无线功率传送系统及其方法与流程
1.本主题公开总体上涉及无线功率传送系统及其方法。
背景技术:
2.多种无线功率传送系统是已知的。典型的无线功率传送系统包括电连接到无线功率发射器的电源和电连接到负载的无线功率接收器。无线功率传送系统的示例包括磁无线功率传送系统和电无线功率传送系统。
3.在磁无线功率传送系统中,发射器具有感应线圈,该感应线圈将电能从电源传送到接收器的感应线圈。由于发射器和接收器的感应线圈之间的磁场耦合,会发生功率传送。当存在电场时,与磁场的幅度相比,电场的幅度较低。因此,通过电场耦合传送的功率很少(如果有的话)。这些磁无线功率传送系统的范围有限,并且为实现高效的功率传送,发射器和接收器的感应线圈必须处于最佳对准。还存在谐振磁无线功率传送系统,在该系统中,由于发射器和接收器的感应线圈之间的磁场耦合而传送功率。在谐振磁无线功率传送系统中,感应线圈使用至少一个电容器来进行谐振。在谐振磁无线功率传送系统中,通过谐振或非谐振电场耦合传送的功率很少(如果有的话)。谐振磁无线功率传送系统中的功率传送范围比非谐振磁无线功率传送系统中的功率传送范围有所增大,并且对准问题通常会被纠正。
4.在电无线功率传送系统中,发射器和接收器具有电容电极。由于发射器和接收器的电容电极之间的电场耦合,会发生功率传送。当磁场存在时,与电场的幅度相比,磁场的幅度较低。因此,通过磁场耦合传送的功率很少(如果有的话)。类似于谐振磁无线功率传送系统,也存在谐振电无线功率传送系统,在该系统中,使用至少一个电感器使发射器和接收器的电容电极谐振。在谐振电无线功率传送系统中,通过谐振或非谐振磁场耦合来传送的功率很少(如果有的话)。谐振电无线功率传送系统具有比非谐振电无线功率传送系统的功率传送范围更大的功率传送范围,并且对准问题通常会被纠正。
5.谐振电无线功率传送系统和谐振磁无线功率传送系统要求发射器和接收器两者都以相同的频率谐振。这个频率就是系统的谐振频率。在谐振电无线功率传送系统中,电感器的电抗由谐振频率下电容电极的电容来平衡。此外,在谐振电无线功率传送系统中,可以通过改变电感器的感应和/或电容电极的电容将发射器和接收器调谐到期望的谐振频率(例如,13.56mhz)。
6.环境中的外部导体和电介质材料(电介质)会影响谐振电无线功率传送系统产生的电场,从而影响系统的范围和效率。即使考虑到静态外部导体和电介质的影响,任何外部导体和/或电介质的移动都可能影响有效的功率传送。
7.具体地,在谐振电无线功率传送系统的电极上积累的电荷与在系统环境中的外部导体内自由移动的带电粒子(自由电荷)相互作用。这有效地将导体转变成浮动电极,并增加系统的电容。外部导体相对于系统的电容电极的移动将可变地改变系统的电容,这取决于外部导体和电容电极的相对位置。电容的变化改变了系统的谐振频率,使系统失谐。此
外,谐振电无线功率传送系统的谐振频率极易受其环境影响,因为电容器的电容取决于电极周围介质的介电常数(相对电容率的实部)。如果系统的电容电极的电容改变,例如由于周围介质中电介质的移动,系统的谐振频率将改变。
8.电介质由沿着电场自定向的极性分子组成。当电场被施加到电介质上时,电场产生的能量使分子旋转。分子的极性与电场的极性相反,降低了电场的强度,从而减小了无线功率系统的传送范围。外部导体中的自由电荷自行排列,从而创建与系统电容电极产生的电场相反的电场。这种与所产生的电场的相反减小了系统的范围。此外,由于导体的电阻,外部导体中运动的电荷以热的形式耗散能量。当电场被移除或逆转时,分子的一些旋转能量被恢复,而其余的能量以热的形式损失。散热损失的能量会降低系统的整体效率。当施加电场时(与真空相比),电介质储存和损失能量的能力分别表示为电介质的相对电容率的实部和虚部。
9.最常见和最有问题的电介质之一是水。由于水的高介电常数,少量的水会对系统的电容产生很大的影响。高介电常数也意味着低电场幅度和近场的快速衰减。水很容易溶解带电粒子,使其具有导电性。此外,水通常至少含有少量的自由电荷。水中的自由电荷被所产生的电场的电势差加速。电场给予的加速度从电场中提取能量,从而减小电场的幅度。同时水中自由电荷重新定向产生的电场也会与系统产生的电场相反。在室外环境中,谐振电无线功率传送系统会遇到不同量的水。空气中的水汽和土壤中的水分也可能存在于不受控制的室外环境中。因此,在室外环境中操作谐振电无线功率传送系统会带来挑战。
10.谐振电场耦合需要电感器来实现谐振。电感器不受欢迎,因为电感器效率低、不耐温度变化、重并且大。需要通过增加系统的电容来最小化电感器的缺点,减少达到谐振状态所需的电感。
11.kusunoki等人的美国专利申请公开第2015/0333538号公开了一种矩形六面体金属外壳,包围发射谐振器或接收谐振器以移除环境影响。矩形立方体结构具有一个开放面,以允许场耦合。外壳的深度必须至少是传送距离的一半。这种外壳可能体积庞大,并且不会显著降低实现谐振所需的电感。此外,大量制造这种外壳的成本很高。
12.因此,本发明的目的是至少部分地缓解所述的缺点。
技术实现要素:
13.因此,在一个方面,提供了一种无线功率传送系统,包括:谐振器,该谐振器包括:电容器,该电容器包括:至少两个有源电极;以及与有源电极相邻的无源电极,无源电极被配置为包围有源电极,以至少部分消除影响有源电极的环境影响;以及至少一个电连接到有源电极的感应线圈,其中,谐振器被配置为产生电场以传送功率或从产生的电场中提取功率。
14.在一个实施例中,无源电极向谐振器的电容器提供附加电容,并降低使系统谐振所需的感应线圈的电感。
15.在另一个实施例中,谐振器形成被配置为无线传送功率的发射器的一部分,其中,谐振器被配置为产生电场。在另一个实施例中,谐振器被配置成产生谐振电场。在另一个实施例中,无源电极的面积比发射谐振器的有源电极的面积至少大发射谐振器的有源电极之间的面积。
16.在另一个实施例中,谐振器是发射谐振器,并且系统还包括接收谐振器,接收谐振器包括至少两个有源电极。
17.在另一个实施例中,谐振器形成被配置为无线提取功率的接收器的一部分,其中,谐振器被配置为通过谐振电场耦合从产生的电场提取功率。在另一个实施例中,谐振器被配置为从产生的谐振电场中提取功率。
18.在另一个实施例中,有源电极是细长板。在另一个实施例中,无源电极的宽度大于或等于有源电极之一的宽度的两倍与有源电极之间的横向间隙的和,无源电极的长度大于或等于有源电极之一的长度。
19.在另一个实施例中,有源电极是同心的。
20.在另一个实施例中,有源电极中的至少一个是盘或环。
21.在另一个实施例中,无源电极是细长板或盘。
22.在另一个实施例中,无源电极是内径小于或等于内部有源电极内径的环。
23.在另一个实施例中,无源电极包括附着到无源电极边缘和/或沿着无源电极周界的耗散材料。
24.在另一个实施例中,感应线圈位于无源电极相对于有源电极的相反侧,并且感应线圈通过无源电极中的孔电连接到有源电极。
25.在另一个实施例中,电容器还包括:衬底,有源电极附着在衬底上;以及在衬底和无源电极之间延伸的致动器,该致动器可控制为改变有源电极和无源电极之间的间隔距离。在另一个实施例中,电容器还包括:在衬底和无源电极之间延伸的至少两个伸缩支撑件,支撑件被配置为随着有源电极和无源电极之间的间隔距离的变化而延伸或压缩。在另一个实施例中,致动器的致动由微控制器控制。
26.在另一个实施例中,无源电极接地。
27.在另一个实施例中,无源电极不接地。
28.根据另一方面,提供了一种无人驾驶飞行器(unmanned aerial vehicle,uav),包括:框架;推进系统,安装在框架上并被配置为提供uav的升力和推力;功率系统,安装在框架上并被配置为向推进系统供电,功率系统包括:谐振器,包括:电容器,该电容器包括:至少两个有源电极;以及与有源电极相邻的无源电极,无源电极被配置为包围有源电极,以至少部分消除影响有源电极的环境影响,其中,无源电极相对于有源电极与电场源相对;以及至少一个感应线圈,电连接到有源电极,其中,谐振器被配置为通过谐振电场耦合从产生的电场中提取功率;以及控制系统,安装在框架上并被配置为控制推进系统和功率系统。
29.根据另一方面,提供了一种无线功率传送系统,包括如前所述的uav,以及发射谐振器,发射谐振器包括:至少两个有源电极;以及至少一个感应线圈,其电连接到有源电极,其中,发射谐振器被配置为产生电场,以通过谐振电场耦合向uav传送功率。
附图说明
30.现在将参考附图更全面地描述实施例,其中:
31.图1是根据本公开的一方面的无线功率传送系统的示意布局;
32.图2是图1的无线功率传送系统的发射谐振器的有源电极的平面图;
33.图3是图1的无线功率传送系统的发射谐振器的有源电极的自阻抗相比于对不同
无源电极长度的无线功率传送系统的无源电极的无量纲宽度的图;
34.图4是图1的无线功率系统的射频(radio frequency,rf)效率相比于对不同无源电极长度的无线功率传送系统的无源电极的无量纲宽度的图;
35.图5是图1的无线功率传送系统的元件的端视图;
36.图6是图1的无线功率传送系统的无源电极的端视图;
37.图7是图1的无线功率传送系统的元件的电场图;
38.图8是图1的无线功率传送系统的元件的电场图;
39.图9是图1的无线功率传送系统的自电容和互电容的电路图;
40.图10是图1的无线功率传送系统的自电容相比于间隔距离的图;
41.图11是图1的无线功率传送系统的互电容相比于间隔距离的图;
42.图12是图1的无线功率传送系统的耦合系数相比于间隔距离的图;
43.图13是图1的无线功率传送系统的自电容相比于无源电极的宽度的图;
44.图14是图1的无线功率传送系统的互电容相比于无源电极的宽度的图;
45.图15是图1的无线功率传送系统的耦合系数相比于无源电极的宽度的图;
46.图16是图1的无线功率传送系统的自电容相比于无源电极的旋转角度的图;
47.图17是图1的无线功率传送系统的互电容相比于无源电极的旋转角度的图;
48.图18是图1的无线功率传送系统的耦合系数相比于无源电极的旋转角度的图;
49.图19是无线功率传送系统的另一实施例的元件的透视图;
50.图20是图19中元件的阻抗幅度相比于位移的图;
51.图21是图19中元件的阻抗相位相比于位移的图;
52.图22是图19中元件的不同测试材料的无线功率传送系统的rf效率的图;
53.图23是图19中元件的不同材料的谐振频率的变化的图;
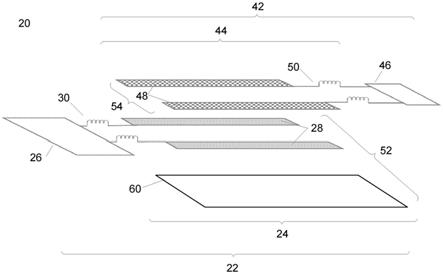
54.图24是图1的无线功率传送系统的发射谐振器的有源电极、接收谐振器的有源电极和接收无源电极的另一个实施例的透视图;
55.图25是图24的发射谐振器的有源电极的平面图;
56.图26是图24的发射谐振器的有源电极的自阻抗相比于无源电极归一化半径的图;
57.图27是包括图24的有源电极和无源电极的无线功率传送系统的rf效率相比于图24的无源电极的归一化半径的图;
58.图28是图25中制造的有源电极的平面图;
59.图29是与图28的有源电极一起使用的图1的无线功率传送系统的无源电极的另一个实施例的透视图;
60.图30是在不同测试材料上有和没有图29的无源电极的情况下发射谐振器的有源电极的电容图;
61.图31是根据本公开一方面的无线功率传送系统的另一个实施例的示意布局;
62.图32是根据本公开一方面的无线功率传送系统的另一个实施例的示意布局;
63.图33是图32的无线功率传送系统的发射谐振器和接收谐振器以及无源电极的另一个实施例的透视图;
64.图34是从图33的系统发出的电场的等高线图;
65.图35是从图33的系统发出的电场的另一个等高线图;
66.图36是从图33的系统发出的电场的另一个等高线图;
67.图37是图1的无线功率传送系统的电容器的另一个实施例的侧视图;
68.图38是装有位于发射器上方的接收器和无源电极的自动车辆的正视图;
69.图39是示出图38中发射器和接收器的rf效率相比于介电特性的表格;
70.图40是示出图38中发射器和接收器的rf效率相比于介电常数的表格;
71.图41是示出为电源供电时看到的图38中发射器和接收器的阻抗相位相比于介电特性的表格;
72.图42是示出为电源供电时看到的图38中发射器和接收器的阻抗相位相比于介电常数的表格;
73.图43是根据本公开的一方面的uav的透视图;
74.图44是图43的uav的仰视图;
75.图45是图43的uav的侧视图;
76.图46是图43的uav的电容器的透视图;
77.图47是图43的uav的电容器的仰视图;以及
78.图48是包括图43的uav的电容器的部分无线功率传送系统的透视图。
具体实施方式
79.当结合附图阅读时,将更好地理解前面的概述以及下面对某些示例的详细描述。如本文所使用的,以单数引入并以单词“一”或“一个”开头的元件或特征应该理解为不一定排除多个元件或特征。此外,对“一个示例”或“一个实施例”的引用不旨在被解释为排除也包含所描述的元件或特征的附加示例或实施例的存在。此外,除非明确声明相反,否则“包括(comprising)”或“具有(having)”或“包含(including)”具有特定属性的元件或特征或多个元件或多个特征的示例或实施例可以包括不具有该属性的附加元件或特征。同样,应当理解,术语“包括”、“具有”、“包含”意味着“包括但不限于”,并且术语“包括”、“具有”和“包含”具有等同的含义。还应当理解,在整个说明书和附图中,相同的附图符号用于指代相同的元件。
80.如本文所使用的,术语“适用于”和“配置为”意味着元件、组件或其他主题被设计和/或旨在执行给定的功能。因此,术语“适用于”和“配置为”的使用不应被解释为意味着给定的元件、组件或其他主题简单地“能够”执行给定的功能,而是元件、组件和/或其他主题是为执行功能的目的而专门选择、创建、实施、利用和/或设计的。被描述为适用于执行特定功能的元件、组件和/或其他主题可以附加地或替代地被描述为配置为执行该功能,反之亦然,这也在本申请的范围内。类似地,被描述为配置为执行特定功能的主题可以附加地或替代地被描述为可操作来执行该功能。
81.应当理解,当一个元件被称为“在上面”、“附接到”、“连接到”、“耦合到”、“接触”等另一个元件时,该元件可以直接在另一个元件上、直接附接到另一个元件、直接连接到另一个元件、直接耦合到另一个元件或直接接触另一个元件,或者也可以存在中间元件。
82.除非另有定义,本文使用的所有技术和科学术语具有与本主题公开所属领域的技术人员通常理解的相同含义。
83.现在转到图1,示出了一种无线功率传送系统,并且通常由附图标记20标识。无线
功率传送系统20包括谐振器。谐振器包括电容器52和两个感应线圈30。电容器52包括两个有源电极28和与有源电极28相邻的无源电极60。无源电极60被配置为包围有源电极28,以至少部分消除影响有源电极28的环境影响。无源电极60被配置为向系统提供附加电容。无源电极60被配置为降低实现谐振所需的电感。每个感应线圈30电连接到有源电极28。
84.出于本主题申请的目的,当下列情况中的至少之一发生时,无源电极60被认为包围有源电极28。(i)如果由有源电极28的周界限定的区域被投影到无源电极60的区域上,该投影整体在无源电极60的区域内;(ii)有源电极28的投影区域被无源电极60的区域外接;(iii)无源电极60的面积比有源电极28的周界所限定的总面积大了至少有源电极28之间的面积。
85.无源电极60放置在有源电极28和环境之间。尽管实际环境位于无源电极60与有源电极28相对的一侧,无源电极通过向有源电极提供大致恒定的环境,至少部分地消除了影响有源电极28的环境影响。
86.无源电极60增加了电容器52的电容。电容的增加降低了感应线圈在特定频率下实现谐振所需的电感。
87.在该实施例中,谐振器是发射谐振器24。发射谐振器24形成发射器22的一部分。如下所述,发射谐振器24被配置为产生电场以传送功率。发射器22包括电连接到发射谐振器24的电源26。具体地,电源26电连接到发射谐振器24的感应线圈30。
88.在该实施例中,发射谐振器24的组件被配置为在近场中操作,如下所述。因此,无源电极60被配置为在近场中操作。
89.在该实施例中,电源26是输出源信号的rf电源。源信号通常是正弦信号。例如,在该实施例中,源信号的频率是13.56mhz。
90.虽然两个感应线圈30被示出为串联连接到电源26,但是本领域技术人员将理解,单个感应线圈30可以用于发射谐振器24的两个有源电极28。在该实施例中,单个感应线圈30并联地电连接到电源26和有源电极28。
91.每个有源电极28电连接到感应线圈30,感应线圈30电连接到电源26。电容器52被配置为与感应线圈30谐振,以产生电场来传送功率,如将要描述的。
92.在该实施例中,发射谐振器24的有源电极28横向间隔开。有源电极28是共面的。有源电极28是导体。在该实施例中,导体是细长的且通常为矩形的平板。导体由铜箔带形成。虽然描绘了两个有源电极28,但是本领域技术人员将理解,可以使用更多的有源电极28。在该实施例中使用铜箔带并不意味着限制本公开的范围或精神,因为本领域技术人员将理解,可以使用其他传导材料,例如但不限于铝箔或印刷电路板(printed circuit board,pcb)。
93.在该实施例中,无源电极60包括细长元件。细长元件由导电材料形成。细长元件为具有相对主表面的大致矩形平板的形式。
94.无源电极60与有源电极28相邻。无源电极60包围有源电极28。无源电极60和有源电极28形成电容器52。在该实施例中,无源电极60大致平行于有源电极28。有源电极28和无源电极60在大致平行的平面上。
95.在该实施例中,无源电极60不接地。无源电极60是单独的。
96.在该实施例中,无源电极60是非辐射的。
97.在另一个实施例中,无源电极60接地。
98.在另一个实施例中,无源电极60不是单独的。
99.在该实施例中,无源电极60在电学上较小。当无源电极60的物理长度小于λ/10时,无源电极60在电学上较小。λ是来自电源的源信号的波长。对于由电源26输出的频率为13.56mhz的源信号,λ约为22m。因此,当无源电极60的物理长度小于大约2.2m时,无源电极60在电学上较小。
100.无源电极60的厚度受到电流的趋肤深度(d)的限制。趋肤深度(d)是导体表面以下的深度,在该深度处,电流与表面电流相比减少了e
‑1倍。趋肤深度(d)取决于无源电极60的电导率(σ)和磁导率(μ)以及电流频率(ω)。它由以下等式定义:
[0101][0102]
无源电极60应该至少是趋肤深度的五倍厚,以允许电流在无源电极60的两个主面上不受阻碍地流动。
[0103]
在该实施例中,无线功率传送系统20还包括接收器42。接收器42包括电连接到负载46的接收谐振器44。接收谐振器44被调谐到发射谐振器24的谐振频率。接收谐振器44包括两个有源电极48和两个感应线圈50。感应线圈50电连接到有源电极48,并串联电连接到负载46。负载46包括需要功率的设备。例如,负载46包括电池。
[0104]
虽然两个感应线圈50被示出为串联连接到负载46,但是本领域技术人员将理解,单个感应线圈50可以用于接收谐振器44的两个有源电极48。
[0105]
在该实施例中,两个感应线圈50并联地电连接到负载46和接收谐振器44的有源电极48。本领域技术人员还将理解,多于两个感应线圈50可以串联连接到负载46。
[0106]
每个有源电极48电连接到感应线圈44,感应线圈44电连接到负载46。有源电极48被配置为与感应线圈44谐振,以通过谐振电场耦合从发射器22提取功率,如将要描述的。
[0107]
在该实施例中,接收谐振器44的有源电极48横向间隔开。有源电极48是共面的。有源电极48平行于发射谐振器24的有源电极28。有源电极48是导体。在该实施例中,导体是细长的且通常为矩形的平板。导体具有相对的主表面。导体由铜箔带形成。
[0108]
虽然描绘了两个有源电极48,但是本领域技术人员将理解,可以使用更多的有源电极48。虽然提到了铜箔带,但是本领域技术人员将会理解,可以使用其他传导材料,包括但不限于铝或pcb。
[0109]
虽然有源电极28和48被描述为横向间隔开的、细长的和通常为平面矩形板,但是本领域技术人员将会理解,其他配置也是可能的,包括但不限于同心的、共面的、圆形的、椭圆形的、圆盘形等的电极。美国专利申请第14/846,152号中描述了其它合适的电极配置,其相关部分并入本文。
[0110]
其他组件可以连接到负载46,但在图1中未示出。这些包括但不限于整流器和调节器。
[0111]
在2012年9月7日提交的polu等人的美国专利申请第13/607,474号中描述了无线功率传送系统20的一些组件,该申请于2017年5月16日作为美国专利第9,653,948号公布,其相关部分并入本文。
[0112]
虽然已经大致描述了有源电极28和无源电极60,为测试和仿真中使用而进一步描述具体尺寸和配置。现在转到图2,示出了发射谐振器24的有源电极28的平面图。如前所述,在该实施例中,有源电极28是共面的。有源电极28是细长且通常为矩形平板。每个板的长度h=100mm,宽度w=50mm。板之间的横向间隙g为50mm。如前所述,无源电极60与有源电极28平行。无源电极60和有源电极28之间的间隔为6mm。虽然示出了发射谐振器24的有源电极28,但是接收谐振器44的有源电极48具有相同的尺寸。
[0113]
如前所述,在该实施例中,发射谐振器24的有源电极28与接收谐振器44的有源电极48平行。发射谐振器24的有源电极28和接收谐振器44的有源电极48之间的间隔为75mm。本领域技术人员将理解,虽然在该实施例中发射谐振器24的有源电极28与接收谐振器44的有源电极48平行,但是发射谐振器24的有源电极28不与接收谐振器44的有源电极48平行的其他配置也是可能的。
[0114]
在该实施例中,无源电极60具有宽度(x)和长度(y)。用具有上述尺寸的无源电极60和有源电极28进行仿真。这些仿真的结果如图3和图4所示。图3是描绘对于不同长度比(y/h)的比率(x/(2*w+g))和发射谐振器24的自阻抗之间的关系的图。图中所示的不同曲线具有不同的长度(y),其在图例中示为无源电极60的长度(y)与有源电极28的长度(h)的比率。随着比率(y/h)从0.25增加到1.00,发射谐振器24的自阻抗增加;然而,将该比率增加超过(y/h)=1不会进一步增加无源电极60对发射谐振器24的自阻抗的影响。当比率(x/(2*w+g))大于或等于1时,发射谐振器24的自阻抗保持恒定。当无源电极60的长度(y)小于有源电极28的长度(h)并且无源电极60的宽度(x)小于值(2*w+g)时,无源电极60不再包围发射谐振器24的有源电极28;因此,发射谐振器24的自阻抗易受环境影响。因此,无源电极60的最小长度(y)等于有源电极28的长度(h)。无源电极60的最小宽度(x)等于值(2*w+g)。因此,对于宽度(w)为50mm、横向间隙(g)为50mm、并且长度(y)为100mm的有源电极28,无源电极60的长度(h)为100mm,并且无源电极60的宽度(x)为150mm。
[0115]
图4是描绘对不同的长度比(y/h)的无源电极60的宽度比(x/(2*w+g))和系统20的rf效率之间的关系的图。系统20的rf效率被定义为发射谐振器24和接收谐振器44之间的无线功率传送的效率。rf效率没有考虑系统20中存在的其他组件(例如电源26和负载46)的低效率。图中所示的不同曲线具有不同的长度(y),其在图例中示为无源电极60的长度(y)与有源电极28的长度(h)的比率。随着比率(y/h)从0.25增加到1.25,系统20的rf效率增加。如图4所示,将比率(y/h)增加到1.25以上会大大提高系统20的rf效率。此外,如图4所示,当无源电极60的宽度(x)大于有源电极28的宽度(w)的两倍加横向间隙(2*w+g)并且无源电极60的长度(y)大于有源电极28的长度(h)时,系统20的rf效率保持相对恒定。对于长度(y)大于有源电极28的长度(h)并且宽度(x)大于值(2*w+g)的无源电极60,rf效率稳定。
[0116]
基于图3和图4在图中描绘的关系,为了使该实施例中的系统20的rf效率超过大约80%,并且为了使发射谐振器24的自阻抗小于或等于大约2700ω,无源电极60必须具有超过有源电极28的长度(h)的长度(y)和超过值(2*w+g)的宽度(x)。通常,当发射谐振器24的有源电极28是共面的细长平行板时,则它们可以如图2所描述的,有效无源电极60具有大于或等于值(2*w+g)的宽度(x),并且具有大于或等于有源电极28的长度(h)的长度(y)。
[0117]
虽然已经对系统20进行了总体描述,并且已经为有源电极28和无源电极60提供了特定的尺寸,但是本领域技术人员将会理解,变化是可能的。此外,系统20的组件的特定值
被提供用于测试和仿真。在图2所示的发射谐振器24的有源电极28的另一个实施例中,有源电极28的每个板的长度为h=100,宽度为w=37.5mm。板之间的横向间隙g为25mm。此外,在该实施例中,无源电极60的宽度为x=120mm并且长度为y=120mm。接收谐振器44的有源电极48具有与发射谐振器24的有源电极28相同的尺寸。发射谐振器24的有源电极28和接收谐振器44的有源电极48之间的间隔距离为d=20mm。发射谐振器24的有源电极28和无源电极60之间的间隔距离为d1=2mm。
[0118]
此外,在该实施例中,发射谐振器24的电感器30的电感是12.7μh。在该实施例中,发射谐振器24的品质因数为250(q=250)。系统20的效率为93%。系统20的输入阻抗zin=70ω。输入阻抗是系统20向发射器22看入的阻抗。
[0119]
如前所述,无源电极60降低了系统20所需的电感。从系统20移除无源电极60会导致所需电感的增加。具体地,在该实施例中,从系统20移除无源电极60导致发射谐振器24的电感器30的电感从12.7μh增加到63μh。为了保持至少30的可接受品质因数(q>30),具有63μh电感的电感器30的所需尺寸对于系统20来说是禁止的。如果系统20传送的功率大于1w,这一点尤其正确。
[0120]
移除了无源电极60的系统20的效率为88%。移除了无源电极60的系统20具有输入阻抗zin=12.5kω。移除了无源电极60的输入阻抗zin对于有意义的功率传送(>1w)来说太大,因为电源26的输出将受到其最大输出电压的限制。因此,需要额定为1.25的电源26来给系统20供电。大多数高效rf电源(效率>80%,诸如d类反相器)设计在范围10
‑
100ω内工作。因此,这些rf电源不适合具有如此大输入阻抗的系统20。因此,无源电极60降低了输入阻抗zin。具体地,在该实施例中,无源电极60将系统20的输入阻抗zin从12.5kω降低到80ω。
[0121]
虽然已经为有源电极28和48以及无源电极60提供了特定的尺寸,但是本领域技术人员将会理解,变化是可能的。现在转到图5,示出了发射谐振器24的有源电极28、接收谐振器44的有源电极48和无源电极60的端视图。w1和w2表示发射谐振器24的有源电极28的宽度。g1表示发射谐振器24的两个有源电极28之间的横向间隙。w3和w4表示接收谐振器44的有源电极48的宽度。g2表示接收谐振器44的两个有源电极48之间的横向间隙。d表示发射谐振器24的有源电极28和接收谐振器44的有源电极48之间的间隔距离。ws表示无源电极60的宽度。d1表示发射谐振器24的有源电极28和无源电极60之间的间隔距离。在该实施例中,发射谐振器24的有源电极28、接收谐振器44的有源电极48和无源电极60都在平行平面中。此外,在该实施例中,w1=w2=w3=w4=2英寸,g1=g2=1英寸,d=d1=1英寸,并且电极(28、48和60)在页面中的长度l是33英寸。
[0122]
现在转到图6,示出了无源电极60的端视图。无源电极60相对于平行于发射谐振器24的有源电极28的平面的平面的旋转角度由表示。旋转角度表示无源电极60的纵向或横向旋转。在该实施例中,旋转角度表示无源电极60的纵向旋转。改变旋转角度会影响如下所述的系统参数。
[0123]
在操作期间,功率通过发射谐振器24的感应线圈30从电源26传送到有源电极28。经由感应线圈30发送到有源电极28的、来自电源26的源信号激励发射谐振器24,使得发射谐振器24产生电场。在该实施例中,产生的电场是近场。在发射谐振器24的有源电极28上施加差分电压,这在周围环境中建立电场。当接收谐振器44被放置于所产生的电场内并与发
射谐振器24的谐振频率相一致时,接收谐振器44通过谐振电场耦合从发射谐振器24提取电能。然后,所提取的电能通过感应线圈50从接收谐振器44传送到负载46。虽然发射谐振器24产生磁场,但是通过磁场耦合传送的功率很少(如果有的话)。
[0124]
由于功率传送是高度谐振的,发射谐振器24和接收谐振器44的有源电极28和48不需要分别像非谐振电无线功率传送系统的情况那样靠近或对准。
[0125]
如前所述,无源电极60用于减少对发射谐振器24的有源电极28的环境影响,使得有源电极28拥有大致恒定的环境,而不管无源电极60相对于有源电极28的另一侧的实际环境如何。响应于发射谐振器24产生的电场,在无源电极60上瞬时感应出表面电荷。对于金属(例如铜和铝)、合金(例如钢和黄铜)和其他导体,例如石墨烯或导电织物,电荷耗散时间大约为10
‑
19
秒。当系统20的谐振频率为13.56mhz时,电场的振荡周期大约为10
‑9秒。因此,电荷耗散时间比电场的振荡周期小许多数量级。因此,电荷再分布可以被认为是瞬时的。
[0126]
感应的表面电荷创建其自身的电场,该电场对抗由发射谐振器24产生的电场,因为带负电的粒子将被吸引到高电势表面上的区域,在该区域它们的存在将抵消平行于表面的电场。因此,作用在与有源电极28相邻的无源电极60的主表面上的净电场垂直于无源电极60的表面。因此,由发射谐振器24产生的电场终止于无源电极60,并且不绕过无源电极60。与发射谐振器24的有源电极28相对的无源电极60的导电表面充当无源电极60产生的电场的边界。因此,无源电极60相对侧的环境变化不会影响另一侧的电场。
[0127]
如前所述,发射谐振器24产生的电场在无源电极60上感应出表面电荷。因此,与包括有源电极28而没有无源电极60的电容器相比,无源电极60向发射谐振器24的电容器52提供了附加电容。无源电极60表面的净电场充当发射谐振器24的电容器52的能量存储介质。这样,发射谐振器24的有源电极28和无源电极60形成电容器52,电容器52的电容大于仅包括有源电极28的电容器的电容。
[0128]
由有源电极28和无源电极60形成的电容器52提供的附加电容减少了在谐振频率下谐振所需的电感量。如前所述,在该实施例中,发射谐振器24和接收谐振器44的感应线圈30和50分别是铁氧体磁芯电感器。常用的铁氧体电感器很重,有损耗,并且由于铁芯饱和和发热而限制了功率。因此,需要降低感应线圈30和50所需的电感。由无源电极60提供的电容器52的附加电容降低了每个感应线圈30和50所需的电感。无源电极60离发射谐振器24的有源电极28越近,加到发射谐振器24的电容器52上的电容越大,并因此感应线圈30和50所需电感的减少量越大。
[0129]
然而,如前所述,在无源电极60上感应的表面电荷创建与发射谐振器24产生的电场相反的电场。无源电极60离发射谐振器24的有源电极28越近,反向电场越大,这降低了发射谐振器24的有源电极28产生的电场的强度。这减小了由发射谐振器24产生的电场的电势范围,因此当耦合场较弱时,这要求接收谐振器44更靠近发射谐振器24。
[0130]
因此,系统20的设计者可以平衡感应线圈30和50的期望电感、发射谐振器24和接收谐振器44之间的期望距离以及添加到发射谐振器24的电容器52的期望附加电容。根据系统20将被使用的应用,可以改变发射谐振器24的有源电极28与无源电极60之间的距离,以获得期望的电感、谐振器之间的距离和附加电容。
[0131]
此外,可以理解,选择无源电极60和有源电极28之间的距离,以实现电容器52的电容和耦合场强度之间的期望平衡。电容器52的电容和耦合场强度之间的平衡可以根据系统
20的特定应用而变化。
[0132]
如果没有无源电极60,发射谐振器24的有源电极28可能不能提供足够的电容以在谐振频率谐振,除非增加体积庞大的电感器30,这会使系统20的重量加倍,这使得系统20不实用。如上所述,将无源电极60放置在发射谐振器24的有源电极28附近增加了电容并降低了所需的电感。与不包括无源电极60的系统20相比,较小的电感器30可以提供减小的电感并减小整个系统20的重量。
[0133]
现在转到图7和图8,示出了系统20的有源电极28和无源电极60在操作期间的电场图。图7和图8示出了当无源电极60存在时,发射谐振器24产生的电场强度降低。图7是将由有源电极28和无源电极60形成的电容器52的净电场建模的电场图,该净电场建模为两个相反偶极电场的总和:由发射谐振器24产生的电场和由无源电极60上感应的表面电荷创建的反向电场。
[0134]
图7和图8所示的电场图表明,与被真空包围的偶极子相比,系统20中无源电极60的存在产生不太强的偶极电场。因此,模型还表明,与不包括无源电极60的系统相比,无源电极60在系统20中的存在产生不太强的偶极电场。
[0135]
现在转到图9,示出了系统20的电容的电路图。发射电容器52的等效电容(c
tx
)是发射电容器52中产生的电容,该电容对与接收谐振器44的有源电极48耦合的谐振电场没有贡献。接收电容器54的等效电容(c
rx
)是在接收谐振器44的有源电极48之间产生的电容,该电容对与发射谐振器24的有源电极28耦合的谐振电场没有贡献。发射电容器52和接收电容器54的电容(分别为c
tx
和c
rx
)降低了系统20的谐振频率。发射器
‑
接收器对的互电容(c
m
)是在发射谐振器24的有源电极28和接收谐振器44的有源电极48之间产生的电容。互电容负责发射器22和接收器42之间的耦合,因此决定了耦合强度。发射器22和接收器42之间的耦合系数是(cc),并且由以下公式给出:
[0136][0137]
使用矩量法进行的电磁仿真检查了无源电极60对等效电容(c
tx
)的影响。
[0138]
使用矩量法进行的电磁仿真检查了无源电极60对发射电容器52的等效电容(c
tx
)、接收谐振器44的有源电极48之间的等效电容(c
rx
)、互电容(c
m
)和耦合系数(cc)的影响。在电磁仿真中,d1、ws和是变化的。仿真结果如图10至图18所示,描述如下。
[0139]
现在转到图10,示出了描绘发射电容器52的等效电容(c
tx
)和接收谐振器44的有源电极48之间的等效电容(c
rx
)相比于发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)的图。随着发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)从0.5英寸增加到2.5英寸,发射电容器52的等效电容(c
tx
)从大约29pf减小到大约18.5pf。相反,随着发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)从0.5英寸增加到2.5英寸,接收谐振器44的有源电极48之间的等效电容(c
rx
)保持相对恒定。
[0140]
现在转到图11,对于d=1,示出了描绘互电容(c
m
)相比于发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)的图。随着间隔距离(d1)从0.5英寸增加到2.5英寸,互电容(c
m
)从大约7.71pf增加到大约7.97pf。
[0141]
现在转到图12,示出了描绘耦合系数(cc)相比于发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)的图。随着间隔距离(d1)从0.5英寸增加到2.5英寸,耦合系
数(cc)从大约0.115增加到0.195。对于图10至图12所示的数据,无源电极60的宽度(ws)等于5英寸,并且旋转角度为0
°
。
[0142]
现在转到图13,示出了描绘发射电容器52的等效电容(c
tx
)和接收谐振器44的有源电极48之间的等效电容(c
rx
)相比于无源电极60的宽度(ws)的图。随着无源电极60的宽度(ws)从2.5英寸增加到5.5英寸,发射电容器52的等效电容(c
tx
)从大约23pf增加到大约29.5pf。相反,当无源电极60的宽度(ws)从2.5英寸增加到5.5英寸时,接收谐振器44的有源电极48之间的等效电容(c
rx
)保持相对恒定在大约18pf。
[0143]
现在转到图14,示出了描绘互电容(c
m
)相比于无源电极60的宽度(ws)的图。随着宽度(ws)从2.5英寸增加到5.5英寸,互电容(c
m
)从大约8.02pf减少到大约7.60pf。
[0144]
现在转到图15,示出了描绘耦合系数(cc)相比于无源电极60的宽度(ws)的图。随着宽度(ws)从2.5英寸增加到5.5英寸,耦合系数(cc)从大约0.16减小到大约0.11。对于图13至图15中描述的数据,间隔距离(d1)等于1英寸,并且旋转角度为0
°
。
[0145]
现在转到图16,示出了描绘发射电容器52的等效电容(c
tx
)和接收谐振器44的有源电极48之间的等效电容(c
rx
)相比于无源电极60的旋转角度的图。当无源电极60旋转并且旋转角度在任一方向上远离零增加和减小时,发射电容器52的等效电容(c
tx
)从大约21.5pf增加到大约23.5pf。此外,当无源电极60旋转并且旋转角度在任一方向上远离零移动时,接收谐振器44的有源电极48之间的等效电容(c
rx
)从大约18.9pf减小到大约18.8pf。发射电容器52的等效电容(c
tx
)受发射谐振器24的有源电极28中的一个和无源电极60之间的电容增加的影响,以及受发射谐振器24的有源电极28中的另一个和无源电极60之间的电容减小的影响。
[0146]
现在转到图17,示出了描绘互电容(c
m
)相比于无源电极60的旋转角度的图。随着无源电极60旋转并且旋转角度在任一方向上远离零移动,互电容(c
m
)从大约7.80pf增加到大约7.89pf。这大约0.09pf的变化小于当无源电极60的宽度(ws)变化时观察到的大约0.42pf的变化,并且小于当发射谐振器24的有源电极28和无源电极60之间的间隔距离(d1)变化时观察到的大约0.26pf的变化。
[0147]
现在转到图18,示出了描绘耦合系数(cc)相比于无源电极60的旋转角度的图。当无源电极60旋转并且旋转角度在任一方向上远离零移动时,耦合系数(cc)从大约0.158减小到大约0.149。由于发射电容器52的发射等效电容(c
tx
)的变化在互电容(c
m
)的变化和接收器等效电容(c
rx
)的变化中占主导,所以耦合系数减小。由于发射谐振器24的有源电极28通过无源电极60旋转旋转角度而移近无源电极60,发射电容器52的等效电容(c
tx
)增加。由于无源电极60远离有源电极28之间的间隙(g1)移动,互电容(c
m
)增加。对于图16至18中描绘的数据,无源电极60的宽度(ws)等于5英寸,并且间隔距离(d1)等于1英寸。
[0148]
虽然已经描述了系统20的特定实施例,但是本领域技术人员将会理解,变化是可能的。在另一个实施例中,系统20还包括位于发射谐振器24的有源电极28和无源电极60之间的电介质。电介质具有与无源电极60相同的长度和宽度。该电介质的介电常数为3.48,并且在10ghz时损耗角正切为0.0037。电介质具有高击穿电压。具有高击穿电压的电介质降低
了电弧放电(arcing)的可能性。这允许系统20在高功率级别下操作。电介质的示例包括:玻璃纤维和热塑性塑料。热塑性塑料的示例包括聚乙烯和聚丙烯。
[0149]
除非无源电极60已经接地,否则无源电极60的电势将在有源电极的电压之间浮动。取决于系统20的精确规格,发射谐振器的有源电极28通常具有数百伏的电势。在该实施例中,发射谐振器的有源电极28的电势大约为600v。在有源电极28和无源电极60之间创建电场,并且随着有源电极28和无源电极60移动得更近,电场的幅度将增加。当设计系统20时,必须小心避免在无源电极60和有源电极28之间电弧放电。电弧放电会损坏系统20的组件并起火。
[0150]
通过降低有源电极28和无源电极60之间的电势差,可以降低电弧放电的可能性。在该实施例中,低于3
×
106v/m的电场确保不会发生电弧放电,因为3
×
106v/m是空气的近似介电击穿电压。为了保持相同的功率传送,必须增大系统20的电流。电流的增大增加了系统20的电阻损耗。电弧放电的可能性也可以通过传送较少的功率来降低。位于发射谐振器的有源电极28和无源电极60之间的电介质减小了有源电极28和无源电极60之间的电势差。因此,电介质减少了电弧放电的可能性。
[0151]
现在转到图19,示出了无线功率传送系统的另一个实施例的元件的透视图。无线功率系统通常由附图标记120标识。图19中示出的无线功率传送系统120类似于先前描述的无线功率传送系统20,并且同样地,相同的元件用增加了100的相同参考符号来指代。图19分别示出了发射谐振器和接收谐振器的有源电极128和148,以及系统120的无源电极160。虽然系统120包括另外的组件,但是这些没有在图19中描绘。如前所述,发射谐振器的有源电极128和无源电极160形成电容器152。在该实施例中,为了仿真的目的,发射谐振器的有源电极128彼此电连接,并且接收谐振器的有源电极148彼此电连接。在该实施例中,每个有源电极128和148由铜形成,然而,本领域技术人员将理解,其他金属也是可能的。在该实施例中,发射谐振器的谐振频率是系统120的13.56mhz。在该实施例中,每个有源电极128和148是50mm乘200mm。发射谐振器的有源电极128距离接收谐振器的有源电极148 100mm。无源电极160是400mm乘600mm。
[0152]
在该实施例中,测试材料块170位于无源电极160的与有源电极128相对的一侧。测试材料块170表示可能存在于系统120的操作环境中的不同介质。测试材料块170呈现为铝、混凝土、干地、湿地、水、海水或木材的块。
[0153]
如前所述,与不包括无源电极160的无线功率传送系统相比,无源电极160的附加电容也降低了无线功率传送系统120中的感应线圈(未示出)在13.56mhz的谐振频率下操作所需的电感。在该实施例中,使系统120的感应线圈谐振所需的电感从43.2μh减少到39.5μh。
[0154]
使用cst微波工作室软件进行电磁场仿真,以证明系统120对于测试材料块170的不同材料在发射器和接收器之间的纵向位移范围内的稳定性。现在转到图20和图21,示出了分别描绘向发射谐振器看入的阻抗幅度和相位相比于接收器距发射器的纵向位移的图。在图20和图21的前三种情况下,不存在无源电极160,并且材料块170是混凝土、盐水和真空。在图20和图21的最后三种情况下,存在无源电极160,并且材料块170是混凝土、盐水和真空。
[0155]
向发射谐振器看入的恒定阻抗是期望的,因为电源通常被优化以有效地向给定的
负载阻抗输送功率。根据发射谐振器和接收谐振器的调谐、系统120负载阻抗以及发射谐振器和接收谐振器之间的耦合程度,发射谐振器的输入阻抗在操作期间显著变化。无源电极160使影响有源电极128的环境影响最小化。无源电极160还向系统120提供附加电容,降低了所需的电感。
[0156]
如图20所示,具有无源电极160的情况在幅度上通常是一致的,与测试材料块170的测试材料无关。在没有无源电极160的情况下,向发射谐振器看入的阻抗幅度显著变化。
[0157]
现在转到图21,当存在无源电极160时,在90mm至180mm的位移范围内,发射电极128和接收电极148之间的相位变化小于20度。然而,当不存在无源电极160时,该变化高达80度。通常,低相位角是优选的,因为难以设计无线功率传送系统120使得所有相位都可以被适应。
[0158]
现在转到图22,示出了在测试材料块170具有更多种材料的情况下系统120的rf效率。当测试材料块170不存在时,rf效率被标记为真空。在其他配置中,测试材料块170呈现为铝、混凝土、干地、湿地、水、海水或木材的块。系统120在测试材料的真空和发射电极128和接收电极148之间150mm的位移下被调谐。
[0159]
对于每个测试材料块170,具有无源电极160的系统120具有几乎恒定的87%的rf效率,而没有无源电极160的系统120具有的rf效率从测试材料块170是铝时的56%变化到测试材料块170不存在时的89%(在图22中标记为真空)。
[0160]
现在转到图23,示出了在测试材料块170的各种材料的情况下系统120的谐振频率的变化。当测试材料块170不存在时,谐振频率被标记为真空。测试材料块呈现为铝、混凝土、干地、湿地、水、海水或木材制成的块。如前所述,系统120的谐振频率为13.56mhz。如图23所示,当系统120中不存在无源电极160时,系统20的谐振频率根据测试材料块170而变化。然而,当无源电极160存在于系统120中时,系统120的谐振频率是恒定的,没有变化。当无源电极160存在时,无论测试材料块170的材料如何,频率的变化(δf)都为零。没有无源电极160的系统120的谐振频率根据测试材料块170从13.56mhz变化到13.30mhz。当无源电极160不存在时,根据测试材料块170的材料,频率的变化(δf)从0mhz变化到超过0.25mhz。
[0161]
虽然已经描述了有源电极28和48以及无源电极60的特定尺寸和形状,但是本领域技术人员将会理解,变化是可能的。图24示出了有源电极228和248以及无源电极260的另一个实施例。
[0162]
在该实施例中,发射谐振器的有源电极228是环形和圆盘形的两个同心电极。接收谐振器的有源电极248是环形和圆盘形的两个同心电极。无源电极260是盘电极。有源电极228和248以及无源电极260共面。如前所述,发射谐振器的有源电极228和无源电极260形成电容器252。
[0163]
虽然无源电极260已经被描述为盘电极,但是本领域技术人员将会理解,其他配置也是可能的。在另一个实施例中,无源电极260是内径小于或等于内部有源电极内径的环。
[0164]
出于本主题申请的目的,同心被定义为至少包括以下之一:(i)两个电极具有共同的中心轴,(ii)两个电极具有共同的旋转中心,(iii)两个电极具有共同的质量中心,(iv)两个电极具有共同的体积中心,(v)两个电极具有共同的曲率中心,(vi)两个电极的外电极包围两个电极的内电极,(vii)通过在z轴上延伸外电极的外围形成的形状包围内电极。
[0165]
现在转到图25,示出了发射谐振器的有源电极228的平面图。如前所述,有源电极
228是两个同心电极,是环270和盘272的形式。环270的外径r为50mm,并且内径r
in
为35mm。盘272的外径r为25mm。因此,环270和盘272之间的距离为10mm。在该实施例中,发射谐振器的有源电极228和接收谐振器的有源电极248之间的间隙为24mm。发射谐振器的有源电极228和无源电极260之间的间隔距离为3mm。虽然示出了发射谐振器的有源电极228,但是接收谐振器的有源电极248具有相同的尺寸。
[0166]
由于无源电极260包围发射谐振器的有源电极228,无源电极260的半径必须大于发射谐振器的有源电极228的盘272的外径r。
[0167]
现在转到图26,示出了描绘发射谐振器的有源电极228的自阻抗相比于图24的无源电极260的归一化半径的图。归一化半径是无源电极260的半径除以环270的外径r。当无源电极260的半径小于外径r时,有源电极228的阻抗受到无源电极260的材料的影响。为了避免这种影响,无源电极260的半径应该大于环270的外径r。
[0168]
现在转到图27,示出了描绘包括有源电极228和248以及无源电极260的系统20的rf效率相比于图24的无源电极260的归一化半径的图。当无源电极260的半径小于环270的外径r时,rf效率显著下降到90%以下。
[0169]
现在转到图28,示出了用于系统20的有源电极228的制造实施方式的平面图。如前所述,有源电极228分别包括以环270和圆盘272形式的两个同心电极。在该制造实施方式中,环270和圆盘272印刷在pcb上。环270的外径r为65mm,并且内径r
in
为50mm。圆盘272的外径r为35mm。pcb的尺寸为180mm乘180mm乘1.6mm。除了安装孔之外,pcb基本上没有其他特征。
[0170]
现在转到图29,示出了与有源电极228一起使用的无源电极274的另一个实施例的透视图。无源电极274被配置为安装在图28描绘的盘272和环270的反面。在该实施例中,无源电极274的形状像打开的盒子,使得盒子的侧面支撑发射谐振器的有源电极228。在该实施例中,盒子的侧面也支撑pcb的周界,使得盘272和环270被提升到无源电极274的最大面之上。无源电极274的最大面是盒子的底部。盒子的深度是5.5mm。盒子的底部是160mm乘160mm。
[0171]
现在转到图30,示出了在不同测试材料上具有和不具有图29的无源电极274的系统20的发射谐振器的电容器52的电容图。测试材料是接地台、木制台、防静电(electrostatic discharge,esd)地板、普通办公室地板、锡(tin)的金属片和聚苯乙烯泡沫塑料(styrofoam)。电容器52的电容用罗德(rohde)&施瓦兹(schwarz)znb 4矢量网络分析仪测量。如前所述,无源电极274向电容器52提供附加电容。当测试材料是高导电性的(例如,接地台、金属片)时,具有和不具有无源电极274的电容器52的电容是相似的。无源电极274防止测试材料之间电容器52的电容变化。电容的标准偏差为:在不具有无源电极274时为1.44pf;在具有无源电极274时为0.46pf。泡沫聚苯乙烯材料是自由空间电容的代表,因为泡沫聚苯乙烯是一种透气的泡沫。
[0172]
虽然已经描述了包括与发射谐振器24的两个有源电极28相邻的无源电极60的系统20,但是本领域技术人员将会理解,其他配置也是可能的。现在转到图31,示出了无线功率传送系统的另一个实施例,并且通常由附图标记320来标识。除非另有说明,否则无线功率传送系统320的元件类似于先前描述的无线功率传送系统20的元件,并且用增加300的相同参考符号来指代。然而,与图1所示的无线功率传送系统20相比,无线功率传送系统320不
包括与发射谐振器324的有源电极328相邻的无源电极60。
[0173]
在该实施例中,接收谐振器342的有源电极348与无源电极380形成接收电容器382。特别地,接收器342包括电连接到负载346的接收谐振器342。接收谐振器342包括接收电容器382和两个感应线圈350。接收电容器382包括两个有源电极348和无源电极380。类似于无线功率传送系统20的无源电极60,无源电极380被配置为包围有源电极348,以至少部分消除影响有源电极348的环境影响。无源电极380为系统提供了附加电容,降低了所需的电感。每个感应线圈350电连接到有源电极348和负载346。
[0174]
无源电极380被配置为包围有源电极348,以至少部分地消除影响有源电极348的环境影响,使得有源电极348拥有大致恒定的环境,而不管位于无源电极380相对于有源电极348的相反侧的实际环境如何,如前所述。无源电极380还向系统320提供附加电容,降低了所需的电感。
[0175]
在该实施例中,无源电极380包括细长元件。细长元件由导电材料形成。细长元件为具有相对主表面的大致矩形平板的形式。无源电极380与有源电极348相邻。无源电极380包围有源电极348。无源电极380和有源电极348形成电容器382。在该实施例中,无源电极380大致平行于有源电极348。有源电极348和无源电极380在大致平行的平面上。
[0176]
在该实施例中,无源电极380不接地。无源电极380是单独的。
[0177]
在该实施例中,无源电极380是非辐射的。
[0178]
在该实施例中,接收谐振器344的组件被配置为在近场中操作。因此,无源电极380被配置为在近场中操作。
[0179]
在该实施例中,无源电极380在电学上较小。当无源电极380的物理长度小于λ/10时,无源电极380在电学上较小。λ是来自电源的源信号的波长。对于由电源26输出的频率为13.56mhz的源信号,λ约为22m。因此,当无源电极380的物理长度小于约2.2m时,无源电极380在电学上较小。
[0180]
接收谐振器344被配置为通过谐振电场耦合从产生的电场中提取电力,如前所述。
[0181]
虽然已经描述了包括与发射谐振器24的两个有源电极28相邻的无源电极60的系统20,但是本领域技术人员将会理解,其他配置也是可能的。现在转到图32,示出了无线功率传送系统的另一个实施例,并且通常由附图标记420来标识。除非另有说明,否则无线功率传送系统420的元件类似于先前描述的无线功率传送系统20的元件,并且用增加400的相同参考符号来指代。
[0182]
在该实施例中,发射谐振器424的有源电极428与第一无源电极460形成电容器452,接收谐振器444的有源电极448与第二无源电极480形成电容器482。特别地,发射器422包括电连接到电源426的发射谐振器424。发射谐振器424包括两个有源电极428和第一无源电极460。每个感应线圈430电连接到有源电极428和电源426。
[0183]
接收器442包括电连接到负载446的接收谐振器444。接收谐振器444包括电容器482和两个感应线圈450。电容器482包括两个有源电极448和第二无源电极480。每个感应线圈450电连接到有源电极448和负载446。
[0184]
类似于无线功率传送系统20的无源电极60,第一无源电极460被配置为包围发射谐振器424的有源电极428,以至少部分消除影响有源电极428的环境影响,第二无源电极480被配置为包围接收谐振器444的有源电极448,以至少部分消除影响有源电极448的环境
影响。第一无源电极460和第二无源电极480也分别为系统420提供了附加电容,降低了所需的电感。
[0185]
第一无源电极460被配置为包围有源电极428,以至少部分地消除影响有源电极428的环境影响,使得有源电极428拥有大致恒定的环境,而不管位于第一无源电极460相对于有源电极428的相反侧的实际环境如何,如前所述。第一无源电极为系统提供了附加电容,降低了所需的电感。类似地,第二无源电极480被配置为包围有源电极448,以至少部分地消除影响接收谐振器444的有源电极448的环境影响,使得有源电极448拥有大致恒定的环境,而不管位于无源电极480相对于有源电极448的相反侧的实际环境如何,如前所述。第二无源电极为系统提供了附加电容,降低了所需的电感。
[0186]
在该实施例中,第一无源电极460和第二无源电极480中的每一个都包括细长元件。细长元件由导电材料形成。细长元件为具有相对主表面的大致矩形平板的形式。第一无源电极460与发射谐振器424的有源电极428相邻。第二无源电极480与接收谐振器444的有源电极448相邻。第一无源电极460包围发射谐振器424的有源电极428。第二无源电极480包围接收谐振器444的有源电极448。第一无源电极460和发射谐振器424的有源电极428形成电容器452。第二无源电极480和接收谐振器444的有源电极448形成电容器482。在该实施例中,第一无源电极460和第二无源电极480大致平行于有源电极428和448。有源电极428和448以及第一无源电极460和第二无源电极480在大致平行的平面中。
[0187]
在该实施例中,第一无源电极460和第二无源电极480不接地。第一无源电极460和第二无源电极480是单独的。
[0188]
在该实施例中,第一无源电极460和第二无源电极480是非辐射的。
[0189]
在该实施例中,发射谐振器424和接收谐振器444的组件被配置为在近场中操作。
[0190]
在该实施例中,第一无源电极460和第二无源电极480在电学上较小。当每个无源电极460和480的物理长度小于λ/10时,第一无源电极460和第二无源电极480在电学上较小。λ是来自电源的源信号的波长。对于频率为13.56mhz的源信号,λ约为22m。因此,当第一无源电极460和第二无源电极480的物理长度小于约2.2m时,第一无源电极460和第二无源电极480在电学上较小。
[0191]
在本实施例中,发射谐振器424的谐振频率为13.56mhz。在该实施例中,每个有源电极428和448是50mm乘200mm。发射谐振器424的有源电极428与接收谐振器444的有源电极448的距离为100mm。第一无源电极460和第二无源电极480中的每一个都是400mm乘600mm。
[0192]
如前所述,与不包括第一无源电极460和第二无源电极480的无线功率传送系统相比,来自第一无源电极460和第二无源电极480的附加电容降低了发射器422和接收器442中的感应线圈430和450在13.56mhz的谐振频率下操作所需的电感。在该实施例中,无线功率传送系统420的感应线圈430和450的电感从43.2μh降低到39.5μh。
[0193]
虽然已经描述了第一无源电极460和第二无源电极480的实施例,但是本领域技术人员将会理解,变化是可能的。现在转到图33,分别示出了第一无源电极460和第二无源电极480的元件以及接收谐振器444的有源电极448的透视图。发射谐振器424的有源电极428存在,但未示出。
[0194]
在该实施例中,有源电极428和428各自具有等于100mm的长度(h)和等于37.5mm的宽度(w)。无源电极460和480各自具有等于110mm的长度(y)和等于110mm的宽度(x)。发射谐
振器424的有源电极428之间的横向间隙(g)等于接收谐振器444的有源电极448之间的横向间隙,并且等于25mm。发射谐振器424的有源电极428和第一无源电极460之间的间隔距离(d1)等于2mm。发射谐振器424的有源电极428和接收谐振器444的有源电极448之间的间隔距离(d)等于20mm。当无源电极460和480存在时,每个谐振器上的电感为12.6μh。系统420的效率为88%。当无源电极460和480不存在时,每个谐振器的电感为12.7μh。
[0195]
在该实施例中,第一无源电极460和第二无源电极480分别进一步包括附着到每个无源电极460和480的边缘和/或沿着每个无源电极460和480的周界的耗散材料。耗散材料在无源电极的与相应有源电极相对的面上附着到相应无源电极。通过杂散电场,无源电极460和480的边缘和拐角可以是高电场强度的源。这些杂散电场可能会造成电磁干扰。在无源电极460和480的边缘上和/或沿着无源电极460和480周界的耗散材料抑制了从无源电极460和480发出的杂散电场。
[0196]
附着到每个无源电极460和480的耗散材料具有10
‑6和10
‑
12
s/m之间的电导率。该电导率范围提供电场能量的理想吸收。低于此范围,感应电流遇到的阻力很小;因此,能量损失很少。高于此范围,电荷感应电流被耗散材料的电阻抑制;因此,只有少量能量被耗散。出于安全和电磁干扰(electro
‑
magnetic interference,emi)的目的,期望抑制杂散电场。耗散材料的示例包括具有碳添加剂的塑料和碳纤维。耗散材料不影响系统420的效率,因为耗散材料分别位于相应无源电极460和480的与发射谐振器424和接收谐振器444的有源电极428和448相对的一侧。
[0197]
在该实施例中,第一耗散材料490附着到第一无源电极460,并且第二耗散材料492附着到第二无源电极480。第一耗散材料490是放置在与第一无源电极460相邻的与发射谐振器424的有源电极428相对的塑料片。第二耗散材料492是放置在与第二无源电极480相邻的与发射谐振器444的有源电极448相对的塑料片。塑料片具有相同的尺寸。每个塑料片的尺寸为121mm(长)
×
121mm(宽)
×
1mm(厚)。
[0198]
现在转到图34至图36,示出了从无线功率系统420发出的电场的等高线图。等高线图是沿着电容器452和482的对角线截取的横截面视图,并且横截面垂直于无源电极460和480。等高线图上的比例单位为dbv/m,并且每个等高线的增量为2.5dbv/m。
[0199]
图34是当第一耗散材料490和第二耗散材料492不存在时从无线功率系统420发出的电场的等高线图。
[0200]
图35是当第一耗散材料490和第二耗散材料492存在并且耗散材料490和492是塑料片时,从无线功率系统420发出的电场的等高线图。
[0201]
图36是当第一耗散材料490和第二耗散材料492存在并且耗散材料490和492是塑料片时,从无线功率系统420发出的电场的等高线图。塑料片的电导率从0(理想绝缘体)增加到10
‑8s/m。在这种电导率下,塑料片变得耗散并且容易吸收rf能量。显然,与图34和图35的等高线图中存在的杂散电场相比,添加耗散塑料片更有效地抑制了杂散电场。
[0202]
虽然已经描述了谐振器的特定实施例,但是本领域技术人员将会理解,变化是可能的。在另一个实施例中,谐振器包括电容器和单个感应线圈。电容器包括两个有源电极和与有源电极相邻的无源电极。无源电极被配置为包围有源电极,以至少部分消除影响有源电极的环境影响。无源电极被配置为向系统提供附加电容。无源电极被配置为降低实现谐振所需的电感。感应线圈电连接到有源电极。在该实施例中,感应线圈位于无源电极相对于
有源电极的相反侧。感应线圈通过一根或多根穿过无源电极中的孔的导线电连接到有源电极。无源电极中的孔大于导线的半径。孔不大于连接感应线圈和有源电极的导线半径的10倍。
[0203]
在另一个实施例中,孔用绝缘材料填充。
[0204]
在另一个实施例中,连接有源电极和感应线圈的导线是绝缘的。孔的大小设置成能容纳连接有源电极和感应线圈的导线周围的绝缘层。
[0205]
在另一个实施例中,连接线圈和有源电极的导线围绕无源电极延伸。
[0206]
虽然已经描述了无线功率传送系统20的电容器52的特定实施例,但是本领域技术人员将会理解,变化是可能的。现在转到图37,示出了电容器494的另一个实施例。通常,电容器494被配置为控制无源电极60和发射谐振器24的有源电极28之间的间隔距离。
[0207]
在该实施例中,如前所述,电容器494包括发射谐振器24的有源电极28和无源电极60;并且电容器494还包括有源电极28附着在其上的衬底496、致动器498和在衬底496和无源电极60之间延伸的两(2)个伸缩支撑件499以及微控制器。
[0208]
衬底496被配置为不影响系统20的发射谐振器24和接收谐振器44之间的无线功率传送。有源电极28附着在衬底496上,并且衬底496在有源电极28之间延伸。每个有源电极28的主表面附着到衬底496上。在该实施例中,衬底496是塑料的。在其他实施例中,衬底496是玻璃纤维、陶瓷和聚苯乙烯泡沫塑料中的一种。在另一个实施例中,衬底496是印刷电路板。衬底496是细长的刚性构件,其至少横跨有源电极28的周界。衬底496具有与无源电极60相似的尺寸。衬底496在x
‑
y轴上平行于无源电极60。x轴和y轴彼此垂直,并且垂直于无源电极60和衬底496主面的法向量。
[0209]
无源电极60与衬底496隔开。在无源电极60和衬底之间延伸的空间内,致动器498在由无源电极60和衬底496限定的x
‑
y轴上的近似位于无源电极60和衬底496的中心点上。致动器498附着到衬底496的主表面和无源电极60的主表面。在该实施例中,致动器498是电机。在另一个实施例中,致动器498是压电装置。
[0210]
两(2)个伸缩支撑件499位于无源电极60和衬底496之间的空间内。每个伸缩支撑件499附着到衬底496的主表面和无源电极60的主表面。伸缩支撑件499通常位于衬底496和无源电极60的相对端。伸缩支撑件499与致动器498等距。伸缩支撑件499被配置为延伸,从而增加无源电极60和发射谐振器24的有源电极28之间的间隔距离,并且被配置为压缩,从而减少无源电极60和发射谐振器24的有源电极28之间的间隔距离。虽然描述了两(2)个伸缩支撑件499,但是本领域技术人员将会理解,可以包括更多。
[0211]
在该实施例中,致动器498的致动由微控制器(未示出)控制。微控制器可通过软件编程来控制致动器498。微控制器位于远离致动器498的位置,并通过常规的通信方法,诸如bluetooth
tm
或wifi
tm
与致动器498通信。
[0212]
在使用中,致动器498被致动以增加无源电极60和有源电极28之间的间隔距离,或者减少无源电极60和有源电极28之间的间隔距离。随着致动器498增加或减少间隔距离,伸缩支撑件499分别延伸或压缩,以使得间隔距离沿着有源电极28和无源电极60的整个跨度均匀地增加或减少。
[0213]
如前所述,致动器498的致动由微控制器控制。在另一个实施例中,致动器498的致动是手动控制的。在另一个实施例中,微控制器接收来自传感器的输入,传感器检测无源电
极60和有源电极28之间的间隔距离和电场强度中的至少一个。
[0214]
如前所述,电容器494被配置为控制无源电极60和发射谐振器24的有源电极28之间的间隔距离。如前所述,减小无源电极60和有源电极28之间的间隔距离减小了由发射谐振器24产生的电场的电势范围,如果保持发射谐振器24和接收谐振器44之间的距离,这降低了功率传送效率。此外,减小无源电极60和有源电极28之间的间隔距离增加了附加到电容器494的电容,并减小了系统20所需的电感。通过改变附加到电容器494上的电容来改变系统20的电容,调谐发射谐振器24的谐振频率。
[0215]
微控制器被编程以控制功率传送效率、由无源电极60提供给系统20的附加电容以及通过改变无源电极60和有源电极28之间的间隔距离对系统20所需电感的减少量,从而可以实现这些参数之间的期望平衡。此外,微控制器可以通过改变间隔距离来控制系统20的电容,从而调谐发射谐振器24的谐振频率。
[0216]
如本领域技术人员将理解的,所讨论的各种无线功率传送系统20、120、320和420可以用于各种不同的应用中。例如,在一个应用中,无线功率传送系统20与给自动车辆的电池充电结合使用。自动车辆用于农业、高尔夫球场维护和家庭监控以及机器人劳动,诸如机器人割草机。在该应用中,发射器22位于土壤或地面上,并用于给自动车辆的电池再充电。发射器22位于土壤或地面上,使得土壤材料或地面材料不位于无源电极60和有源电极28之间。此外,发射器22位于土壤或地面上,使得土壤材料或地面材料不紧邻有源电极28。自动车辆包括接收器42。
[0217]
土壤上的发射器22和自动车辆中的接收器42之间的无线功率传送允许自动车辆在没有用户输入的情况下充电。如前所述,当发射器22位于土壤中或土壤上时,土壤的介电特性会影响发射器22和接收器42之间的功率传送。类似地,当发射器22位于地下时,发射器22和接收器42之间的功率传送可能受到环境影响的影响。将无源电极60定位在与发射谐振器24的有源电极28相邻,与接收器42相对,至少部分消除了影响有源电极28的环境影响,并提供了附加电容,降低了系统所需的电感,如前所述。
[0218]
因此,提供了无源电极的示例应用。自动驾驶汽车的前视图如图38所示。自动车辆通常由附图标记500标识。自动车辆500包括配置为推进车辆500的推进系统、配置为给推进系统供电的功率系统、配置为检测环境信息(例如障碍物、条形码、二维码、颜色)的一系列传感器(触摸传感器、光学传感器等),以及配置为处理来自传感器的信息以便控制推进系统和功率系统来实现(多个)预定目标的控制系统。推进系统包括连接到两个或多个车轮的电机。功率系统包括电连接到电池形式的负载的接收谐振器。
[0219]
本领域技术人员将会理解,推进系统可以包括其他组件,例如但不限于履带和/或致动器。
[0220]
接收谐振器包括电容器和两个感应线圈。电容器包括串联电连接到感应线圈的两个有源电极502。感应线圈电连接到负载。如前所述,接收器被配置为通过无线谐振电场耦合从发射器提取电力。发射器包括电连接到电源的发射谐振器。发射谐振器包括电容器和两个感应线圈。感应线圈电连接到电源。电容器包括两个有源电极504和无源电极506,无源电极506与发射谐振器的有源电极504相邻,与自动车辆500相对。感应线圈串联电连接到有源电极504。发射谐振器被配置为产生电场,以通过谐振电场耦合向接收器传送功率,如前所述。无源电极506被配置为包围有源电极504,以至少部分地消除影响有源电极504的环境
影响,使得有源电极28拥有与土壤条件(或其他衬底)无关的大致恒定的环境,如前所述。如前所述,无源电极506向发射谐振器的电容器提供附加电容。如前所述,无源电极506减少了在谐振频率下谐振所需的电感量。在该实施例中,自动车辆500不包含自动调谐电路,这降低了成本并允许向负载输送更多的功率。
[0221]
在该实施例中,无源电极506不接地。无源电极506是单独的。
[0222]
在该实施例中,无源电极506是非辐射的。
[0223]
在该实施例中,无源电极506在电学上较小。当无源电极506的物理长度小于λ/10时,无源电极506在电学上较小。λ是来自电源的源信号的波长。对于频率为13.56mhz的源信号,λ大约为22m。因此,当无源电极506的物理长度小于约2.2m时,无源电极506在电学上较小。
[0224]
在操作期间,功率通过感应线圈从电源传送到发射谐振器的有源电极504。经由感应线圈从电源发送到有源电极504的功率信号激励发射谐振器,使得发射谐振器产生电场。在该实施例中,产生的电场是近场。在发射谐振器的有源电极504上施加差分电压,这在周围环境中创建电场。当接收谐振器被放置于所产生的电场内并被调谐到发射谐振器的谐振频率时,接收谐振器通过谐振电场耦合从发射谐振器提取功率。然后,所提取的功率从接收谐振器传送到电连接到接收谐振器的负载。虽然发射谐振器可以产生磁场,但是通过磁场耦合传送的功率很少(如果有的话)。
[0225]
现在转到图39,表格示出了当无源电极506存在时,rf效率相比于图38的发射器和接收器之间的功率传送的介电常数和损耗正切(电容率的虚部与实部之比)范围内的介电特性。如图39清楚所示,当无源电极506存在时,rf效率通常是均匀的。此外,在整个介电特性范围内,rf效率的变化小于5%。rf效率的变化很小,使得rf效率的梯度通常不可辨别。介电常数的范围表示各种土壤条件和其他表面,诸如木材、沥青和塑料。
[0226]
现在转到图40,示出了当无源电极506不存在时,rf效率相比于图38的发射器和接收器之间的功率传送的介电常数范围内的介电常数的表格。与图39的表格相比,图40中存在rf效率低于90%的大区域。介电常数的范围表示各种土壤条件和其他表面,如木材和塑料。
[0227]
现在转到图41,表格示出了当无源电极506存在时,为电源供电时看到的阻抗的相位相比于为图38的发射器和接收器之间的功率传送的介电常数和损耗正切(电容率的虚部与实部之比)的范围内的介电特性。如图41清楚所示,当无源电极506存在时,阻抗的相位通常较低(<70
°
)。电源优先看到具有低相位的阻抗,尤其是对于高功率,并且对于高于预定值(例如10)的相位,电源可以自动关闭。介电常数的范围表示各种土壤条件和其他表面,诸如木材、沥青和塑料。
[0228]
现在转到图42,表格示出了当无源电极506不存在时,为电源供电时看到的阻抗的相位相比于为图38的发射器和接收器之间的功率传送的介电常数范围内的介电常数。与图41的表格相比,图42中的大部分介电特性具有相位角大于25
°
的阻抗,使得电源具有不利的阻抗。介电常数的范围表示各种土壤条件和其他表面,诸如木材和塑料。
[0229]
如将理解的,无源电极506确保发射器足够稳健以在各种各样的衬底(诸如不同类型的地板、路面和混凝土)上一致地操作,而不需要将接收谐振器重新调谐到发射谐振器的谐振频率。
[0230]
虽然已经描述了一种应用,但是本领域技术人员将会理解,其他应用也是可能的。无线功率传送系统20、120、320和420可用于除自动车辆之外的其他应用中。例如,无线功率传送系统320可用于uav。现在转到图43至图45,示出了根据本公开的一方面的uav。uav通常被标识为参考符号1000。uav 1000采用前述的无线功率传送系统320。uav 1000包括支撑结构、安装到支撑结构并被配置为提供uav 1000的升力和推力的推进系统、安装到支撑结构并被配置为给推进系统供电的功率系统、以及安装到支撑结构并被配置为控制推进系统和功率系统的控制系统。
[0231]
在该实施例中,支撑结构包括框架1002和四个臂1004。框架1002是刚性的。每个臂1004耦合到框架1002。每个臂1004从框架1002延伸。臂1004彼此间大致等距。本领域技术人员将理解,可以使用更多或更少的臂1004。
[0232]
在该实施例中,推进系统包括四个电机1006和四个螺旋桨1008。每个电机1006附着在臂1004的与框架1002相对的端部。每个电机1006都是无刷式直流(brushless dc,bldc)电机,带有为可变推力控制的电子速度控制器(electronic speed controllers,esc)。每个螺旋桨1008连接到相应电机1006的驱动端。在该实施例中,每个螺旋桨1008是装在圆形外壳中的28cm长的双叶片螺旋桨。
[0233]
功率系统包括电连接到电池1012、外壳1014和接收器板1016的接收谐振器1010。接收谐振器1010和电池1012包含在外壳1014内。电池1012是可充电的。外壳1014是介电材料。外壳1014足够薄,使得它不会显著影响向uav 1000的功率传送。
[0234]
现在转到图45,示出了在外壳1014被部分移除的情况下的uav 1000的视图。接收谐振器1010包括电容器1020和两个感应线圈1022。电容器1020包括两个有源电极1024和与有源电极1024相邻的无源电极1026。无源电极1026被配置为包围有源电极1024。无源电极1026至少部分地消除了影响有源电极1024的环境影响,并为系统提供了附加电容,降低了在期望的谐振频率下使接收谐振器谐振所需的电感。无源电极1026相对于有源电极1024与电场源相对,如下所述。无源电极距离有源电极7.4mm(d1)。感应线圈1022串联电连接到有源电极1024。接收谐振器1010被配置为通过谐振电场耦合从产生的电场中提取功率。在该实施例中,感应线圈1022是铁氧体磁芯电感器。本领域技术人员将理解,其他类型的感应线圈也是可能的。虽然已经示出了两个感应线圈1022,但是本领域技术人员将理解,可以使用一个或多个感应线圈。
[0235]
接收器板1016包括整流器,该整流器将接收谐振器1010通过谐振电场耦合提取的功率转换成调节的dc功率。调节后的dc功率给电池1012充电。接收器板1016还包括无线数据发射器。无线数据发射器将遥测数据无线发送到发射器。遥测数据包括接收谐振器1010处的电压和电流。遥测数据的发送允许跟踪由接收谐振器1010提取的功率。跟踪由接收谐振器1010提取的功率用于保持和维持电池1012的一致充电速率。
[0236]
现在转到图46和图47,uav 1000的电容器1020被单独示出。如前所述,电容器1020包括两个有源电极1024和无源电极1026。在该实施例中,接收谐振器1010的有源电极1024横向隔开。有源电极1024由导电材料形成。虽然描绘了两个有源电极1024,但是本领域技术人员将理解,可以使用更多的电极。
[0237]
每个有源电极1024包括电极板1050和从电极板1050对角延伸的臂1052。臂1052具有中心板1054和两个侧壁1056。每个侧壁1056从中心板1054的纵向侧延伸。每个侧壁1056
从中心板1054以与中心板1054大约135
°
的角度延伸。
[0238]
无源电极1026包围有源电极1024。在该实施例中,无源电极1026大致位于有源电极1024和接收器板1016之间。无源电极1026包括无源电极板1060和壳体1062。无源电极板1060附接到壳体1062。在该实施例中,无源电极板1060是平板。无源电极板1060是金属板。壳体1062的大小设置成包含电池1012。壳体1062是金属壳体。电池1012安装在无源电极1026的壳体1062内。
[0239]
本领域技术人员将会理解,虽然无源电极1026被示为包括平面的无源电极板1060,但是其他配置也是可能的。例如,无源电极板1060可以是非平面的,并且仍然包围uav 1022的有源电极1028。
[0240]
在该实施例中,无源电极1026不接地。无源电极1026是单独的。
[0241]
在该实施例中,无源电极1026是非辐射的。
[0242]
在该实施例中,无源电极1026被配置为在近场中操作。
[0243]
在该实施例中,无源电极1026在电学上较小。当无源电极1026的物理长度小于λ/10时,无源电极1026在电学上较小。λ是来自电源的源信号的波长。对于频率为13.56mhz的源信号,λ约为22m。因此,当无源电极1026的物理长度小于约2.2m时,无源电极1026在电学上较小。
[0244]
无源电极1026被配置为包围有源电极1024,以至少部分地消除影响有源电极1024的环境影响,使得有源电极1024拥有大致恒定的环境,而不管相对于有源电极1024位于无源电极1026的相反侧的实际环境如何,并且向系统提供附加电容,从而降低在期望频率下使系统谐振所需的电感。
[0245]
在该实施例中,无源电极1026和有源电极1024之间的最小间隔距离(ds)等于7.4mm。
[0246]
如前所述,响应于接收谐振器1010遇到的电场,在无源电极1026上感应出表面电荷。对于金属(例如铜和铝)、合金(例如钢和黄铜)和其他导体,如石墨烯或导电织物,电荷耗散时间约为10
‑
19
s。当谐振频率为13.56mhz时,电场的振荡周期约为10
‑9秒。因此,电荷耗散时间比电场的振荡周期小许多个数量级。因此,电荷再分布可以被认为是瞬时的。
[0247]
感应的表面电荷创建其自身的电场,该电场对抗接收谐振器1010遇到的电场,因为带负电的粒子将被吸引到高电势表面上的区域,在该区域它们的存在将抵消平行于表面的电场。因此,作用在无源电极1026表面上的净电场垂直于无源电极1026的表面。因此,由接收谐振器1010提取的电场终止于无源电极1026,并且不绕过无源电极1026。与有源电极1024相对的无源电极1026的导电表面充当无源电极1026产生的电场的边界。因此,无源电极1026相对侧的环境变化不会影响另一侧的电场。
[0248]
如前所述,无源电极1026上感应的表面电荷为uav 1000提供了附加电容。无源电极1026表面的净电场充当uav 1000的能量存储介质。这样,有源电极1024和无源电极1026形成电容器1020,电容器1020的电容大于仅包括有源电极1024的电容器的电容。充当电容器1020的无源电极1026和有源电极1024减少了在谐振频率下谐振所需的电感量。
[0249]
如前所述,在该实施例中,接收谐振器1010的感应线圈1022是铁氧体磁芯电感器。常用的铁氧体电感器很重,有损耗,并且由于铁芯饱和和发热而限制了功率。因此,希望降低uav 1000所需的电感。来自无源电极1026的附加电容降低了每个感应线圈1022所需的电
感。对uav 1000的仿真表明,uav 1000的无源电极1026将uav 1000的电容从4.5pf增加到8.0pf,增加了大约79%。
[0250]
现在转到图48,示出了部分无线功率传送系统。无线功率传送系统包括uav 1010和电场源。uav 1010的电容器1020与电场源在图48中示出。在该实施例中,电场源采取发射器1070的形式。发射器1070包括发射谐振器。发射谐振器包括两个有源电极1072和电连接到有源电极1072的两个感应线圈(未示出)。有源电极1072串联电连接到感应线圈。有源电极横向间隔开。有源电极1072是共面的。有源电极1072是导体。在该实施例中,导体是细长的且为大致矩形的平板。导体由铜箔带制成。虽然描绘了两个有源电极1072,但是本领域技术人员将理解,可以使用更多的有源电极1072。本领域技术人员还将理解,可以使用两个以上的感应线圈。本领域技术人员还将理解,可以使用一个感应线圈。
[0251]
发射谐振器的有源电极1072和感应线圈被配置为谐振并产生电场。接收谐振器1010与发射谐振器的谐振频率一致。接收谐振器1010被配置为通过谐振电场耦合从发射器1070提取功率。虽然发射谐振器也可以产生磁场,但是通过产生的磁场传送很少功率或不传送功率。
[0252]
在该实施例中,发射谐振器的有源电极1072和接收谐振器1010的有源电极1024之间的最小间隔距离(d)等于50mm。
[0253]
在操作期间,功率从电源传送到发射谐振器的有源电极。经由感应线圈从电源发送到发射谐振器的有源电极1072的功率信号激励发射谐振器,使得发射谐振器产生电场。在该实施例中,产生的电场是近场。在发射谐振器的有源电极1072上施加差分电压,这在周围环境中创建电场。当接收谐振器1010被放置在产生的电场内并且与发射谐振器的谐振频率相一致时,接收谐振器1010通过谐振电场耦合从发射器提取功率。然后,提取的功率从接收谐振器1010传送到dc转换器/调节器。然后,提取的功率由dc转换器/调节器进行调节/转换。然后,经调节/转换的功率被用于给电池1012充电。
[0254]
在该实施例中,有源电极1072位于uav 1000的着陆平台(未示出)上。着陆时,发射器的有源电极和接收器的有源电极之间存在50mm的间隙(d)。
[0255]
在该实施例中,控制系统包括与电机和功率系统通信的飞行控制器。飞行控制器封装在框架1002的中心。
[0256]
uav 1000还包括传感器系统,该传感器系统包括至少一个传感器,被配置为检测至少一个参数并向控制系统产生信号。传感器封装在框架1002中。在该实施例中,传感器系统包括至少一个全球定位系统(global positioning system,gps)接收器单元;以及由加速度计、陀螺仪和磁力计组成的惯性测量单元(inertial measurement unit,imu)。
[0257]
在该实施例中,控制系统包括与电机和功率系统通信的飞行控制器。飞行控制器封装在框架1002的中心。
[0258]
虽然已经示出了包括四个电机1006、四个螺旋桨1008和四个臂1004的推进系统,但是本领域技术人员将会理解,可以使用一个或多个电机、螺旋桨和臂。
[0259]
本领域技术人员将认识到,无源电极不必是平面的,例如,无源电极可以是圆柱形的,以符合圆柱形有源电极或消除管道内容物的环境影响。
[0260]
本领域技术人员将认识到,当与环形的有源电极配对时,无源电极可以是环形的。
[0261]
本领域技术人员将认识到,可以使用间隔物和/或支座来保持无源电极和有源电
极之间的间隔。
[0262]
本领域技术人员将认识到,无源电极可以被穿孔,但是无源电极的有效性和增加的电容将随着穿孔的增加而降低。
[0263]
本领域技术人员将会理解,虽然已经描述了具体的尺寸,但是这些都是示例,并且所描述的尺寸可以根据特定的环境而变化。
[0264]
本领域技术人员将会理解,尽管提供了无人驾驶车辆的具体实施例,但是各种其他应用和环境是可能的。
[0265]
虽然上面已经参照附图描述了实施例,但是本领域的技术人员将理解,在不脱离由所附权利要求限定的范围的情况下,可以进行变化和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1