极性判断方法、判断装置和电机控制系统与流程
1.本发明涉及电机技术领域,具体而言,涉及一种极性判断方法、判断装置、电机控制系统和计算机可读存储介质。
背景技术:
2.基于高频注入的电机低速无位置控制方法,由于其实现简单,成本低等优势,具有广泛的应用前景。通过向定子绕组注入高频载波信号,进而提取与凸极位置相关的电流响应信号,再利用位置观测器,从而得到估计的转子位置信息。而基于高频注入的位置观测器都有可能收敛至n或s极,故在初始位置辨识时,需要进行极性判断。
3.极性判断的主要思想是,通过在估算直轴注入正负脉冲,然后通过比较电流峰值,进而判断出n/s极。若估算直轴为真实直轴,则正脉冲时,为增磁过程,故电流峰值小于其加负脉冲时,反之亦然。极性判断的主要参数选择如电压幅值,持续时间等极为重要。
4.而在小容值母线电容控制系统中,电网电压经整流后用于储能的大容值电解电容被小容值的电容取代,使得电容两端的母线电压同时受电网电压和负载的影响。一方面,母线电压将以电网电压二倍频脉动;另一方面,母线电压将随负载变化波动,负载越大母线电压跌落越大。当负载较大、母线电压较低,特别是母线电压将不足以提供控制电机所需的控制电压时,会造成电机电流难以良好地动态跟随电流指令。
5.在永磁无刷电机小容值母线电容控制系统中,使用高频注入初始位置辨识进行极性判断时,向估算直轴注入正负脉冲的过程中,母线电压会出现跌落甚至会不足以提供脉冲注入所需的控制电压,则通过电流反馈将无法准确地进行极性判断。
技术实现要素:
6.本发明旨在至少解决现有技术或相关技术中存在的技术问题之一。
7.为此,本发明的一个方面在于提出了一种极性判断方法。
8.本发明的另一个方面在于提出了一种极性判断装置。
9.本发明的再一个方面在于提出了一种电机控制系统。
10.本发明的又一个方面在于提出了一种计算机可读存储介质。
11.有鉴于此,根据本发明的一个方面,提出了一种极性判断方法,用于确定电机的转子极性,该极性判断方法包括:向电机的估算直轴注入至多两组脉冲信号,至多两组脉冲信号中的每组脉冲信号均包括正脉冲信号和负脉冲信号;获取估算直轴的正向反馈电流峰值和负向反馈电流峰值;将正向反馈电流峰值的绝对值和负向反馈电流峰值的绝对值进行比较;根据比较结果确定电机的转子极性。
12.本发明提供的极性判断方法,针对在小容值母线电容控制器高频注入极性判断过程中,通过一组或者两组正负脉冲信号注入,便可避免母线电压跌落甚至不足以提供脉冲注入所需的控制电压,导致通过电流反馈无法进行极性判断的情况,也即在母线电压足以提供脉冲注入所需的控制电压的前提下,通过电流反馈峰值进行极性判断,从而在不增加
现有控制器系统成本的前提下,可以准确地实现永磁同步电机小容值母线电容控制器的高频注入极性判断,精度较高,方法简单易实现。
13.可以理解的,在完成一组正负脉冲信号注入后,如果未出现母线电压跌落甚至不足以提供脉冲注入所需的控制电压的情况,则仅需要一次正负脉冲注入就可以实现电机转子初始位置辨识的极性判断;如果出现母线电压跌落甚至不足以提供脉冲注入所需的控制电压的情况,则再注入一组正负脉冲,以确保通过电流反馈峰值进行极性判断。
14.此外,小容值母线电容控制器所采用的母线电容,其容值取值范围小于或等于10uf,但不限于此。
15.根据本发明的上述极性判断方法,还可以具有以下技术特征:
16.在上述技术方案中,至多两组脉冲信号中的每组脉冲信号均为脉冲电压,且每组脉冲电压中正脉冲电压的幅值与注入时间的乘积与负脉冲电压的幅值与注入时间的乘积相等,且在开始注入负脉冲电压的时刻,估算直轴的正向反馈电流已恢复为零。
17.在该技术方案中,通过每组脉冲电压中正脉冲电压的幅值与注入时间的乘积与负脉冲电压的幅值与注入时间的乘积相等,以保证正负脉冲伏秒面积平衡,进而能够准确地通过电流反馈峰值进行极性判断。此外,在负脉冲的注入时刻要确保正脉冲的正向电流反馈已经恢复到零,以保证注入正负脉冲的初始点相同,从而确保极性判断的准确性。
18.在上述任一技术方案中,至多两组脉冲信号包括第一组脉冲电压和第二组脉冲电压,向电机的估算直轴注入至多两组脉冲信号的步骤,具体包括:在注入第一组脉冲电压的过程中,检测母线电压,将母线电压与临界电压阈值进行比较;基于母线电压小于或等于临界电压阈值的情况,停止注入当前脉冲电压,记录当前脉冲电压的持续时间,其中,当前脉冲电压包括第一组脉冲电压中的正脉冲电压和/或负脉冲电压;根据第一组脉冲电压中的正脉冲电压和/或负脉冲电压的持续时间,更新第二组脉冲电压的注入时间,并在第一组脉冲电压注入完毕后,注入更新后的第二组脉冲电压。
19.在该技术方案中,在注入第一组脉冲电压的过程中,实时检测母线电压或者按照一定时间间隔检测母线电压,通过母线电压与临界电压阈值的比较,判断是否需要进行第二组正负脉冲电压的注入。如果需要注入第二组脉冲电压,则根据第一组脉冲电压中的正脉冲电压和/或负脉冲电压的持续时间,来更新第二组脉冲电压的注入时间。负向电流反馈峰值具体而言,若在注入正脉冲电压过程中母线电压跌落至临界电压阈值,则停止正脉冲电压的注入,并记录注入正脉冲电压的持续时间;若在注入负脉冲电压过程中母线电压跌落至临界电压阈值,则停止负脉冲电压的注入,并记录注入负脉冲的持续时间;然后根据所记录的正脉冲电压的持续时间和/或负脉冲电压的持续时间对第二组脉冲电压的注入时间进行更新,并在第二组脉冲电压注入完毕后,根据正向电流反馈峰值绝对值和负向电流反馈峰值绝对值的比较得到极性判断结果;如果不需要注入第二组脉冲电压,则直接根据正向电流反馈峰值绝对值和负向电流反馈峰值绝对值的比较得到极性判断结果。
20.可以理解的,当注入正脉冲过程中母线电压跌落至临界电压阈值,或者当注入负脉冲过程中母线电压跌落至临界电压阈值,甚至在正负脉冲注入过程中都发生了母线电压跌落至临界电压阈值的情况,则需要进行第二组正负脉冲注入,并根据第一组正负脉冲注入的结果(即第一组脉冲电压中的正脉冲电压和/或负脉冲电压的持续时间)更新脉冲注入时间。
21.此外,在完成一次正负脉冲注入之后,若母线电压始终高于临界电压阈值,则可以直接获得估算直轴正向和负向电流反馈峰值的绝对值,并进行判断,在这种情况下,仅需要一次正负脉冲注入就可以实现初始位置辨识的极性判断。
22.本发明提供的极性判断方法,较有电解电容控制器方案只需另外确定临界电压阈值即可,方法简单易实现。
23.在上述任一技术方案中,更新第二组脉冲电压的注入时间的步骤,具体包括:基于u
p
与t
pc
的乘积等于u
n
与t
nc
的乘积,则无需更新第二组脉冲电压的注入时间;基于u
p
与t
pc
的乘积大于u
n
与t
nc
的乘积,则第二组脉冲电压中的正脉冲电压的注入时间t
p
等于u
n
与t
nc
的乘积除以u
p
、负脉冲电压的注入时间t
n
等于t
nc
;基于u
p
与t
pc
的乘积小于u
n
与t
nc
的乘积,则第二组脉冲电压中的正脉冲电压的注入时间t
p
等于t
pc
、负脉冲电压的注入时间t
n
等于u
p
与t
pc
的乘积除以u
n
;其中,u
p
为第一组脉冲电压中的正脉冲电压的幅值,t
pc
为第一组脉冲电压中的正脉冲电压的持续时间,u
n
为第一组脉冲电压中的负脉冲电压的幅值,t
nc
为第一组脉冲电压中的负脉冲电压的持续时间。
24.在该技术方案中,第二组正负脉冲电压的注入时间由第一组脉冲电压注入时u
p
t
pc
(u
p
与t
pc
的乘积)和u
n
t
nc
(u
n
与t
nc
的乘积)中的较小值决定的。如果u
p
t
pc
大于u
n
t
nc
,则第二组正脉冲的注入时间t
p
=u
n
t
nc
/u
p
,第二组负脉冲的注入时间t
n
=t
nc
;反之,如果u
p
t
pc
小于u
n
t
nc
,则第二组正脉冲的注入时间t
p
=t
pc
,第二组负脉冲的注入时间t
n
=u
p
t
pc
/u
n
。在第二组正负脉冲注入后,则可以获得估算直轴正向和负向电流反馈峰值的绝对值,并判断得到极性判断结果。
25.在上述任一技术方案中,临界电压阈值大于或等于估算直轴的反馈电流的斜率开始减小的时刻所对应的母线电压。
26.在该技术方案中,首先确定估算直轴的反馈电流的斜率开始减小的拐点所对应的母线电压值,以此确定临界电压阈值,临界电压阈值需大于或等于该母线电压值,一旦临界电压阈值小于该拐点所对应的母线电压值,继续注入正负脉冲,就可能出现母线电压跌落过快甚至将不足以提供控制电机所需的控制电压,而系统却误以为母线电压始终未跌落,从而造成误判。
27.在上述任一技术方案中,根据比较结果确定电机的转子极性的步骤,具体包括:基于正向反馈电流峰值的绝对值小于负向反馈电流峰值的绝对值的情况,估算直轴为真实直轴;基于正向反馈电流峰值的绝对值大于或等于负向反馈电流峰值的绝对值的情况,则真实直轴与估算直轴的方向相反。
28.在该技术方案中,当正向反馈电流峰值的绝对值小于负向反馈电流峰值的绝对值时,估算直轴为真实直轴,即电机转子的初始位置所指向的磁极方向与估算直轴的正方向一致,而当正向反馈电流峰值的绝对值大于或等于负向反馈电流峰值的绝对值时,则说明估算直轴与真实直轴反向相反,即电机转子的初始位置所指向的磁极方向与估算直轴的正方向相反。
29.根据本发明的另一个方面,提出了一种极性判断装置,包括:存储器,存储器存储有计算机程序;处理器,处理器执行计算机程序时实现如上述任一技术方案的极性判断方法。
30.本发明提供的极性判断装置,计算机程序被处理器执行时实现如上述任一技术方
案的极性判断方法的步骤,因此该极性判断装置包括上述任一技术方案的极性判断方法的全部有益效果。
31.根据本发明的再一个方面,提出了一种电机控制系统,包括:存储器,存储器存储有计算机程序;处理器,处理器执行计算机程序时实现如上述任一技术方案的极性判断方法。
32.本发明提供的电机控制系统,计算机程序被处理器执行时实现如上述任一技术方案的极性判断方法的步骤,因此该电机控制系统包括上述任一技术方案的极性判断方法的全部有益效果。
33.在上述技术方案中,还包括:母线电容控制装置,用于向电机的估算直轴注入至多两组脉冲信号。
34.在上述任一技术方案中,母线电容控制装置所采用的母线电容的容值范围为:大于0,小于或等于10uf。
35.在该技术方案中,在确定第一组正负脉冲电压的幅值后,通过小容值母线电容控制器向估算直轴注入正负脉冲电压,注入正负脉冲电压的过程中,采集母线电压,包括实时采集或者固定时间间隔的采集母线电压,通过母线电压与临界电压阈值的比较,判断是否需要再次进行正负脉冲电压的注入以及更新脉冲正负脉冲电压的注入时间;最后根据正向电流反馈峰值绝对值和负向电流反馈峰值绝对值的比较得到极性判断结果。本发明提供的电机控制系统,针对在小容值母线电容控制器高频注入极性判断过程中母线跌落的情况,通过一次或者两次正负脉冲注入,可以准确地实现永磁同步电机小容值母线电容控制器的高频注入极性判断。
36.根据本发明的又一个方面,提出了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述任一技术方案的极性判断方法。
37.本发明提供的计算机可读存储介质,计算机程序被处理器执行时实现如上述任一技术方案的极性判断方法的步骤,因此该计算机可读存储介质包括上述任一技术方案的极性判断方法的全部有益效果。
38.本发明的附加方面和优点将在下面的描述部分中变得明显,或通过本发明的实践了解到。
附图说明
39.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
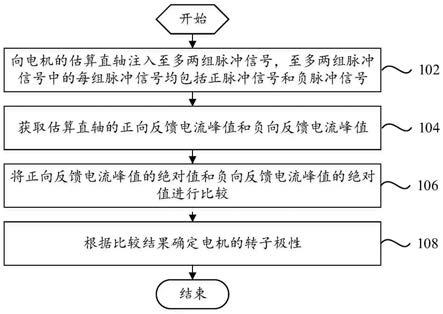
40.图1示出了本发明的第一个实施例的极性判断方法的流程示意图;
41.图2示出了本发明的第二个实施例的极性判断方法的流程示意图;
42.图3示出了本发明实施例的更新第二组脉冲电压的注入时间的方法的流程示意图;
43.图4示出了本发明实施例的注入正脉冲电压的方法的流程示意图;
44.图5示出了本发明实施例的注入负脉冲电压的方法的流程示意图;
45.图6示出了本发明的一个具体实施例的母线电压、d轴指令电压和d轴电流反馈示意图;
46.图7示出了本发明的一个具体实施例的高频注入d轴指令电压示意图;
47.图8示出了本发明的一个具体实施例的正脉冲注入逻辑示意图;
48.图9示出了本发明的一个具体实施例的负脉冲注入逻辑示意图;
49.图10示出了本发明的一个具体实施例的第二组正负脉冲注入判断逻辑及注入时间更新示意图;
50.图11示出了本发明的一个具体实施例的d轴正向和反向电流反馈比较逻辑示意图;
51.图12示出了本发明的一个实施例的极性判断装置的示意框图;
52.图13示出了本发明的一个实施例的电机控制系统的示意框图。
具体实施方式
53.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
54.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不限于下面公开的具体实施例的限制。
55.本发明第一方面的实施例,提出一种极性判断方法,用于确定电机的转子极性,通过以下实施例对该极性判断方法进行详细说明。
56.实施例一,图1示出了本发明的第一个实施例的极性判断方法的流程示意图。其中,该极性判断方法包括:
57.步骤102,向电机的估算直轴注入至多两组脉冲信号,至多两组脉冲信号中的每组脉冲信号均包括正脉冲信号和负脉冲信号;
58.步骤104,获取估算直轴的正向反馈电流峰值和负向反馈电流峰值;
59.步骤106,将正向反馈电流峰值的绝对值和负向反馈电流峰值的绝对值进行比较;
60.步骤108,根据比较结果确定电机的转子极性。
61.本发明实施例提供的极性判断方法,针对在小容值母线电容控制器高频注入极性判断过程中,通过一组或者两组正负脉冲信号注入,便可避免母线电压跌落甚至不足以提供脉冲注入所需的控制电压,导致通过电流反馈无法进行极性判断的情况,也即在母线电压足以提供脉冲注入所需的控制电压的前提下,通过电流反馈峰值进行极性判断,从而在不增加现有控制器系统成本的前提下,可以准确地实现永磁同步电机小容值母线电容控制器的高频注入极性判断,精度较高,方法简单易实现。
62.可以理解的,在完成一组正负脉冲信号注入后,如果未出现母线电压跌落甚至不足以提供脉冲注入所需的控制电压的情况,则仅需要一次正负脉冲注入就可以实现电机转子初始位置辨识的极性判断;如果出现母线电压跌落甚至不足以提供脉冲注入所需的控制电压的情况,则再注入一组正负脉冲,以确保通过电流反馈峰值进行极性判断。
63.此外,小容值母线电容控制器所采用的母线电容,其容值取值范围小于或等于10uf,但不限于此。
64.在上述实施例中,至多两组脉冲信号中的每组脉冲信号均为脉冲电压,且每组脉
冲电压中正脉冲电压的幅值与注入时间的乘积与负脉冲电压的幅值与注入时间的乘积相等,且在开始注入负脉冲电压的时刻,估算直轴的正向反馈电流已恢复为零。
65.在该实施例中,通过每组脉冲电压中正脉冲电压的幅值与注入时间的乘积与负脉冲电压的幅值与注入时间的乘积相等,以保证正负脉冲伏秒面积平衡,进而能够准确地通过电流反馈峰值进行极性判断。此外,在负脉冲的注入时刻要确保估算直轴基于正脉冲的正向电流反馈已经恢复到零,以保证注入正负脉冲的初始点相同,从而确保极性判断的准确性。
66.实施例二,图2示出了本发明的第二个实施例的极性判断方法的流程示意图。其中,该极性判断方法包括:
67.步骤202,在注入第一组脉冲电压的过程中,检测母线电压;
68.步骤204,判断母线电压是否小于或等于临界电压阈值;基于母线电压小于或等于临界电压阈值的情况,执行步骤206,基于母线电压大于临界电压阈值的情况,执行步骤210;
69.步骤206,停止注入当前脉冲电压,记录当前脉冲电压的持续时间,其中,当前脉冲电压包括第一组脉冲电压中的正脉冲电压和/或负脉冲电压;
70.步骤208,根据第一组脉冲电压中的正脉冲电压和/或负脉冲电压的持续时间,更新第二组脉冲电压中正脉冲电压和负脉冲电压的注入时间,并在第一组脉冲电压注入完毕后,注入更新后的第二组脉冲电压;
71.步骤210,获取估算直轴的正向反馈电流峰值和负向反馈电流峰值;
72.步骤212,将正向反馈电流峰值的绝对值和负向反馈电流峰值的绝对值进行比较;
73.步骤214,根据比较结果确定电机的转子极性。
74.在该实施例中,通过母线电压与临界电压阈值的比较,判断是否需要再次进行正负脉冲注入以及更新脉冲的注入时间;最后根据正向电流反馈峰值绝对值和负向电流反馈峰值绝对值的比较得到极性判断结果。具体而言,若在注入正脉冲电压过程中母线电压跌落至临界电压阈值,则停止正脉冲电压的注入,并记录注入正脉冲电压的持续时间;向估算直轴注入负脉冲电压,若在注入负脉冲电压过程中母线电压跌落至临界电压阈值,则停止负脉冲电压的注入,并记录注入负脉冲的持续时间。根据正负脉冲的持续时间更新第二组脉冲电压中正脉冲电压和负脉冲电压的注入时间。在完成第一组脉冲电压的注入之后,注入更新后的第二组脉冲电压。然后在获取正向反馈电流峰值和负向反馈电流峰值,进而完成极性判断。
75.在完成第一组次正负脉冲注入之后,若母线电压始终高于临界电压阈值,则可以直接获得估算直轴正向和负向电流反馈峰值的绝对值,并进行判断,在这种情况下,仅需要一次正负脉冲注入就可以实现初始位置辨识的极性判断。
76.可以理解的,当注入正脉冲过程中母线电压跌落至临界电压阈值,或者当注入负脉冲过程中母线电压跌落至临界电压阈值,甚至在正负脉冲注入过程中都发生了母线电压跌落至临界电压阈值的情况,则需要进行第二组正负脉冲注入,并根据第一组正负脉冲注入的结果(即第一组脉冲电压中的正脉冲电压和/或负脉冲电压的持续时间)更新脉冲注入时间。
77.本发明实施例提供的极性判断方法,较有电解电容控制器方案只需另外确定临界
电压阈值即可,方法简单易实现。
78.在上述实施例中,更新第二组脉冲电压的注入时间的方法如图3所示,具体包括:
79.步骤302,将u
p
与t
pc
的乘积与u
n
与t
nc
的乘积进行比较;
80.步骤304,基于u
p
与t
pc
的乘积等于u
n
与t
nc
的乘积,则无需更新第二组脉冲电压的注入时间;
81.步骤306,基于u
p
与t
pc
的乘积大于u
n
与t
nc
的乘积,则第二组脉冲电压中的正脉冲电压的注入时间t
p
=u
n
t
nc
/u
p
、负脉冲电压的注入时间t
n
=t
nc
;
82.步骤308,基于u
p
与t
pc
的乘积小于u
n
与t
nc
的乘积,则第二组脉冲电压中的正脉冲电压的注入时间t
p
=t
pc
、负脉冲电压的注入时间t
n
=u
p
t
pc
/u
n
;
83.其中,u
p
为第一组脉冲电压中的正脉冲电压的幅值,t
pc
为第一组脉冲电压中的正脉冲电压的持续时间,u
n
为第一组脉冲电压中的负脉冲电压的幅值,t
nc
为第一组脉冲电压中的负脉冲电压的持续时间。
84.在该实施例中,第二组正负脉冲电压的注入时间由第一组脉冲电压注入时u
p
t
pc
(u
p
与t
pc
的乘积)和u
n
t
nc
(u
n
与t
nc
的乘积)中的较小值决定的。如果u
p
t
pc
大于u
n
t
nc
,则第二组正脉冲的注入时间t
p
=u
n
t
nc
/u
p
,第二组负脉冲的注入时间t
n
=t
nc
;反之,如果u
p
t
pc
小于u
n
t
nc
,则第二组正脉冲的注入时间t
p
=t
pc
,第二组负脉冲的注入时间t
n
=u
p
t
pc
/u
n
。在第二组正负脉冲注入后,则可以获得估算直轴正向和负向电流反馈峰值的绝对值,并判断得到极性判断结果。
85.在上述任一实施例中,注入正脉冲电压的方法如图4所示,具体包括:
86.步骤402,向电机的估算直轴注入第一组脉冲电压的正脉冲电压;
87.步骤404,判断注入正脉冲电压的持续时间是否大于注入时间t1;若否,执行步骤406,若是,执行步骤410;
88.步骤406,检测母线电压,判断母线电压是否大于临界电压阈值;若否,执行步骤408,若是,返回步骤402;
89.步骤408,停止正脉冲电压的注入,记录注入正脉冲电压的持续时间t
pc
;
90.步骤410,将正脉冲电压的注入时间t1赋值给注入正脉冲电压的持续时间t
pc
。
91.在该实施例中,在正脉冲电压的注入过程中,若母线电压跌落至临界电压阈值,则停止正脉冲的注入,并记录注入正脉冲的持续时间t
pc
;若母线电压始终高于临界电压阈值,则继续注入正脉冲电压直至注入的时间达到预先设置的注入时间t1。
92.在上述任一实施例中,注入负脉冲电压的方法如图5所示,具体包括:
93.步骤502,向电机的估算直轴注入第一组脉冲电压的负脉冲电压;
94.步骤504,判断注入负脉冲电压的持续时间是否大于注入时间t2;若否,执行步骤506,若是,执行步骤510;
95.步骤506,检测母线电压,判断母线电压是否大于临界电压阈值;若否,执行步骤508,若是,返回步骤502;
96.步骤508,停止负脉冲电压的注入,记录注入负脉冲电压的持续时间t
nc
;
97.步骤510,将负脉冲电压的注入时间t2赋值给注入负脉冲电压的持续时间t
nc
。
98.在该实施例中,在负脉冲电压的注入过程中,若母线电压跌落至临界电压阈值,则停止负脉冲的注入,并记录注入负脉冲的持续时间t
pc
;若母线电压始终高于临界电压阈值,
则继续注入负脉冲电压直至注入的时间达到预先设置的注入时间t2。
99.在上述任一实施例中,临界电压阈值大于或等于估算直轴的反馈电流的斜率开始减小的时刻所对应的母线电压。
100.在该实施例中,首先确定估算直轴的反馈电流的斜率开始减小的拐点所对应的母线电压值,以此确定临界电压阈值,临界电压阈值需大于或等于该母线电压值,一旦临界电压阈值小于该拐点所对应的母线电压值,继续注入正负脉冲,就可能出现母线电压跌落过快甚至将不足以提供控制电机所需的控制电压,而系统却误以为母线电压始终未跌落,从而造成误判。
101.在上述任一实施例中,根据比较结果确定电机的转子极性的步骤,具体包括:基于正向反馈电流峰值的绝对值小于负向反馈电流峰值的绝对值的情况,估算直轴为真实直轴;基于正向反馈电流峰值的绝对值大于或等于负向反馈电流峰值的绝对值的情况,则真实直轴与估算直轴的方向相反。
102.在该实施例中,当正向反馈电流峰值的绝对值小于负向反馈电流峰值的绝对值时,估算直轴为真实直轴,即电机转子的初始位置所指向的磁极方向与估算直轴的正方向一致,而当正向反馈电流峰值的绝对值大于或等于负向反馈电流峰值的绝对值时,则说明估算直轴与真实直轴反向相反,即电机转子的初始位置所指向的磁极方向与估算直轴的正方向相反。具体实施例,提供了一种极性判断方法,在永磁同步电机小容值母线电容控制系统中,当使用本发明提供的极性判断方法时,主要分为以下步骤:
103.如图6所示,曲线s1为母线电压,直线s2为临界电压阈值,s3为d轴(即估算直轴)指令电压(即脉冲电压),曲线s4为d轴反馈电流,在确定正负脉冲注入幅值后,通过小容值母线电容控制器向d轴注入指令电压,其中,小容值母线电容的容值小于或等于10uf,临界电压阈值应大于或等于d轴反馈电流的斜率开始减小的拐点所对应的母线电压值,如图6中,曲线s4与直线s5的交点即为本发明实施例的拐点。
104.步骤一:如图7、图8所示,向估算d轴(即估算直轴)注入正脉冲电压时,脉冲幅值为u
p
、脉冲注入时间为t
p
,若母线电压始终高于临界电压阈值,则在注入正脉冲电压结束时刻记录当前估算d轴正向电流反馈峰值绝对值i
p
,并记录注入正脉冲电压的持续时间t
pc
=t
p
;若在向估算d轴注入正脉冲过程中母线电压跌落至临界电压阈值,则停止向估算d轴注入正脉冲电压,并记录注入正脉冲电压的持续时间t
pc
。
105.步骤二:如图7、图9所示,向估算d轴注入负脉冲时,脉冲幅值为-u
n
、脉冲注入时间为t
n
,若母线电压始终高于临界电压阈值,则在注入负脉冲结束时刻记录当前d轴负向电流反馈峰值绝对值i
n
,并记录注入负脉冲的持续时间t
nc
=t
n
;若在向估算d轴注入负脉冲过程中母线电压跌落至临界电压阈值,则停止向估算d轴注入负脉冲,并记录注入负脉冲的持续时间t
nc
。
106.u
p
t
p
需等于u
n
t
n
以保证伏秒面积平衡;且负脉冲的注入时刻要确保正脉冲的正向电流反馈已经恢复到零。
107.步骤三:如图10所示,第二次正负脉冲注入时间由第一次脉冲注入时u
p
t
pc
和u
n
t
nc
中的较小值决定的。如果u
p
t
pc
大于u
n
t
nc
,则第二次正脉冲的注入时间tp=u
n
t
nc
/up,第二次负脉冲的注入时间tn=tnc;反之,如果u
p
t
pc
小于u
n
t
nc
,则第二次正脉冲的注入时间t
p
=t
pc
,第二次负脉冲的注入时间t
n
=u
p
t
pc
/u
n
。在第二次正负脉冲注入后则可以获得d轴正向和负
向电流反馈峰值的绝对值,并判断得到极性判断结果。
108.步骤四:如图11所示,当极性判断脉冲注入结束后,进行极性判断电流反馈绝对值比较。若d轴正向电流反馈峰值绝对值i
p
小于d轴负向电流反馈峰值绝对值i
n
,则当前估算d轴为真实d轴;否则,当前估算d轴为真实d轴相反。
109.本发明实施例提供的极性判断方法,针对在小容值母线电容控制器高频注入极性判断过程中,母线跌落的情况,通过一次或者两次正负脉冲注入,可以准确地实现永磁同步电机小容值母线电容控制器的高频注入极性判断,精度较高;较有电解电容控制器方案只需另外确定临界电压阈值即可,方法简单易实现。
110.本发明第二方面的实施例,提出一种极性判断装置,图12示出了本发明的第一个实施例的极性判断装置600的示意框图。其中,该极性判断装置600包括:
111.存储器602,存储器602存储有计算机程序;
112.处理器604,处理器604执行计算机程序时实现如上述任一实施例的极性判断方法。
113.本发明实施例提供的极性判断装置600,计算机程序被处理器604执行时实现如上述任一实施例的极性判断方法的步骤,因此该极性判断装置600包括上述任一实施例的极性判断方法的全部有益效果。
114.本发明第三方面的实施例,提出一种电机控制系统,图13示出了本发明的第一个实施例的电机控制系统700的示意框图。其中,该电机控制系统700包括:
115.存储器702,存储器702存储有计算机程序;
116.处理器704,处理器704执行计算机程序时实现如上述任一实施例的极性判断方法。
117.本发明实施例提供的电机控制系统700,计算机程序被处理器704执行时实现如上述任一实施例的极性判断方法的步骤,因此该电机控制系统700包括上述任一实施例的极性判断方法的全部有益效果。
118.在上述实施例中,电机控制系统700还包括:母线电容控制装置,用于向电机的估算直轴注入至多两组脉冲信号。
119.在上述任一实施例中,母线电容控制装置所采用的母线电容的容值范围为:大于0,小于或等于10uf。
120.在该实施例中,在确定第一组正负脉冲电压的幅值后,通过小容值母线电容控制器向估算直轴注入正负脉冲电压,注入正负脉冲电压的过程中,采集母线电压,包括实时采集或者固定时间间隔的采集母线电压,通过母线电压与临界电压阈值的比较,判断是否需要再次进行正负脉冲电压的注入以及更新脉冲正负脉冲电压的注入时间;最后根据正向电流反馈峰值绝对值和负向电流反馈峰值绝对值的比较得到极性判断结果。本发明提供的电机控制系统,针对在小容值母线电容控制器高频注入极性判断过程中母线跌落的情况,通过一次或者两次正负脉冲注入,可以准确地实现永磁同步电机小容值母线电容控制器的高频注入极性判断。
121.根据本发明的第四方面实施例,提出了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如上述任一实施例的极性判断方法。
122.本发明提供的计算机可读存储介质,计算机程序被处理器执行时实现如上述任一
实施例的极性判断方法的步骤,因此该计算机可读存储介质包括上述任一实施例的极性判断方法的全部有益效果。
123.在本说明书的描述中,术语“第一”、“第二”仅用于描述的目的,而不能理解为指示或暗示相对重要性,除非另有明确的规定和限定;术语“连接”、“安装”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
124.在本说明书的描述中,术语“一个实施例”、“一些实施例”、“具体实施例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或实例。而且,描述的具体特征、结构、材料或特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
125.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1