旋转电机的驱动装置的制作方法
旋转电机的驱动装置
相关申请的援引
1.本技术基于2019年1月29日申请的日本专利申请2019
‑
013608号主张其优先权,将该专利申请的全部内容以参照的形式纳入本说明书。
技术领域
2.本公开涉及一种旋转电机的驱动装置。
背景技术:
3.在专利文献1中公开了如下结构:对向独立绕组型电动机输出交流电压的第一逆变器和第二逆变器进行控制,以使独立绕组型电动机进行星形接线等效动作或三角形接线等效动作。在该结构中,在从星形接线等效动作状态向三角形接线等效动作状态转移时,从星形接线等效动作状态开始经由维持第一逆变器的调制系数并逐渐增加第二逆变器的调制系数的中间动作状态,转移至三角形接线等效动作状态。现有技术文献专利文献
4.专利文献1:日本专利特许第4804381号公报
技术实现要素:
5.在专利文献1所记载的技术中,在星形接线等效动作状态下,为了使第二逆变器等效地作为中性点起作用,第二逆变器进行零矢量切换,因此损耗较大,但是即使在中间动作状态下特别是在第二逆变器的调制系数较小且接近星形接线等效动作的区域中,由于第二逆变器进行接近零矢量切换的动作而流过较大的零相电流,因此损耗也较大。因此,在专利文献1所记载的技术中,旋转电机的低~中速旋转区域中的逆变器的损耗较大。
6.本公开提供了一种能够降低旋转电机的低~中速旋转区域中的逆变器的损耗的旋转电机的驱动装置。
7.本公开的第一方式是一种旋转电机的驱动装置,其中,包括:第一逆变器部,上述第一逆变器部分别具有多个第一开关元件,多个上述第一开关元件对应于包含多个相的绕组的旋转电机的各相,并且分别能够使第一高电位点与对应的绕组的一端之间、以及对应的绕组的一端与第一低电位点之间开闭;第二逆变器部,上述第二逆变器部分别具有多个第二开关元件,多个上述第二开关元件对应于上述旋转电机的各相,并且分别能够使第二高电位点与对应的绕组的另一端之间、以及对应的绕组的另一端与第二低电位点之间开闭;第一连接线,上述第一连接线将上述第一高电位点与上述第二高电位点连接;第二连接线,上述第二连接线将上述第一低电位点与上述第二低电位点连接;开闭部,上述开闭部设置于上述第一连接线的中途和上述第二连接线的中途中的至少一方;以及控制部,上述控制部在从星形接线控制切换到开路接线控制的情况下,使上述第一逆变器部的调制系数下降且使上述第二逆变器部的调制系数上升,以使施加于上述旋转电机的绕组的相电压矢量
的变化处于规定范围内,在上述星形接线控制中,将上述开闭部设为开状态且将上述第二逆变器部作为上述旋转电机的绕组的中性点而使上述第一逆变器部的调制系数变化,在上述开路接线控制中,将上述开闭部设为闭状态而将上述第一逆变器部的输出相电压与上述第二逆变器部的输出相电压之间的差分电压施加于上述绕组。
8.根据上述方式,本公开的旋转电机的驱动装置能够降低旋转电机的低~中速旋转区域中的逆变器的损耗。
附图说明
9.参照附图和以下详细的记述,可以更明确本公开的上述目的、其他目的、特征和优点。附图如下所述。图1是实施方式的旋转电机的驱动装置的示意结构图。图2是表示由控制部进行的控制的功能框图。图3是在电动发电机的输出特性上表示第一实施方式的控制区域的线图。图4是表示星形接线控制中的动作的一例的示意图。图5是表示星形接线控制中的逆变器部的驱动波形、向电动发电机的线圈施加的电压波形和相电流波形的线图。图6是表示星形接线控制中的各逆变器部的输出电压矢量和相电压矢量的线图。图7是表示开路接线控制中的动作的一例的示意图。图8a是表示在开路接线控制中与u相线圈对应的电路的动作的示意图。图8b是表示在开路接线控制中与u相线圈对应的电路的动作的示意图。图9是表示开路接线控制(三角形接线控制)中的逆变器部的驱动波形、向电动发电机的线圈施加的电压波形和相电流波形的线图。图10是表示开路接线控制(三角形接线控制)中的各逆变器部的输出电压矢量和相电压矢量的线图。图11是表示在星形接线控制与开路接线控制(h桥控制)之间切换控制时的各逆变器部的输出电压矢量和相电压矢量的线图。图12是表示在从星形接线控制向开路接线控制(三角形接线控制)切换时的逆变器部的驱动波形和相电流波形的线图。图13是在电动发电机的输出特性上表示第二实施方式的控制区域的线图。图14是表示h桥控制中的逆变器部的驱动波形、向电动发电机的线圈施加的电压波形和相电流波形的一例的线图。图15是表示h桥控制中的各逆变器部的输出电压矢量和相电压矢量的线图。图16是表示在星形接线控制与开路接线控制(h桥控制)之间切换控制时的各逆变器部的输出电压矢量和相电压矢量的线图。图17是在电动发电机的输出特性上表示第三实施方式的控制区域的线图。图18是表示在开路接线控制(三角形接线控制)与开路接线控制(h桥控制)之间切换控制时的各逆变器部的输出电压矢量和相电压矢量的线图。图19是在电动发电机的输出特性上表示控制区域的另一例的线图。图20是表示在图19所示的过调制控制区域中进行过调制pwm控制时的逆变器部的
驱动波形的线图。图21是表示在图19所示的过调制控制区域中进行矩形波控制时的逆变器部的驱动波形的线图。图22是表示h桥控制中的逆变器部的驱动波形、向电动发电机的线圈施加的电压波形和相电流波形的另一例的线图。
具体实施方式
10.以下,参照附图,对本公开的实施方式的一例进行详细说明。
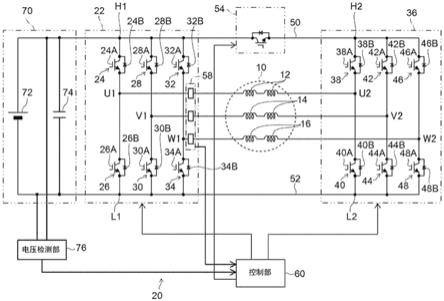
11.(第一实施方式)图1示出了作为旋转电机的一例的电动发电机10、对电动发电机10进行驱动的驱动装置20、以及向驱动装置20供给直流电力的直流电源部70。另外,驱动装置20是旋转电机的驱动装置的一例。
12.电动发电机10例如是装设于电动汽车、混合动力汽车等电动车辆,产生用于对电动车辆的驱动轮(未图示)进行驱动的转矩的所谓“主机电动机”。电动发电机10存在由驱动装置20进行驱动并作为电动机发挥作用的情况(动力运行)、以及由从电动车辆的驱动轮、未图示的发动机传递的驱动力进行驱动以发电的作为发电机发挥作用的情况(再生)。在本实施方式中,以电动发电机10作为电动机发挥作用的情况为中心进行说明。
13.电动发电机10是开放绕组的三相旋转机,具有u相线圈12、v相线圈14和w相线圈16。以下,将u相线圈12、v相线圈14及w相线圈16适当地称为“线圈12~16”。另外,将流过u相线圈12的电流称为u相电流iu,将流过v相线圈14的电流称为v相电流iv,将流过w相线圈16的电流称为w相电流iw。对于流过线圈12~16的电流,将从第一逆变器部22侧流向第二逆变器部36侧的电流设为正,将从第二逆变器部36侧流向第一逆变器部22侧的电流设为负。
14.电动发电机10的相电流iu、iv、iw由电流检测器58检测,上述电流检测器58针对各相分别包括霍尔元件等电流检测元件。另外,电动发电机10的输出轴的旋转电角度θ由旋转角传感器(未图示)检测。
15.驱动装置20包括第一逆变器部22、第二逆变器部36、高电位侧连接线50、低电位侧连接线52、高电位侧连接线开关元件54以及控制部60。
16.第一逆变器部22是对线圈12~16的通电进行切换的三相逆变器。第一逆变器部22包括:对应于线圈12,设置在第一逆变器部22的第一高电位点h1与连接点u1之间的开关元件24;以及设置在连接点u1与第一逆变器部22的第一低电位点l1之间的开关元件26。另外,第一逆变器部22包括:对应于线圈14,设置在第一高电位点h1与连接点v1之间的开关元件28;以及设置在线圈14的一端与连接点v1之间的开关元件30。进而,第一逆变器部22包括:对应于线圈16,设置在第一高电位点h1与连接点w1之间的开关元件32;以及设置在连接点w1与第一低电位点l1之间的开关元件34。另外,第一逆变器部22的开关元件24、26、28、30、32、34是第一开关元件的一例。
17.另外,第二逆变器部36也是对线圈12~16的通电进行切换的三相逆变器。第二逆变器部36包括:对应于线圈12,设置在第二逆变器部36的第二高电位点h2与连接点u2之间的开关元件38;以及设置在连接点u2与第二逆变器部36的第二低电位点l2之间的开关元件40。另外,第二逆变器部36包括:对应于线圈14,设置在第二高电位点h2与连接点v2之间的
开关元件42;以及设置在连接点v2与第二低电位点l2之间的开关元件44。进而,第二逆变器部36包括:对应于线圈16,设置在第二高电位点h2与连接点w2之间的开关元件46;以及设置在连接点w2与第二低电位点l2之间的开关元件48。另外,第二逆变器部36的开关元件38、40、42、44、46、48是第二开关元件的一例。
18.开关元件24包括晶体管24a和二极管24b。开关元件26~34、38~48也同样分别具有晶体管26a~34a、38a~48a以及二极管28b~34b、38b~48b。
19.晶体管24a~34a、38a~48a是igbt(绝缘栅极双极晶体管),由控制部60来控制接通断开。晶体管24a~34a、38a~48a在接通时允许从高电位侧向低电位侧的通电,并且在断开时切断通电。晶体管24a~34a、38a~48a不限于igbt,也可以是mosfet等。
20.二极管24b~34b、38b~48b分别与晶体管24a~34a、38a~48a并联连接,是允许从低电位侧向高电位侧通电的回流二极管。例如,二极管24b~34b、38b~48b可以如mosfet的寄生二极管等那样内置于晶体管24a~34a、38a~48a,也可以外置于晶体管24a~34a、38a~48a。
21.在第一逆变器部22中,在u相的开关元件24、26的连接点u1上连接有u相线圈12的一端,在v相的开关元件28、30的连接点v1上连接有v相线圈14的一端,在w相的开关元件32、34的连接点w1上连接有w相线圈16的一端。
22.另外,在第二逆变器部36中,在u相的开关元件38、40的连接点u2上连接有u相线圈12的另一端,在v相的开关元件42、44的连接点v2上连接有v相线圈14的另一端,在w相的开关元件46、48的连接点w2上连接有w相线圈16的另一端。
23.第一逆变器部22的第一高电位点h1与直流电源部70的电池72的正极连接,高电位侧连接线50将第一逆变器部22的第一高电位点h1与第二逆变器部36的第二高电位点h2连接。另外,第一逆变器部22的第一低电位点l1与电池72的负极连接,低电位侧连接线52将第一逆变器部22的第一低电位点l1和第二逆变器部36的第二低电位点l2连接。高电位侧连接线50是第一连接线的一例,低电位侧连接线52是第二连接线的一例。
24.另外,在高电位侧连接线50的中途设置有对高电位侧连接线50进行开闭的高电位侧连接线开关元件54。高电位侧连接线开关元件54是开闭部的一例。高电位侧连接线开关元件54与控制部60连接,并且通过控制部60对接通断开进行控制。
25.另外,直流电源部70包括连接在第一逆变器部22与电池72之间的平滑用的电容器74。电容器74的两端的直流电压vdc由电压检测部76检测。
26.控制部60与第一逆变器部22、第二逆变器部36、电流检测部58、电压检测部76、高电位侧连接线开关元件54以及未图示的旋转角传感器连接。控制器60包括cpu(central processing unit:中央处理单元)、存储器和非易失性的存储部,并且执行各种运算处理。控制部60的运算处理可以通过利用cpu执行预先存储的程序的软件处理来实现,也可以通过专用电子电路的硬件处理来实现。
27.控制部60对第一逆变器部22和第二逆变器部36进行控制。具体而言,基于电动发电机10的驱动指令值(本实施方式中的角速度指令值ω*),生成对开关元件24~34、38~48的晶体管24a~34a、38a~48a的接通断开进行控制的控制信号。然后,根据所生成的控制信号,生成对晶体管24a~34a、38a~48a的接通断开进行控制的栅极信号并输出。根据控制信号对晶体管24a~34a、38a~48a进行接通断开,由此将电池72的直流电力转换为交流电力,
并且向电动发电机10供给。由此,电动发电机10的驱动经由第一逆变器部22和第二逆变器部36由控制部60控制。
28.接着,对第一实施方式的作用进行说明。在第一实施方式中,控制部60在功能上包括图2所示的微分运算部60a、速度控制部60b、电流指令生成部60c、坐标转换部60d、电流控制部60e、坐标转换部60f以及驱动信号生成部60g、60h。
29.具体而言,微分运算部60a以时间对由旋转角传感器检测的电动发电机10的输出轴的旋转电角度θ进行微分,并且输出角速度ω。速度控制部60b将从微分运算部60a输出的角速度ω与从外部输入的作为电动发电机10的驱动指令值的角速度指令值ω*进行比较,并且根据比较结果来生成转矩指令值trq*并输出。电流指令生成部60c根据由速度控制部60b输出的转矩指令值trq*,生成d相的电流指令值id*和q相的电流指令值iq*并输出。
30.另外,坐标转换部60d基于电动发电机10的旋转电角度θ,将由电流检测部58检测的电动发电机10的相电流iu、iv、iw转换为d相的电流id和q相的电流iq并输出。电流控制部60e将从坐标转换部60d输出的d相的电流id、q相的电流iq与从电流指令生成部60c输出的d相的电流指令值id*、q相的电流指令值iq*进行比较,并且根据比较结果来生成d相的输出电压指令值vd*和q相的输出电压指令值vq*并输出。坐标转换部60f基于电动发电机10的旋转电角度θ,将从电流控制部60e输出的d相的输出电压指令值vd*和q相的输出电压指令值vq*转换为u相的输出电压指令值vu*、v相的输出电压指令值vv*和w相的输出电压指令值vw*并输出。
31.在驱动信号生成部60g输入有表示当前的接线模式是星形接线模式(星形接线控制区域)还是开路接线模式(开路接线控制区域)的接线模式信号。驱动信号生成部60g基于从坐标转换部60f输出的u相的输出电压指令值vu*、v相的输出电压指令值vv*和w相的输出电压指令值vw*,生成对第一逆变器部22的开关元件24~34的接通断开进行控制的第一驱动信号。
32.另外,上述接线模式信号也被输入到驱动信号生成部60h。驱动信号生成部60h基于从坐标转换部60f输出的u相的输出电压指令值vu*、v相的输出电压指令值vv*和w相的输出电压指令值vw*,生成对第二逆变器部36的开关元件38~48的接通断开进行控制的第二驱动信号。
33.由驱动信号生成部60g生成的第一驱动信号供给到第一逆变器部22的开关元件24~34的晶体管24a~34a的栅极,并且对第一逆变器部22的开关元件24~34的接通断开进行控制。另外,由驱动信号生成部60g生成的第二驱动信号供给到第二逆变器部36的开关元件38~48的晶体管38a~48a的栅极,并且对第二逆变器部36的开关元件24~34的接通断开进行控制。由此,通过对各相的线圈12~16施加电压,对电动发电机10进行驱动。
34.在第一实施方式中,如图3所示,电动发电机10的低~中速旋转区域被设为星形接线控制区域,与星形接线控制区域相比更高速的高速旋转区域侧被设为开路接线控制区域,详细而言被设为三角形接线控制区域。
35.在星形接线控制区域中,控制部60进行星形接线控制。即,控制部60继续使高电位侧连接线开关元件54断开。另外,控制部60继续使第二逆变器部36的高电位侧的开关元件38、42、46分别接通,并且继续使低电位侧的开关元件40、44、48分别断开(第一接通断开状态),由此使第二逆变器部36作为电动发电机10的各线圈12~16的中性点进行动作(参照图
4)。
36.然后,控制部60通过pwm控制分别接通断开第一逆变器部22的开关元件24~34,由此对电动发电机10的线圈12~16施加电压来驱动电动发电机10。此外,在转矩指令值trq*随着角速度指令值ω*和电动发电机10的输出轴的角速度ω的相对变化而变化等情况下,控制部60根据转矩指令值trq*的变化等使第一逆变器部22的调制系数α1变化,由此使对线圈12~16施加的电压变化。
37.图5示出了星形接线控制中的逆变器部22、36的驱动波形、向电动发电机10的线圈(在此是u相线圈12)施加的电压波形和相电流波形。
38.另外,图6示出了在星形接线控制中,施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12。另外,相电压矢量u12由第一逆变器部22的输出电压矢量u1与第二逆变器部36的输出电压矢量u2的差分表示,相电压矢量v12由第一逆变器部22的输出电压矢量v1与第二逆变器部36的输出电压矢量v2的差分表示,相电压矢量w12由第一逆变器部22的输出电压矢量w1与第二逆变器部36的输出电压矢量w2的差分表示。
39.在星形接线控制中,由于使第二逆变器部36作为电动发电机10的各线圈12~16的中性点动作,因此,第二逆变器部36的输出电压矢量u2、v2、w2是零矢量。而且,由于通过pwm控制分别使第一逆变器部22的开关元件24~34接通断开,因此,第一逆变器部22的输出电压矢量u1、v1、w1与相电压矢量u12、v12、w12一致。
40.另外,第一逆变器部22的调制系数α1对应于第一逆变器部22的输出电压矢量u1、v1、w1的长度,第二逆变器部36的调制系数α2对应于第二逆变器部36的输出电压矢量u2、v2、w2的长度。
41.另一方面,在开路接线控制区域中,控制部60进行开路接线控制。即,控制部60使高电位侧连接线开关元件54接通(参照图7)。图8a、图8b示出了对与线圈12对应的电路(包括开关元件24、26、38、40的电路)进行开路接线控制时的动作。另外,开路接线有时也称为开放绕组(open
‑
end winding)等。
42.如图8a所示,若使夹着线圈12而位于对角的开关元件24、40(的晶体管24a、40a)接通,则电池72的电压沿正方向施加到线圈12的两端。另外,如图8b所示,若使夹着线圈12而位于对角的开关元件38、26(的晶体管38a、26a)接通,则电池72的电压沿负方向施加到线圈12的两端。通过重复上述状态,对线圈12施加交流电压,并且同样也对线圈14、16施加交流电压。
43.此外,在第一实施方式中,控制部60进行开路接线控制,更详细而言进行三角形接线控制。即,控制部60在三角形接线控制中使第一逆变器部22和第二逆变器部36中的相同相的输出电压矢量的大小相等,并且使相位差为120[deg]。例如,如图10所示,第一逆变器部22的u相的输出电压矢量u1和第二逆变器部36的u相的输出电压矢量u2大小相等,并且相位差为120[deg]。在本实施方式中,电动发电机10为三相,因此,第一逆变器部22和第二逆变器部36中的不同相的切换为同步的三角形接线控制。图9示出了三角形接线控制中的逆变器部22、36的驱动波形、向电动发电机10的线圈(在此是u相线圈12)施加的电压波形和相电流波形。
[0044]
另外,在三角形接线控制中,在转矩指令值trq*随着角速度指令值ω*和电动发电机10的输出轴的角速度ω的相对变化而变化等情况下,控制部60根据转矩指令值trq*的变
化等使第一逆变器部22的调制系数α1和第二逆变器部36的调制系数α2同等地变化,由此使对线圈12~16施加的电压变化。此外,三角形接线控制是第一控制的一例。
[0045]
另外,在本说明书中,使第一逆变器部22的调制系数α1和第二逆变器部36的调制系数α2同等地变化也包括在实际控制时调制系数产生由于制造误差等而引起的程度的差的情况。
[0046]
接着,在第一实施方式中,对在星形接线控制与开路接线控制(三角形接线控制)之间切换控制的情况进行说明。如图3所示,在第一实施方式中,星形接线控制区域和开路接线控制区域(三角形接线控制区域)相邻,在两者的区域之间没有设置进行中间控制的区域。然后,在进行星形接线控制的状态下,例如,在与转矩指令值trq*的变化对应的第一逆变器部22的调制系数α1超过了规定值(作为一例,α1>1)等情况下,控制部60进行从星形接线控制向开路接线控制(三角形接线控制)的切换。
[0047]
即,如图11中箭头a所示,控制部60使第一逆变器部22的调制系数α1不连续(瞬间)地下降且使第二逆变器部36的调制系数α2不连续(瞬间)地上升(使调制系数的变化幅度与调制系数α1同等地变化),以使在从星形接线控制向开路接线控制(三角形接线控制)切换的前后,施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。更详细而言,控制成使得切换控制后的第一逆变器部22的输出电压矢量与第二逆变器部36的输出电压矢量的大小相等,并且相位差为120[deg]。
[0048]
另外,在本说明书中,使相电压矢量u12、v12、w12的变化处于规定范围内意味着在随着转矩指令值trq*等的变化而切换控制的情况下,将相电压矢量u12、v12、w12的变化抑制到与转矩指令值trq*等的变化对应的相电压矢量的变化量δu12、δv12、δw12以内。
[0049]
这样,使在切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,作为示例,如图12所示,能够从星形接线控制瞬时且平滑地切换到开路接线控制(三角接线控制)。
[0050]
另外,控制部60在进行开路接线控制(三角形接线控制)的状态下,例如在与转矩指令值trq*的变化对应的调制系数α1、α2小于规定值等情况下,进行从开路接线控制(三角形接线控制)向星形接线控制的切换。即,如图11中箭头b所示,控制部60使第一逆变器部22的调制系数α1不连续(瞬间)地上升且使第二逆变器部36的调制系数α2不连续(瞬间)地下降至0(使调制系数的变化幅度与调制系数α1同等地变化),以使在从开路接线控制(三角形接线控制)向星形接线控制切换的前后,施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。
[0051]
这样,使在从开路接线控制(三角形接线控制)向星形接线控制切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,能够从开路接线控制(三角接线控制)瞬时且平滑地切换到星形接线控制。
[0052]
如上所述,在第一实施方式中,第一逆变器部22分别包括多个开关元件24~34,多个上述开关元件24~34对应于包括多相的线圈12、14、16的电动发电机10的各相,并且能够分别使第一高电位点h1与对应的线圈的一端之间、以及对应的线圈的一端与第一低电位点
l1之间开闭。另外,第二逆变器部36分别包括多个开关元件38~48,多个上述开关元件38~48对应于电动发电机10的各相,并且能够分别使第二高电位点h2与对应的线圈的另一端之间、以及对应的线圈的另一端与第二低电位点l2之间开闭。另外,高电位侧连接线50将第一高电位点h1与第二高电位点h2连接,低电位侧连接线52将第一低电位点l1与第二低电位点l2连接,高电位侧连接线开关元件54设置于高电位侧连接线50的中途。然后,控制部60在从星形接线控制切换到开路接线控制的情况下,使第一逆变器部22的调制系数α1下降且使第二逆变器部36的调制系数α2上升,以使施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,在上述星形接线控制中,将高电位侧连接线开关元件54设为断开状态且将上述第二逆变器部36作为电动发电机10的线圈12~16的中性点而使第一逆变器部22的调制系数α1变化,在上述开路接线控制中,将高电位侧连接线开关元件54设为接通状态而将上述第一逆变器部22的输出相电压与上述第二逆变器部36的输出相电压之间的差分电压施加于线圈12~16。
[0053]
由此,在从星形接线控制切换到开路接线控制时,第二逆变器部36不会进行零矢量切换、或者第二逆变器部36不会进行接近零矢量切换的动作,因此,能够抑制较大的零相电流的流动,并且能够降低电动发电机10的低~中速旋转区域中的逆变器部22、36的损耗。因此,在将电动发电机10用作电动车辆的驱动源的方式中,能够提高电动车辆的常用区域内的电力效率。
[0054]
另外,在第一实施方式中,在从开路接线控制切换到星形接线控制的情况下,控制部60使第一逆变器部22的调制系数α1上升且将第二逆变器部36的调制系数α2设为0,以使施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。由此,即使在从开路接线控制切换到星形接线控制时,第二逆变器部36也不会进行零矢量切换、或者不会进行接近零矢量切换的动作,因此,能够抑制较大的零相电流的流动,并且能够降低电动发电机10的低~中速旋转区域中的逆变器部22、36的损耗。因此,在将电动发电机10用作电动车辆的驱动源的方式中,能够提高电动车辆的常用区域内的电力效率。
[0055]
另外,在第一实施方式中,在星形接线控制与开路接线控制之间切换控制的情况下,控制部60使第一逆变器部22的调制系数α1和第二逆变器部36的调制系数α2的变化幅度同等地变化,以使施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。由此,同在第一逆变器部22的调制系数α1与第二逆变器部36的调制系数α2中产生差的同时使调制系数α1、α2变化的方式相比,能够抑制零相电流,并且能够降低由于零相电流引起的损耗。
[0056]
此外,在第一实施方式中,在星形接线控制与开路接线控制之间切换控制的情况下,控制部60使第一逆变器部22的调制系数α1和第二逆变器部36的调制系数α2不连续地变化。由此,即使在特意地使电动发电机10的输出轴的旋转速度或转矩大幅变化的条件下,也能够在不设置用于在星形接线控制与开路接线控制之间切换控制的特别的转移期间的情况下瞬时地切换控制。因此,确保了切换控制的前后的电流的连续性,能够抑制电动发电机10的转矩随着控制的切换而超出意图地急剧地变动。
[0057]
另外,在第一实施方式中,在星形接线控制中,控制部60继续使第二逆变器部36的第二高电位点h2侧的开关元件38、42、46以及第二低电位点l2侧的开关元件40、44、48中的、与设置有高电位侧连接线开关元件54的高电位侧连接线50对应的开关元件38、42、46处于
闭状态。由此,与以使第二逆变器部36等效地作为中性点起作用的方式使第二逆变器部36的开关元件38~48接通断开的方式相比,能够降低星接线控制中的第二逆变器部36的开关损耗。
[0058]
另外,在第一实施方式中,控制部60在开路接线控制中进行第一控制(三角形接线控制),以使第一逆变器部22和第二逆变器部36的相同相的输出电压的相位差为120[deg]。由于在三角形接线控制中,能施加于电动发电机10的线圈12~16的最大有效电压是星形接线控制的√3倍,因此,通过进行作为开路接线控制的三角形接线控制,能够扩大能使电动发电机10以高速旋转而驱动的范围。另外,与h桥控制相比,三角形接线控制不会在第一逆变器部22和第二逆变器36的电周期的三阶的中性点电压中产生差,因此,能够抑制由于逆变器部22、36的中性点电压的变动而引起的谐波电流,并且能够避免与之相伴的损耗增加。
[0059]
(第二实施方式)接着,对本公开的第二实施方式进行说明。另外,对与第一实施方式相同的部分标注相同的符号,并且省略说明。
[0060]
在第二实施方式中,如图13所示,电动发电机10的低~中速旋转区域被设为星形接线控制区域,与星形接线控制区域相比更高速的高速旋转区域侧被设为开路接线控制区域,详细而言被设为h桥控制区域。在星形接线控制区域中,控制部60所进行的星形接线控制如在第一实施方式中说明的那样。
[0061]
另一方面,在第二实施方式中,控制部60进行作为开路接线控制的控制,更详细地进行h桥控制。即,控制部60在h桥控制中使第一逆变器部22和第二逆变器部36中的相同相的输出电压矢量的大小相等,并且使相位差为180[deg]。例如,如图15所示,第一逆变器部22的u相的输出电压矢量u1和第二逆变器部36的u相的输出电压矢量u2大小相等,并且相位差为180[deg]。图14示出了h桥控制中的逆变器部22、36的驱动波形、向电动发电机10的线圈(在此是u相线圈12)施加的电压波形和相电流波形。
[0062]
另外,在h桥控制中,在转矩指令值trq*随着角速度指令值ω*和电动发电机10的输出轴的角速度ω的相对变化而变化等情况下,控制部60根据转矩指令值trq*的变化等使第一逆变器部22的调制系数α1和第二逆变器部36的调制系数α2同等地变化,由此使对线圈12~16施加的电压变化。此外,h桥控制是第二控制的一例。
[0063]
接着,在第二实施方式中,对在星形接线控制与开路接线控制(h桥控制)之间切换控制的情况进行说明。如图13所示,在第二实施方式中,星形接线控制区域和开路接线控制区域(h桥控制区域)相邻,在两者的区域之间没有设置进行中间控制的区域。然后,在进行星形接线控制的状态下,例如,在与转矩指令值trq*的变化对应的第一逆变器部22的调制系数α1超过了规定值(作为一例,α1>1)等情况下,控制部60进行从星形接线控制向开路接线控制(h桥控制)的切换。
[0064]
即,如图16中箭头c所示,控制部60使第一逆变器部22的调制系数α1不连续(瞬间)地下降且使第二逆变器部36的调制系数α2不连续(瞬间)地上升(使调制系数的变化幅度与调制系数α1同等地变化),以使在从星形接线控制向开路接线控制(h桥控制)切换的前后,施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。更详细而言,控制成使得从星形接线控制切换到开路接线控制(h桥控制)后的第一逆变器部22的输出电压矢量与第二逆变器部36的输出电压矢量的大小相等,并且相位差为180
[deg]。
[0065]
这样,使在从星形接线控制向开路接线控制(h桥控制)切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,能够从星形接线控制瞬时且平滑地切换到开路接线控制(h桥控制)。
[0066]
另外,控制部60在进行开路接线控制(h桥控制)的状态下,例如在与转矩指令值trq*的变化对应的调制系数α1、α2小于规定值等情况下,进行从开路接线控制(h桥控制)向星形接线控制的切换。即,如图16中箭头d所示,控制部60使第一逆变器部22的调制系数α1不连续(瞬间)地上升且使第二逆变器部36的调制系数α2不连续(瞬间)地下降而成为0(使调制系数的变化幅度与调制系数α1同等地变化),以使在从开路接线控制(h桥控制)向星形接线控制切换的前后,施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内。
[0067]
这样,使在从开路接线控制(h桥控制)向星形接线控制切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,能够从开路接线控制(h桥控制)瞬时且平滑地切换到星形接线控制。
[0068]
如上所述,在第二实施方式中,控制部60在开路接线控制中进行第二控制(h桥控制),以使第一逆变器部22和第二逆变器部36的相同相的输出电压的相位差为180[deg]。由于在h桥控制中,能施加于电动发电机10的线圈12~16的最大有效电压是星形接线控制的2倍,因此,通过进行作为开路接线控制的h桥控制,能够扩大能使电动发电机10以高速旋转而驱动的范围。另外,由于能够独立地控制各相的电流,因此,能够提高驱动装置20的冗余性(抗故障性)。
[0069]
(第三实施方式)接着,对本公开的第三实施方式进行说明。另外,对于与第一实施方式和第二实施方式相同的部分标注相同的符号,并且省略说明。
[0070]
在第三实施方式中,如图17所示,电动发电机10的低~中速旋转区域被设为星形接线控制区域,与星形接线控制区域相比更高速的高速旋转区域侧被设为开路接线控制区域,详细而言被设为三角形接线控制区域,与星形接线控制区域相比更高速的高速旋转区域侧被设为开路接线控制区域,详细而言被设为h桥控制区域。星形接线控制区域中的星形接线控制和开路接线控制区域(三角形接线控制区域)中的三角形接线控制如第一实施方式中所说明的那样,开路接线控制区域(h桥控制区域)中的h桥控制如第二实施方式中所说明的那样。
[0071]
接着,在第三实施方式中,对在开路接线控制(三角形接线控制)与开路接线控制(h桥控制)之间切换控制的情况进行说明。另外,在星形接线控制与开路接线控制(三角形接线控制)之间切换控制的情况如在第一实施方式中说明的那样。
[0072]
如图13所示,在该第三实施方式中,开路接线控制区域(三角形接线控制区域)与开路接线控制区域(h桥控制区域)相邻,在两者的区域之间没有设置进行中间控制的区域。
而且,控制部60在进行开路接线控制(三角形接线控制)的状态下,例如在与转矩指令值trq*的变化对应的调制系数α1、α2超过了规定值等情况下,进行从开路接线控制(三角形接线控制)向开路接线控制(h桥控制)的切换。
[0073]
即,如图18中箭头e所示,控制部60对第一逆变器部22的输出电压矢量和第二逆变器部36的输出电压矢量的相位进行控制,以使从开路接线控制(三角形接线控制)向开路接线控制(h桥控制)切换控制的前后的施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,并且控制切换后的第一逆变器部22的输出电压矢量与第二逆变器部36的输出电压矢量之间的相位差为180[deg]。
[0074]
这样,使在从开路接线控制(三角形接线控制)向开路接线控制(h桥控制)切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,能够从开路接线控制(三角接线控制)瞬时且平滑地切换到开路接线控制(h桥控制)。
[0075]
另外,控制部60在进行开路接线控制(h桥控制)的状态下,例如在与转矩指令值trq*的变化对应的调制系数α1、α2小于规定值等情况下,进行从开路接线控制(h桥控制)向开路接线控制(三角形接线控制)的切换。即,如图18中箭头f所示,控制部60对第一逆变器部22的输出电压矢量和第二逆变器部36的输出电压矢量的相位进行控制,以使从开路接线控制(h桥控制)向开路接线控制(三角形接线控制)切换控制的前后的施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,并且控制切换后的第一逆变器部22的输出电压矢量与第二逆变器部36的输出电压矢量之间的相位差为120[deg]。
[0076]
这样,使在从开路接线控制(h桥控制)向开路接线控制(三角形接线控制)切换控制的前后施加于电动发电机10的线圈12~16的相电压矢量u12、v12、w12的变化处于规定范围内,由此使施加于电动发电机10的绕组的有效电压的变化处于规定范围内。由此,不会产生电动发电机10的转矩的不希望的急剧变动等,能够从开路接线控制(h桥控制)瞬时且平滑地切换到开路接线控制(三角形接线控制)。
[0077]
另外,在上述的星形接线控制区域中,对通过pwm控制使第一逆变器部22的开关元件24~34接通断开的方式进行了说明,但不限于此。例如,如图19所示,也可以是将星形接线控制区域向调制系数大于1的高速旋转侧扩大,并且将扩大后的星形接线控制区域内划分为正弦波pwm控制区域与调制系数大于1的过调制控制区域,在过调制控制区域中,通过过调制pwm控制或矩形波控制来接通断开第一逆变器部22的开关元件24~34。
[0078]
图20示出了在过调制控制区域中进行过调制pwm控制时的逆变器部22、36的驱动波形,图21示出了在过调制控制区域中进行矩形波控制时的逆变器部22、36的驱动波形。在星形接线控制区域内的过调制控制区域中,由于第一逆变器部22的开关元件24~34的开关次数减少,因此,能够降低电动发电机10的中速旋转区域中的第一逆变器部22的切换损耗。
[0079]
另外,作为h桥控制的一例,图14示出了由逆变器部22、36均等地进行切换的方式,但本公开不限于此,也可以是在利用逆变器部22、36中的一个进行pwm开关的期间对连接到同一绕组的另一个逆变器部的开关元件的开闭状态进行固定。作为一例,在图22中,作为h桥控制,示出了利用第一逆变器部22进行pwm开关,利用第二逆变器部36对开关元件的开闭状态进行固定的方式中的逆变器部22、36的驱动波形、向电动发电机10的线圈(在此是u相
线圈12)施加的电压波形和相电流波形的一例。由此,由于减少逆变器部中的切换次数,因此能够降低逆变器部的切换损耗,并且也能够特意地使h桥控制中的发热量偏移到逆变器部22、36中的一个。
[0080]
另外,在上述中,对仅在高电位侧连接线50和低电位侧连接线52中的高电位侧连接线50上设置有高电位侧连接线开关元件54的方式进行了说明,但本公开不限于此。例如,虽然省略了图示,但是也可以省略高电位侧连接线开关元件54,仅在低电位侧连接线52上设置低电位侧连接线开关元件。在这种情况下,使第二逆变器部36作为电动发电机10的各线圈12~16的中性点进行动作能够通过使继续使第二逆变器部36的高电位侧的开关元件38、42、46分别断开,并且继续使低电位侧的开关元件40、44、48分别接通(第二接通断开状态)来实现。低电位侧连接线开关元件也是开闭部的一例。
[0081]
另外,连接线开关元件也可以设置在连接线50、52的双方上,在这种情况下,使第二逆变器部36作为电动发电机10的各线圈12~16的中性点进行动作能够通过第一接通断开状态或第二接通断开状态来实现。另外,例如,根据开关元件38、42、46和开关元件40、44、48的热学上的状况,可以适当地对第一接通断开状态和第二接通断开状态进行更换,也可以继续使第二逆变器部36的所有开关元件38~48分别接通。
[0082]
另外,旋转电机的相数也可以是三相以外的相数。一般而言,三角形接线是仅限于三相旋转电机的称呼,但是本公开不限于三相,例如也适用于五相或六相旋转电机。另外,不仅适用于动力运行,也适用于再生。另外,旋转电机的种类可以是同步机也可以是感应机。
[0083]
虽然基于实施例对本公开进行了记述,但是应当理解为本公开并不限定于上述实施例、结构。本公开也包含各种各样的变形例、等同范围内的变形。除此之外,各种各样的组合、方式、进一步包含有仅一个要素、一个以上或一个以下的其他组合、方式也属于本公开的范畴、思想范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1