高速公路上车辆路径规划方法与流程
1.本发明涉及高速公路上车辆的路径规划领域,特别涉及一种高速公路上车辆路径规划方法。
背景技术:
2.目前,随着我国高速公路建设的飞速发展,以及人们越来越多的高速出行需求,导致高速公路的拥堵不可避免,为此,虽然有相关部门的政策疏导,但是不能及时解决高速道路上车辆顺畅行驶的问题。
3.因此,很多对于高速公路的拥堵路段的疏导方案应运而生,例如,参见申请号为cn201810416528.5的专利申请,其公开了一种高速公路交通拥堵疏导决策方法,然而,该专利申请主要是以在od(出行起始点)需求交通量完成分配后进一步考虑交通流量动态疏散的因素,使得分配结果与实际更加相符,所预测出的交通流量可以体现出更强的实时性,为重大节假日高速公路交通拥堵疏导提供科学有效的决策方案。
4.基于该专利申请的公开的技术方案,虽然能从一定程度上对高速公路上的拥堵车辆进行疏导,然而其依赖于神经网络的训练,且训练的相关参数并未涉及拥堵路段发生原因和实时情况,因此,高速公路的拥堵路段的车辆疏导实时性也有待提高。
技术实现要素:
5.本发明的目的是提供一种高速公路上车辆路径规划方法,能够根据拥堵路段的实时数据及时对拥堵路段的车辆进行路径规划,及时消除高速公路的道路拥堵情况。
6.本发明解决其技术问题,采用的技术方案是:
7.高速公路上车辆路径规划方法,包括:
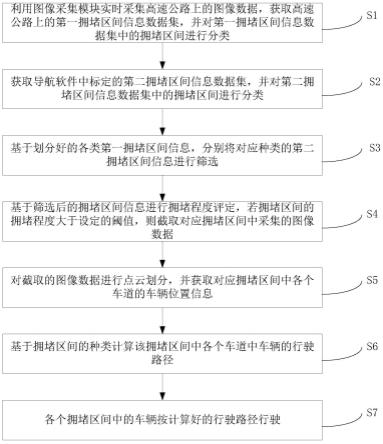
8.利用图像采集模块实时采集高速公路上的图像数据,获取高速公路上的第一拥堵区间信息数据集,并对第一拥堵区间信息数据集中的拥堵区间进行分类;
9.获取导航软件中标定的第二拥堵区间信息数据集,并对第二拥堵区间信息数据集中的拥堵区间进行分类;
10.基于划分好的各类第一拥堵区间信息,分别将对应种类的第二拥堵区间信息进行筛选;
11.基于筛选后的拥堵区间信息进行拥堵程度评定,若拥堵区间的拥堵程度大于设定的阈值,则截取对应拥堵区间中采集的图像数据;
12.对截取的图像数据进行点云划分,并获取对应拥堵区间中各个车道的车辆位置信息;
13.基于拥堵区间的种类计算该拥堵区间中各个车道中车辆的行驶路径;
14.各个拥堵区间中的车辆按计算好的行驶路径行驶。
15.进一步的是,所述图像采集模块为无人机和/或设置在高速公路两侧的高位摄像头。
16.进一步的是,所述对第一拥堵区间信息数据集中的拥堵区间进行分类,具体是指:
17.将所述第一拥堵区间信息数据集中的拥堵区间划分为自然灾害导致的第一拥堵区间、人为车祸导致的第一拥堵区间和驾驶习惯不当导致的第一拥堵区间。
18.进一步的是,所述获取导航软件中标定的第二拥堵区间信息数据集时,具体包括:
19.基于厂家类型对导航软件进行分类;
20.对每类导航软件中标定的同一第二拥堵区间进行对齐处理;
21.将对齐后的第二拥堵区间对应的拥堵区间信息作为标定的第二拥堵区间信息。
22.进一步的是,所述对第二拥堵区间信息数据集中的拥堵区间进行分类,具体是指:
23.将各类第一拥堵区间与对应种类的第二拥堵区间进行统一。
24.进一步的是,所述基于划分好的各类第一拥堵区间信息,分别将对应种类的第二拥堵区间信息进行筛选,具体是指:若与第一拥堵区间对应的第二拥堵区间未在导航软件中标定,则对相应的第二拥堵区间进行标定,并将标定后的第二拥堵区间对应的拥堵区间信息添加至第二拥堵区间信息数据集。
25.进一步的是,所述基于筛选后的拥堵区间信息进行拥堵程度评定,若拥堵区间的拥堵程度小于设定的阈值,则基于该拥堵区间的种类在导航软件中对相关车辆进行提示。
26.进一步的是,所述对截取的图像数据进行点云划分,并获取对应拥堵区间中各个车道的车辆位置信息,具体为:
27.基于截取的图像数据判断对应拥堵区间中车辆的分布位置信息;
28.基于导航软件获取对应拥堵区间中各个车道的车辆位置信息;
29.基于分布位置信息和各个车辆的位置信息筛选出未在规定道路中的车辆。
30.进一步的是,当筛选出未在规定道路中的车辆时,判断该车辆是否正在正常变道,若是,则将该车辆作为拥堵区间中正常行驶的车辆,否则提示该车辆归入对应车道。
31.进一步的是,所述基于拥堵区间的种类计算该拥堵区间中各个车道中车辆的行驶路径,具体是指:
32.基于拥堵区间的种类判断出拥堵发生位置;
33.判断车辆所在位置距拥堵发生位置的距离是否在预设距离范围内,若在,且当车辆与拥堵发生位置的车辆同属同一车道或临近车道时,则提示该车辆进行临近变道,若不在,则提示对应车辆进行连续变道。
34.本发明的有益效果是:通过上述高速公路上车辆路径规划方法,首先,利用图像采集模块实时采集高速公路上的图像数据,获取高速公路上的第一拥堵区间信息数据集,并对第一拥堵区间信息数据集中的拥堵区间进行分类,这样,以高速公路上的车辆实时数据为依据,可以为后续数据处理争取时间,并且,更能及时地反应道路拥堵情况及拥堵原因;然后,获取导航软件中标定的第二拥堵区间信息数据集,并对第二拥堵区间信息数据集中的拥堵区间进行分类,一般高速公路上行驶的车辆都会使用到导航软件,导航软件很多情况下也会分析拥堵原因,并且能够对不用种类的拥堵情况进行提醒;然后,基于划分好的各类第一拥堵区间信息,分别将对应种类的第二拥堵区间信息进行筛选,这样,能够最大程度确认拥堵类型,也能保证拥堵信息的准确性;然后,基于筛选后的拥堵区间信息进行拥堵程度评定,若拥堵区间的拥堵程度大于设定的阈值,则截取对应拥堵区间中采集的图像数据,这里,只对需要进行疏导的车辆进行路径规划和疏导;然后,对截取的图像数据进行点云划
分,并获取对应拥堵区间中各个车道的车辆位置信息,这里,是为了更准确地判断拥堵路段的发生位置和拥堵原因;最后,基于拥堵区间的种类计算该拥堵区间中各个车道中车辆的行驶路径,各个拥堵区间中的车辆按计算好的行驶路径行驶。
附图说明
35.图1为本发明实施例提供的高速公路上车辆路径规划方法的流程图。
具体实施方式
36.下面结合附图及实施例,详细描述本发明的技术方案。
37.实施例
38.本发明实施例提供一种高速公路上车辆路径规划方法,其流程图见图1,其中,该方法包括如下步骤:
39.s1.利用图像采集模块实时采集高速公路上的图像数据,获取高速公路上的第一拥堵区间信息数据集,并对第一拥堵区间信息数据集中的拥堵区间进行分类。
40.需要指出的是,为了能够实现图像采集目的,且不增加额外的图像采集成本,本实施例中提到的图像采集模块可以为无人机和/或设置在高速公路两侧的高位摄像头,当然,为了更准确地识别高速公路上的车辆图像数据信息,还可以使用其他图像采集装置进行高速公路上图像数据的采集。
41.这里,对第一拥堵区间信息数据集中的拥堵区间进行分类,具体是指:
42.将所述第一拥堵区间信息数据集中的拥堵区间划分为自然灾害导致的第一拥堵区间、人为车祸导致的第一拥堵区间和驾驶习惯不当导致的第一拥堵区间。
43.一般来说,高速公路拥堵的原因有很多,比如自然灾害导致的拥堵,人为车祸导致的拥堵,某些驾驶员驾驶习惯不当导致的拥堵,当然,也存在高速公路的道路施工造成占用车道导致的拥堵,本实施例中并不限定导致道路拥堵的因素,这里,侧重的是先划分出第一拥堵区间道路拥挤的种类,以便后续对道路拥堵的车辆按拥堵种类分别进行对应的路径规划,更及时地解决拥堵问题。
44.s2.获取导航软件中标定的第二拥堵区间信息数据集,并对第二拥堵区间信息数据集中的拥堵区间进行分类。
45.这里,获取导航软件中标定的第二拥堵区间信息数据集时,具体包括:
46.基于厂家类型对导航软件进行分类;
47.对每类导航软件中标定的同一第二拥堵区间进行对齐处理;
48.将对齐后的第二拥堵区间对应的拥堵区间信息作为标定的第二拥堵区间信息。
49.其中,由于高速公路上行驶的车辆种类不一,所用到的导航软件对应的厂家也可能不同,所以首先按导航软件的厂家对导航软件进行分类,能够更快分析出道路拥堵的原因,也能排除一部分拥堵的误报。一般来说,目前的导航软件都会对高速道路拥堵的路段长度进行标定,而不同厂家的导航软件对于拥堵路段的标定可能不完全相同,为了更好地判断出需要疏导的拥堵路段,因此,需要对拥堵区间进行对齐,保证后路径规划的准确性。也就是说,这里提到的对第二拥堵区间信息数据集中的拥堵区间进行分类,具体是指:将各类第一拥堵区间与对应种类的第二拥堵区间进行统一。
50.s3.基于划分好的各类第一拥堵区间信息,分别将对应种类的第二拥堵区间信息进行筛选。
51.这里,所述基于划分好的各类第一拥堵区间信息,分别将对应种类的第二拥堵区间信息进行筛选,具体是指:若与第一拥堵区间对应的第二拥堵区间未在导航软件中标定,则对相应的第二拥堵区间进行标定,并将标定后的第二拥堵区间对应的拥堵区间信息添加至第二拥堵区间信息数据集。
52.其中,有些车辆司机即使在高速公路上行驶也不会的打开导航软件,这些司机由于驾驶经验,可能对某些高速公路的路段非常熟悉,这种情况下,若这类司机所驾驶车辆出现在拥堵路段,也需要打开导航软件,并会利用导航软件对拥堵路段进行标定,那么,就需要将标定后的第二拥堵区间对应的拥堵区间信息添加至第二拥堵区间信息数据集,以便接收后续规划的路径,并即时驶出拥堵路段。
53.s4.基于筛选后的拥堵区间信息进行拥堵程度评定,若拥堵区间的拥堵程度大于设定的阈值,则截取对应拥堵区间中采集的图像数据。
54.这里,考虑的路径规划方法的整体数据处理效率,只对需要进行疏导的车辆进行路径规划和疏导,因此,基于筛选后的拥堵区间信息进行拥堵程度评定,若拥堵区间的拥堵程度小于设定的阈值,则基于该拥堵区间的种类在导航软件中对相关车辆进行提示。
55.s5.对截取的图像数据进行点云划分,并获取对应拥堵区间中各个车道的车辆位置信息。
56.这里,为了了解拥堵路段中每个车道的车辆行驶情况,并基于每个车道中车辆的位置为不同的车辆规划不同的行驶路径,所以,所述对截取的图像数据进行点云划分,并获取对应拥堵区间中各个车道的车辆位置信息,具体可以为:
57.基于截取的图像数据判断对应拥堵区间中车辆的分布位置信息;
58.基于导航软件获取对应拥堵区间中各个车道的车辆位置信息;
59.基于分布位置信息和各个车辆的位置信息筛选出未在规定道路中的车辆。
60.实际应用过程中,当筛选出未在规定道路中的车辆时,判断该车辆是否正在正常变道,若是,则将该车辆作为拥堵区间中正常行驶的车辆,否则提示该车辆归入对应车道,以便针对不同车道,再根据每个车道中车辆的位置进行精准地路径规划。
61.s6.基于拥堵区间的种类计算该拥堵区间中各个车道中车辆的行驶路径。
62.这里,在进行路径规划时,需要考虑拥堵发生位置,一般来说,如果车辆距离拥堵发生位置越近,则需要这些车辆尽快变道,为距离较远的车辆和其他车道的车辆尽快腾出空间,避免二次拥堵,因此,本实施例中,所述基于拥堵区间的种类计算该拥堵区间中各个车道中车辆的行驶路径,具体是指:
63.基于拥堵区间的种类判断出拥堵发生位置;
64.判断车辆所在位置距拥堵发生位置的距离是否在预设距离范围内,若在,且当车辆与拥堵发生位置的车辆同属同一车道或临近车道时,则提示该车辆进行临近变道,若不在,则提示对应车辆进行连续变道。
65.s7.各个拥堵区间中的车辆按计算好的行驶路径行驶。
66.这里,已经将不同的拥堵路段精准计算完毕,也实现了每种拥堵路段中车辆的路径规划,因此,各个拥堵路段中的车辆会因所在位置以及当前拥堵路段的实时情况实时接
收到不同的规划路径,能够最大限度地消除道路拥堵情况。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1