智能安防系统及机器狗的制作方法
1.本发明涉及安防监控领域,尤其涉及一种智能安防系统及机器狗。
背景技术:
2.随着社会的发展和人民生活水平的提高,健康稳定的发展和生活越来越成为社会发展的主旋律,越来越多的企业和家庭开始关注企业生产和家庭居住环境的安全性。越来越多的安防设备产品被运用到社会生产和生活的情景当中。常见的安防设备包括监控摄像系统,烟雾报警器,电子防盗锁等等。
3.常见的一些安防设备,都存在几个常见的问题。
4.1、功能单一,常见的影像安防设备,例如监控摄像头,一般只设计影像监控功能,由于是固定安装,因此监控的范围十分有限,无法做到灵活覆盖更大的空间。
5.2、巡逻机器人,目前使用的先进巡逻机器人,可以自动行驶和人脸识别,需要依靠移动网络,这种一般适用工厂园区,可以针对特定人群进行监测,但是不具备家庭陌生人入侵预警和报警功能,同时无法断开网络离线使用。
6.3、传统的安防设备,都需要进行设置,例如监控摄像头,需要固定安装,配置网络,对于一般人群需要一定的动手能力,因此安装设置复杂。
7.4、价格昂贵,巡逻机器人设备,目前被应用予工业园区巡视,导航以及智能引导等功能,此设备价格昂贵,不适用家庭使用。
技术实现要素:
8.鉴于以上技术问题,本发明提供了一种智能安防系统及机器狗,以解决上述提及的几点问题。
9.本公开的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本公开的实践而习得。
10.根据本发明的一方面,公开一种智能安防系统,所述系统包括主控模块,以及分别与所述主控模块连接的红外监控模块、离线语音识别模块、第一加速度传感模块、具有至少两个第一步进电机的电机模块,所述电机模块安装在执行主体的行进轮上,用于驱动所述行进轮转动,其中:所述红外监控模块用于根据检测范围内的人体移动或高温物体,在检测到存在人体移动或高温物体时,产生高温红外数据至所述主控模块,以使得所述主控模块控制所述离线语音识别模块的扬声器单元发出警示音;所述离线语音识别模块用于将其内置的麦克风单元接收到的语音数据与内置的语音指令集合进行匹配,在匹配成功后发送第一操作指令至所述主控模块,以使得所述主控模块根据所述第一操作指令控制所述电机模块工作或/和控制所述扬声器单元工作;所述主控模块还用于根据预设的轨迹数据及所述第一加速度传感器实时反馈的第一加速度数据来控制至少两个所述第一步进电机的各自转动速度和转动时间,以使得所述系统绕所述轨迹数据代表的线路移动。
11.进一步的,所述红外监控模块还用于产生影像数据并传输至所述主控模块,所述
主控模块将所述影像数据传输至存储模块,所述存储模块与所述主控模块为热拔插连接的。
12.进一步的,所述主控模块通过无线蓝牙与智能设备连接,所述智能设备具有第二加速度传感模块,在所述智能设备移动时,所述主控模块根据所述第一加速度传感模块产生第一加速度数据和所述第二加速度传感模块产生的第二加速度数据来控制至少两个所述第一步进电机的各自转动速度,以使得所述系统跟随所述智能设备移动。
13.进一步的,所述智能设备还用于在与所述主控模块无线蓝牙连接时,传输所述轨迹数据至所述主控模块;以及发送第二操作指令至与所述主控模块,以使得所述主控模块根据所述第二操作指令来控制所述电机模块工作或/和控制所述扬声器单元工作。
14.进一步的,所述主控模块为具有蓝牙功能的主控芯片。
15.进一步的,所述系统还包括按键模块,所述按键模块用于被按动后发生第三操作指令至所述主控模块,以使得所述主控模块根据所述第三操作指令来控制所述电机模块工作或/和控制所述扬声器单元工作。
16.进一步的,所述电机模块还包括驱动单元,所述驱动单元分别与所述主控模块和至少两个所述第一步进电机连接,所述驱动单元用于在所述主控模块的控制下,通过改变输入至所述第一步进电机的电流大小和电流输入端口而改变所述第一步进电机的正向转动速度或负向转动速度。
17.进一步的,所述系统还包括电源模块,所述电源模块包括管理单元、电池单元,所述电池单元用于通过所述管理单元为所述主控模块、所述红外监控模块、所述离线语音识别模块、所述第一加速度传感模块和所述电机模块供电。
18.根据本发明的另一方面,公开一种智能安防机器狗,包括如上所述的系统,所述机器狗的外观呈仿生狗形状,包括机身、至少两个行进轮、头部,至少两个所述第一步进电机分别设置在至少两个所述行进轮中,所述红外监控模块设置于所述头部,所述第一加速度传感模块设置于所述机身中,所述按键模块设置于所述机身或头部。
19.进一步的,所述头部通过第二步进电机可在预设角度范围内转动地设置于所述机身上,在所述红外监控模块检测到存在人体移动或高温物体时,所述主控模块实时控制所述第二步进电机停止转动,以使得所述红外监控模块持续监控人体移动或高温物体。
20.本公开的技术方案具有以下有益效果:
21.1、本公开包含红外监控模块,该模块可以即时监测是否有人体移动,由于在黑夜的情景下,可以准确地探测人体移动,并通过扬声器单元作出警示,提醒安保人员。
22.2、通过设置离线语音识别模块,可通过简单的语音指令来控制主控模块。
23.3、红外监控模块可以监测高温物体,因此在监控过程中可以针对火警情况进行预警。
24.4、配合设定的轨迹数据和第一加速度传感模块,使得本公开可以沿着特定区域循环巡逻,大大拓宽了监控范围,提高了监控威慑力,以及相对应传统的多摄像头布置和联网设置的监控系统,本公开大大减少了设备成本。
附图说明
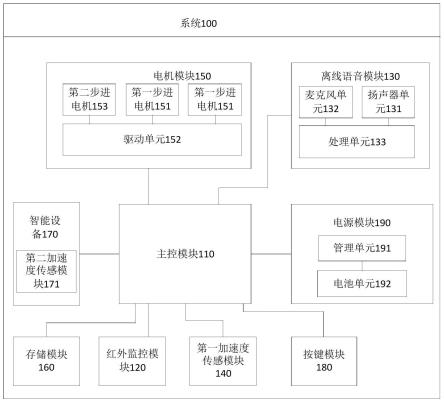
25.图1为本说明书实施例中智能安防系统的结构示意图;
26.图2为本说明书实施例中主控模块的电路原理图;
27.图3为本说明书实施例中第一加速度传感模块的电路原理图;
28.图4为本说明书实施例中红外监控模块的电路原理图;
29.图5为本说明书实施例中处理单元的电路原理图;
30.图6为本说明书实施例中麦克风单元的电路原理图;
31.图7为本说明书实施例中扬声器单元的电路原理图;
32.图8为本说明书实施例中电机模块的电路原理图;
33.图9为本说明书实施例中智能安防机器狗的结构示意图。
34.其中,附图标记:100、系统;110、主控模块;120、红外监控模块;130、离线语音识别模块;131、扬声器单元;132、麦克风单元;133、处理单元;140、第一加速度传感器;150、电机模块;151、第一步进电机;152、驱动单元;153、第二步进电机; 160、存储模块;170、智能设备;171、第二加速度传感模块;180、按键模块;190、电源模块;191、管理单元;192、电池单元;200、机器狗;210、车身;220、行进轮; 230、头部;240、眼部;250、尾部。
具体实施方式
35.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.为了提供一个通俗易懂的智能安防系统框架,在下列系统以及机器狗描述中涉及了许多具体的细节,例如设计、部件、机器狗结构等的具体实例。然而,本专利所保护的权益包括但不限于文中所述具体实例,任何可以被部署或替换以实现此技术路线的具体实例均应受到保护。
37.本公开中所使用的术语“转动速度”可以是正数,也可以是负数,即设定行进轮朝向某一方形转动为正向,转动速度为正数,当行进轮朝相反方向转动时,则转动速度为负数。
38.如图1所示,本说明书实施例提供一种智能安防系统,系统100包括主控模块110,以及分别与主控模块110连接的红外监控模块120、离线语音识别模块130、第一加速度传感模块140、具有至少两个第一步进电机151的电机模块150,电机模块150安装在执行主体的行进轮上,用于驱动行进轮转动,其中:红外监控模块120用于根据检测范围内的人体移动或高温物体,在检测到存在人体移动或高温物体时,产生高温红外数据至主控模块110,以使得主控模块110控制离线语音识别模块130的扬声器单元131 发出警示音;离线语音识别模块130用于将其内置的麦克风单元132接收到的语音数据与内置的语音指令集合进行匹配,在匹配成功后发送第一操作指令至主控模块110,以使得主控模块110根据第一操作指令控制电机模块150工作或/和控制扬声器单元131 工作;主控模块110还用于根据预设的轨迹数据及第一加速度传感器实时反馈的第一加速度数据来控制至少两个第一步进电机151的各自转动速度和转动时间,以使得系统 100绕轨迹数据代表的线路移动。
39.其中,如图2至图8所示,主控模块110可以采用具有数据处理能力的主控芯片,第一加速度传感模块140可以包括加速度传感器芯片,红外监控模块120可以包括红外热成像模组,离线语音识别模块130包括可实现离线语音识别功能的处理芯片,电机模块150包括
多个驱动芯片和多个步进电机,由不同驱动芯片来实现对不同的步进电机的转速控制,以上均可以选取现有技术中成熟的硬件。
40.图2展示了一种主控芯片u9的电路原理图,其中主控芯片u9采用nrf52832芯片, qfn48封装,该主控芯片除了具备蓝牙连接的功能,还具备对数据处理的能力。主控芯片u9可使用蓝牙ble协议,则主控芯片u9在本实施例中可与其他蓝牙设备进行稳定的蓝牙连接。另外,为了提高连接的稳定性,主控芯片u9外围搭配16mhz晶振芯片y1,提供稳定的晶振频率,满足芯片的稳定运行要求。
41.图3展示了一种加速度传感器芯片的电路原理图,第一加速度传感模块140的加速度传感器可以采用型号为mpu6881的加速度传感器芯片u8。其中该芯片的vdd_3v3管脚为芯片的供电管脚,i2c_scl1和i2c_sda1为传感器芯片的i2c接口,改接口与主控芯片 u9进行连接。
42.系统100在移动时,加速度传感器芯片u8在x轴,y轴,z轴存在不同的加速度。通过x、y、z轴的实际加速度(第一加速度数据)可以准确地计算出当前位置相对于原始位置的位移量。主控芯片u9可提供双路i2c接口用于和外围的模块进行数字通信,其中i2c接口包括i2c_scl1和i2c2_sda1两个管脚,分别用于i2c硬件接口的时钟管脚和数据传输管脚。i2c接口用于nrf52832主控芯片u9和加速度传感器芯片u8的连接。加速度传感器芯片u8动态采集x轴、y轴和z轴的第一加速度数据,并且通过i2c1接口传输到主控芯片u9。而主控芯片通过实时对位移量的计算,则可以实现系统100绕指定区域移动。即,轨迹数据代表的线路,可以理解为:设定系统100需要前进的距离和转弯的角度,如前进10米后右转90
°
,依次重复四次便形成一个正方形的封闭路线,行驶的过程由两个步进电机的转速所决定,而最终是通过主控芯片控制输入到不同的步进电机的电流强弱所决定。而加速度传感器芯片所起到的作用,可以理解为,一方面,用于对系统100执行绕线路移动时的初始位置和角度的校准,另一方面,在行驶的过程,实时统计位移量,而主控芯片根据位移量,及时修正对步进电机的控制。
43.图4展示一种红外监控模块120的电路原理图,包括红外热成像仪j2,红外热成像仪j2通过spi接口以及i2c接口与主控芯片进行连接,用于传输影像数据和高温红外数据,并采用vdd_5v供电。
44.图5-7展示了一种离线语音识别模块130的电路原理图,其中,离线语音识别模块 130可以包括处理单元133、麦克风单元132、扬声器单元131,处理单元133用于对语音数据进行匹配,麦克风单元132用于采集语音数据,扬声器单元131用于播读由主控模块110预设的警示音,处理单元133可以包括型号为ci1122的处理芯片u5,该处理芯片u5可以实现离线语音识别功能,实现对语音数据的匹配,图5展示了处理芯片u5 及外围电路,图6展示了麦克风单元132162的电路,通过阅读图5及图6,可以得知,处理芯片u5的uart1_tx和uart1_rx为串口管脚,该接口与上述主控芯片u9通过串口进行连接通信。vdd_3v3和vdd1v2分别需要输入3.3v供电电压和1.2v供电电压,由供电电源部分提供。处理芯片u5提供单模拟mic输入做为音频输入接口,其中mcp_l和 mcp_r为差分输入脚,micbias为麦克风的供电使能脚。图7为离线语音识别模块130 的扬声器单元131,采用fm8002芯片做为核心芯片。其中hpout_l为处理芯片u5的模拟音频输入脚,接入-in脚,该脚用于模拟音频输入,与+in构成差分输入管脚。shut 管脚为使能管脚,与处理芯片u5的gpio26进行连接,通过软件控制功放芯片
的加速度传感器芯片u8的y轴为系统100的直行前进方向,x轴为系统100的左右摆动方向,z轴为上下移动的数据,而z轴的数据在平整的地面上移动时一般可以忽略。手机的加速度传感器同样设置。由于手机为使用者持有的,即手机与系统100是分离的,系统100需要实现跟随着使用者移动,手机在移动时,其加速度传感器的x轴、y轴、z 轴会发生变化,此第二加速度数据被控制app采集到,控制app便将第一加速度数据和第二加速度数据进行解析,得到各自的位移量,将位移量与初始位置进行判断,即可得系统100相对于手机的位置数据和距离数据。在设定手机与系统100的距离保持在预设距离时,手机便可以通过主控芯片u9改变第一步进电机151的转动速度,如距离过远时,加快第一步进电机151的转速,过近时,减缓第一步进电机151的转速。另外,在看护者拐弯或掉头时,手机的第二加速度数据会发生变化,尤其是代表着左右方向的x 轴数据,手机将x轴数据实时解析后,便可以控制两个第一步进电机151141中的一个减速,另一保持不变或加速,便可以实现转弯。
52.另外,值得解释的是,初始位置或原始位置是可以修改的,即通过手机的传感器芯片与系统100的加速度传感器芯片u8进行角度校准和输入初始距离,便可以设定初始位置。通过角度校准,可以得到手机相对应系统100的正前方的角度,看护者粗略计算下两者之间的初始距离,输入到手机中。初始位置设定后,手机应固定放置于看护者的口袋或者胸口等固定位置。
53.另外,第一加速度数据和第二加速度数据在手机端中进行解析,可以充分利用现有的智能手机的高性能处理器。但不应局限与此,还可以是,在随行过程中,手机端不断读取手机内置传感器的x轴,y轴和z轴的传感器数据,并且通过ble协议实时传输到主控芯片u9,主控芯片u9也实时读取加速度传感器的x轴,y轴和z轴的实时数据并且进行计算,通过一定的解析算法给出解析结果并且控制第一步进电机151进行输出。在主控芯片u9中计算,可以提高反应速度,避免数据在ble中来回传输造成的延迟响应。
54.同时,第一加速度数据和第二加速度数据无论是手机端还是主控芯片u9中解析,其采用的解析算法可以是现有技术中的任一种,只要其能分析出相对应初始位置的位移量即可。
55.通过系统100跟随着使用者移动的这一技术方案,可以在漆黑的夜晚,帮助使用者找出隐藏在黑暗中的潜入者,以弥补人类肉眼的不足,另外,本技术方案在玩具领域应用时,还可以增强玩具的趣味性。为了避免红外监控模块120误检测到使用者而造成的误报警,在执行随行功能时,红外监控模块120的检测端应背对着使用者。
56.作为补充的,智能设备170还用于在与主控模块110无线蓝牙连接时,传输轨迹数据至主控模块110;以及发送第二操作指令至与主控模块110,以使得主控模块110根据第二操作指令来控制电机模块150工作或/和控制扬声器单元131工作。
57.其中,该轨迹数据是由手机设定的,即使用者在手机上操作,设定系统100的行驶路线后发送至主控模块110,主控模块110将新的行驶路线替换旧的行驶路线。手机发送的第二操作指令,其可以包括与语音指令类似的功能,如停止扬声器单元131发出警报,停止第一步进电机151转动,关闭红外监控模块120等等。
58.在一实施例中,系统100还包括按键模块180,按键模块180用于被按动后发生第三操作指令至主控模块110,以使得主控模块110根据第三操作指令来控制电机模块150 工作或/和控制扬声器单元131工作。同理,由语音指令和手机发送第二操作来实现的功能,同时
也可以通过按键模块180来实现,适用于在无手机连接及周围噪音太大的场景实用。
59.在一实施例中,系统100还包括电源模块190,电源模块190包括管理单元191、电池单元192,电池单元192用于通过管理单元191为主控模块110、红外监控模块120、离线语音识别模块130、第一加速度传感模块140和电机模块150供电。
60.基于上述的系统100的各个实施例,本公开还提供一种智能安防机器狗200,包括如上的系统100,如图9所示,机器狗200的外观呈仿生狗形状,包括机身、至少两个行进轮220、头部230,至少两个第一步进电机151分别设置在至少两个行进轮220中,红外监控模块120设置于头部230,第一加速度传感模块140设置于机身中,按键模块 180设置于机身或头部230。其中,值得注意的是,机器狗200可以具有多个行进轮220,而本实施例中,第一步进电机151安装在机器狗200前方的两个行进轮220中,即与汽车的前轮驱动的类似。当然,多个第一步进电机151可以安装在多个行进轮220中,不应局限于两个第一步进电机151安装在两个行进轮220中。
61.在一实施例中,机器狗200的头部230通过第二步进电机153可在预设角度范围内转动地设置于机身上,在红外监控模块120检测到存在人体移动或高温物体时,主控模块110实时控制第二步进电机153停止转动,以使得红外监控模块120持续监控人体移动或高温物体。在机器狗200自由巡逻的过程中,除了绕指定路线行驶可以提高监控范围外,红外监控模块120的自由转动也可以提高监控范围,从而避免出现监控盲区。
62.在一实施例中,机器狗200的头部230具有眼部240,眼部240上覆盖有透明保护罩,而红外监控模块120则设置在眼部240之中,由透明保护罩保护,避免在极端天气中如下雨、飞沙走石对红外监控模块120造成损伤。
63.在一实施例中,机器狗200还具有可摆动的尾部250,具体可以通过凸轮和第三步进电机来实现小幅度的摆动,而尾部250的摆动可以用作对语音数据匹配成功时的回应。示范性的,在使用者发出停止扬声器单元131发出警报音的语音数据时,离线语音识别模块130中的处理单元133通过语音指令集合完成对该语音数据匹配,则该语音数据给主控模块110带来两种操作,一是停止扬声器单元131工作,二是通过第三步进电机对应的驱动芯片,控制第三步进电机转动,第三步进电机带动凸轮从而带动尾部250摆动。同理,在识别出其他语音数据如关闭红外监控模块120、停止巡逻时,使用者可以通过摆动的尾部250来得知该语音数据被成功识别,从而加强互动性和趣味性。
64.关于系统100在机器狗200的实施的各种细节说明在此不再赘述,可参见以上系统 100的实施例。
65.以上实施例具有以下有益效果:
66.1、本公开包含红外监控模块120,该模块可以即时监测是否有人体移动,由于在黑夜的情景下,可以准确地探测人体移动,并通过扬声器单元131作出警示,提醒安保人员。
67.2、通过设置离线语音识别模块130,可通过简单的语音指令来控制主控模块110。
68.3、红外监控模块120可以监测高温物体,因此在监控过程中可以针对火警情况进行预警。
69.4、配合设定的轨迹数据和第一加速度传感模块140,使得本公开可以沿着特定区域循环巡逻,大大拓宽了监控范围,提高了监控威慑力,以及相对应传统的多摄像头布置和联网设置的监控系统100,本公开大大减少了设备成本。
70.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。此外,本领域的技术人员能够理解,尽管在此所述的一些实施例包括其它实施例中所包括的某些特征而不是其它特征,但是不同实施例的特征的组合意味着处于本发明的范围之内并且形成不同的实施例。例如,在上面的权利要求书中,所要求保护的实施例的任意之一都可以以任意的组合方式来使用。公开于该背景技术部分的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1