紧急驾驶状况进行处理。
9.根据上述技术方案,所述智能管理系统的具体运行方法主要包括以下步骤:
10.步骤s1:驾驶员启动智能网联汽车向目的地行进;
11.步骤s2:系统在行程中对驾驶员信息及路途环境信息进行采集监测;
12.步骤s3:根据监测采集结果计算分析车辆行驶过程中危险驾驶警戒值;
13.步骤s4:进一步根据计算结果采取拯救措施并采集收集相关信息数据。
14.根据上述技术方案,所述步骤s2进一步包括以下步骤:
15.步骤s21:驾驶员启动汽车按导航路线开始行使上路后,状态感知模块对驾驶员的驾驶状态进行实时采集检测;
16.步骤s22:信息匹配模块将采集到的驾驶员状态数据与系统中已录入的正确驾驶标准数据进行匹配对比,当匹配对比值小于标准匹配阈值y时,对驾驶员不标准驾驶行为进行记录,并通过语音模块对驾驶员进行语音提醒,规范其错误驾驶行为;
17.步骤s23:在汽车行驶途中,定位子模块对汽车进行实时定位,确定车辆位置信息;
18.步骤s24:信息获取子模块通过网络信号获取导航路线中所包含的红绿灯位置信息并进行记录标注,并通过电信号启用雷达探测模块,雷达探测模块通过车辆安装的雷达装置对汽车前方五十米范围的道路状况信息进行实时检测记录。
19.根据上述技术方案,所述步骤s3进一步包括以下步骤:
20.步骤s31:在汽车行驶过程中,当雷达探测模块检测到前方道路五十米范围内有物体存在且与汽车间的距离逐渐缩短后,通过电信号启用行为预测模块;
21.步骤s32:行为预测模块预测分析此时驾驶员应控制汽车行驶速度随着与前方物体间距离的缩短而逐渐减缓,防止与前方物体发生碰撞,当驾驶员驾驶控制汽车与行为预测模块预测分析结果不同时,则通过电信号启用速度测量子模块与距离测量子模块;
22.步骤s33:速度测量子模块通过车载系统得到汽车此时的实时移动速度为v,距离测量子模块通过雷达探测模块测量得到汽车与前方物体间的实时距离为l;
23.步骤s34:警戒值计算模块通过电信号获取到上述距离与速度数据后,进一步计算分析得到车辆行驶警戒值j。
24.根据上述技术方案,所述步骤s34中车辆行驶警戒值j的计算公式如下:
25.j=kv+l-k
26.其中,j为车辆行驶警戒值,k为警戒值转换系数,v为车辆实时移动速度值、单位为m/s,l为汽车与前方物体间的实时距离值、单位为m。
27.根据上述技术方案,所述步骤s4进一步包括以下步骤:
28.步骤s41:预警模块通过电信号获取到计算结果车辆行驶警戒值j大于警戒阈值f时,则立即向驾驶员进行语音预警播报预警,在预警过程中车辆速度仍没有减缓时,则立即
通过电信号启用模式切换模块,模式切换模块控制汽车由人员驾驶模式转换为自动驾驶模式,自动控制汽车进行安全行驶;
29.步骤s42:在预警过程中,当车辆行驶警戒值j逐渐减小并小于警戒阈值f时,则不通过模式切换模块进行驾驶模式切换;
30.步骤s43:数据发送模块获取到汽车行驶过程中驾驶员不标准驾驶行为记录的结果后,通过网络信号将结果数据发送到交通管理培训门;
31.步骤s44:驾驶员在开始驾车行驶时按下紧急行驶按钮后,紧急驾驶单元通过网络信号向车辆所在地的交通管理部门发送求助信息帮助车辆向目的地行进。
32.与现有技术相比,本发明所达到的有益效果是:本发明,通过设置有环境感知模块、管理分析模块与决策执行模块,可规范驾驶员不安全驾驶行为,避免产生安全隐患;并可进一步处理行驶路况智能切换驾驶模式,减少交通事故的发生,同时将汽车行驶过程中驾驶员不标准驾驶行为记录的结果发送到交通管理培训门进行整理参考,有助于其完善对驾驶员的培训方法,间接维护了交通秩序的稳定;并可对紧急驾驶情况进行帮助,有效的减少了危险状况的发生。
附图说明
33.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
34.图1是本发明的系统模块组成示意图。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.请参阅图1,本发明提供技术方案:一种基于互联网的智能管理系统,包括环境感知模块、管理分析模块与决策执行模块,环境感知模块与管理分析模块网络连接,管理分析模块与决策执行模块电连接,环境感知模块用于对行驶车辆的相关环境信息进行检查采集,管理分析模块用于对车辆驾驶控制信息进行管理分析,决策执行模块用于执行校正操作;
37.环境感知模块包括状态感知单元、雷达探测模块、信息融合模块与测量模块,状态感知单元与雷达探测模块电连接,雷达探测模块、信息融合模块网络连接,信息融合模块与测量模块网络连接,状态感知单元用于对车辆驾驶人员状态信息进行检测采集,雷达探测模块用于对车辆行驶道路的环境信息进行探测采集,信息融合模块用于对相关信息进行获取整理,信息融合模块包括信息获取子模块与定位子模块,信息获取子模块与定位子模块电连接,信息获取子模块用于对道路交通信息进行获取,定位子模块用于对车辆位置信息进行定位确定,测量模块用于对数据信息进行测量,速度测量子模块与距离测量子模块,速度测量子模块与距离测量子模块电连接,速度测量子模块用于对车辆行驶程度进行测量,距离测量子模块用于对车辆行驶距离进行测量。
38.管理分析模块包括行为预测模块、信息匹配模块与警戒值计算模块,行为预测模块与信息匹配模块电连接,信息匹配模块与警戒值计算模块电连接,行为预测模块用于驾驶人员对车辆的操作行为进行分析预测,信息匹配模块用于对信息数据进行匹配,警戒值计算模块用于对驾驶行为进行警戒值计算分析。
39.决策执行模块包括模式切换单元、数据发送模块、预警模块与紧急驾驶单元,模式切换单元与数据发送模块电连接,数据发送模块与预警模块电连接,模式切换单元用于对驾驶模式进行切换,数据采集发送模块用于对数据信息进行发送,预警模块用于对车辆驾驶员进行预警通知,紧急驾驶单元用于对车辆紧急驾驶状况进行处理。
40.智能管理系统的具体运行方法主要包括以下步骤:
41.步骤s1:驾驶员启动智能网联汽车向目的地行进;
42.步骤s2:系统在行程中对驾驶员信息及路途环境信息进行采集监测;
43.步骤s3:根据监测采集结果计算分析车辆行驶过程中危险驾驶警戒值;
44.步骤s4:进一步根据计算结果采取拯救措施并采集收集相关信息数据。
45.步骤s2进一步包括以下步骤:
46.步骤s21:驾驶员启动汽车按导航路线开始行使上路后,状态感知模块对驾驶员的驾驶状态进行实时采集检测;
47.步骤s22:信息匹配模块将采集到的驾驶员状态数据与系统中已录入的正确驾驶标准数据进行匹配对比,当匹配对比值小于标准匹配阈值y时,对驾驶员不标准驾驶行为进行记录,并通过语音模块对驾驶员进行语音提醒,规范其错误驾驶行为;驾驶员在驾驶车辆过程中可能发生未系安全带、单手握方向盘、未直视车辆前方道路等不规范的驾驶行为,这导致与系统中标准驾驶车辆规范不匹配,故对其进行提醒规范,避免产生安全隐患;
48.步骤s23:在汽车行驶途中,定位子模块对汽车进行实时定位,确定车辆位置信息;
49.步骤s24:信息获取子模块通过网络信号获取导航路线中所包含的红绿灯位置信息并进行记录标注,并通过电信号启用雷达探测模块,雷达探测模块通过车辆安装的雷达装置对汽车前方五十米范围的道路状况信息进行实时检测记录。
50.步骤s3进一步包括以下步骤:
51.步骤s31:在汽车行驶过程中,当雷达探测模块检测到前方道路五十米范围内有物体存在且与汽车间的距离逐渐缩短后,通过电信号启用行为预测模块;
52.步骤s32:行为预测模块预测分析此时驾驶员应控制汽车行驶速度随着与前方物体间距离的缩短而逐渐减缓,防止与前方物体发生碰撞,当驾驶员驾驶控制汽车与行为预测模块预测分析结果不同时,则通过电信号启用速度测量子模块与距离测量子模块;
53.步骤s33:速度测量子模块通过车载系统得到汽车此时的实时移动速度为v,距离测量子模块通过雷达探测模块测量得到汽车与前方物体间的实时距离为l;
54.步骤s34:警戒值计算模块通过电信号获取到上述距离与速度数据后,进一步计算分析得到车辆行驶警戒值j。
55.步骤s34中车辆行驶警戒值j的计算公式如下:
56.j=kv+l-k
57.其中,j为车辆行驶警戒值,k为警戒值转换系数,v为车辆实时移动速度值、单位为m/s,l为汽车与前方物体间的实时距离值、单位为m;由公式可知,随着车辆实时移动速度值
越大、与前方物体间的实时距离值越小,车辆行驶警戒值也越大,表明发生危险的概率越高。
58.步骤s4进一步包括以下步骤:
59.步骤s41:预警模块通过电信号获取到计算结果车辆行驶警戒值j大于警戒阈值f时,则立即向驾驶员进行语音预警播报预警,在预警过程中车辆速度仍没有减缓时,则立即通过电信号启用模式切换模块,模式切换模块控制汽车由人员驾驶模式转换为自动驾驶模式,自动控制汽车进行安全行驶;在车辆行驶警戒值j大于警戒阈值f且进行语音预警播报预警时,驾驶员仍没有控制车辆进行减速,说明驾驶员行车状态不集中,可能由于其他因素干扰使其分心不认真驾驶车辆,故切换自动驾驶模式来控制汽车行驶,可避免与道路前方的物体发生碰撞,减少交通事故的发生;
60.步骤s42:在预警过程中,当车辆行驶警戒值j逐渐减小并小于警戒阈值f时,则不通过模式切换模块进行驾驶模式切换;在预警过程中车辆行驶警戒值j逐渐减小,表明驾驶员听到预警后集中精神驾驶车辆或前方物体开始移动(或加速移动)等因素影响使车辆行驶警戒值j逐渐减小,故不需切换自动驾驶模式;
61.步骤s43:数据发送模块获取到汽车行驶过程中驾驶员不标准驾驶行为记录的结果后,通过网络信号将结果数据发送到交通管理培训门;将汽车行驶过程中驾驶员不标准驾驶行为记录的结果发送到交通管理培训门进行整理参考,有助于其完善对驾驶员的培训方法,间接维护了交通秩序的稳定;
62.步骤s44:驾驶员在开始驾车行驶时可按下紧急行驶按钮后,紧急驾驶单元通过网络信号向车辆所在地的交通管理部门发送求助信息帮助车辆向目的地行进。当驾驶员按下紧急行驶按钮后,表明驾驶员遇到紧急状况与快速向目的地行进,如车辆上载有病人急需快速送到医院救治等;当交通管理部门接收到求助信息后,可迅速通知交警人员对车辆进行帮助,如为其开路指挥其他车辆避让等行为,帮助其快速行驶到目的地。
63.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
64.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1