一种原边反馈恒流控制系统的制作方法
[0001]
本发明涉及隔离型变换器技术领域,尤其涉及一种原边反馈恒流控制系统。
背景技术:
[0002]
隔离型交流—直流(alternating current to direct current,简称ac-dc)变换器能实现输入与输出的电气隔离,具有安全隔离及可靠性高的特点,广泛应用于手机、led电源、笔记本电脑等小功率应用场合。隔离型有源钳位ac-dc变换器通过改进钳位电路的设计方法,在回收变压器漏感能量的同时,实现了开关管的软开关,可以极大地减小变换器的开关损耗,提升变换器的开关频率,实现变换器功率提升与小型化的目标。
[0003]
有源钳位ac-dc变换器采用光耦反馈电路将输出电压、电流信号传递到原边控制电路,以实现原边开关管控制。然而光耦器件存在非线性、老化及温漂效应,因此变换器的工作温度区间较窄,其输出精度与稳定性不高,而原边反馈(psr)省去了采样光耦、减少了电路组件数目、降低了电路复杂程度,所以现在大多数反激变换器都采用psr控制。为了提高原边反馈反激式开关电源的功率应用范围,必然要求开关电源有一个更高的功率输出。ccm主要应用于大功率负载情况,而dcm主要应用于小功率负载情况,并且相对而言其控制环路比较稳定,要实现ccm模式下的高精度电流稳定性,便是当务之急,也是难点所在。
[0004]
为了实现输出电流的稳定性,已有采用的方式是,通过功率计算的方式,即pout/vo=io的方式实现恒流输出,这里pout是副边的输出功率,vo是副边的输出电压,io是副边的输出电流。实际采用这一策略的过程中,由于副边的输出功率pout未知,用原边输入功率pin代替副边的输出功率pout,但是pin的计算往往过于复杂,此外要得到副边的输出功率pout需要额外构建采样电路,传统恒流算法在在恒流的实现上代价过大,由于恒流效果与效率相关,效率受输入电压与负载大小的影响较大,而电流的稳定性却难以实现高精度。
[0005]
由于原边反馈无法直接采样输出电流,因此可以基于原边电流预测的开环控制方式实现恒定输出电流控制,为了提高输出电流的精度,需要补偿控制延迟以及相关非线性等引入的电流计算误差,但是由于原边恒流控制方法是基于线性的输出二极管电流计算来实现,对于有源钳位这样的显著非线性变换器是无法直接应用的。
[0006]
鉴于上述技术难点的存在,需要建立更高效的计算模型,从而实现更高精度的恒流特性。
技术实现要素:
[0007]
本发明的目的在于提出一种原边反馈恒流控制系统,该系统不仅适用于dcm模式,而且可以应用到ccm模式下,在提高恒流精度的同时,可以提高电路的功率应用范围。
[0008]
实现本发明目的的技术解决方案为:一种原边反馈恒流控制系统,包括输出反馈模块、电流检测、驱动模块、电流计算模块、误差计算模块、pid模块以及pwm模块,该控制系统与受控的开关电源连接起来构成一个闭环;
[0009]
输出反馈模块用于采集恒流算法所需的基本参数和计算次级电感电流的占空比;
输出反馈模块的输入信号包括辅助绕组反馈电压vfb、驱动模块输出主管开关控制信号duty和驱动模块输出辅助管开关控制信号duty_a,输出信号包括去磁时间信号tr值、模式识别信号flag、主管导通时间ton和辅助管单个周期内的导通时间ton_a,输出反馈模块包括一个比较器comp1和一个时间计算模块,比较器comp1的正端与辅助绕组反馈电压vfb相连,比较器comp1的负端接地,用于过零比较,比较器comp1的输出为scomp1,用于模式识别信号flag的判断,通过计算tr值来判断工作模式为dcm模式或ccm模式;
[0010]
电流检测模块的输入是原边采样电阻上的电压vp和pwm模块输出的峰值电压数字量vpp_dig,输出信号是主管导通阶段的原边电流平均值数字量ipav_dig,输出信号输入到电流计算模块;
[0011]
电流计算模块的输入信号是输出反馈模块提供的去磁时间tr、辅助管导通时间ton_a、模式识别信号flag以及电流检测模块提供的ipav_dig;该模块通过状态检测去判断是采用dcm还是ccm计算模型,通过电荷守恒的方式,计算输出电流的模拟量io,将模拟量转化为数字量io_dig作为误差计算模块的输入;所述电流计算模块输出电流io计算式为:
[0012]
dcm模式下的输出电流io表达式为:
[0013][0014]
其中,在开关周期ts内,id
r
(t)代表输出二极管电流与时间的函数,i
lm
(t)代表励磁电流与时间的函数,i
p
(t)代表原边电流与时间的函数,np是变压器的原边匝数,ns是变压器的副边匝数,q1是i
lm
(t)与i
p
(t)的差在t1时刻至励磁电流i
lm
(t)降为零时刻的积分值然后减去流入钳位电容的电量的差值,q3是指i
lm
(t)与i
p
(t)的差在时间上的积分值减去q1的那部分电量;
[0015]
ccm模式下的输出电流io表达式为:
[0016][0017]
其中,在开关周期ts内,q1是i
lm
(t)与i
p
(t)的差值在t1时刻至t3时刻的积分值然后再减去流入钳位电容的电量的差值,t1是主管导通结束时刻,t3是辅助管第一次导通结束时刻;q2是指i
lm
(t)与i
p
(t)的差值在t3时刻至t4时刻的积分值,q3是指流入钳位电容的电量;
[0018]
误差计算模块的输入是电流计算模块输出的电流数字量io_dig和参考电流常量,参考电流常量是根据系统设计指标给定的精确数字常量iref,给定的参考电流常量减去输入的电流数字量io_dig,两者差值即为采样误差,记为e1,输入到pid模块;
[0019]
pwm模块的输入为pid模块的补偿结果vpi,通过pid模块补偿结果vpi计算得到正常控制时开关周期与占空比的信息,得到周期与占空比信息后,pwm模块输出下一个开关周期ts值和原边峰值电流ipeak值给驱动模块,峰值电压数字量vpp_dig给电流检测模块;
[0020]
驱动模块的输入为pwm模块输出的信号ts和ipeak、原边采样电阻上电压vp以及反馈模块输出的主管导通时间ton和辅助管导通时间ton_a,ipeak值限定了原边采样电阻上的最大电流,即峰值电流,该电流正比于开关管的导通时间,所以ipeak也就限定了开关管的导通时间,所述模块驱动方式为:当主管导通的时候,duyt=1,当vp超过给定的参考值时,duty=0,经过一个死区时间td1,辅助管导通,此时duty_a=1,经过ton_a的时间,辅助
管关闭,duty_a=0,再经过t3时间,辅助管再次导通,duty_a=1,导通时间也为ton_a,再经过一个死区时间td2,本次开关周期结束,主管再次导通,开始新的一个开关周期,其中t3大于等于0,t3=ts-2*ton_a-td1-td2,当t3等于0的时候,为传统反激模式;结合上述的输入信号,驱动模块分别输出主管与辅助管的占空比波形,即duty与duty_a,两个占空比信号分别控制两个功率管的栅极,实现对环路的控制;同时duty信号与duty_a信号也是输出反馈模块进行信息处理的输入信号。
[0021]
进一步地,变换器为有源钳位反激变换器时,所述电流计算模块输出电流io为:
[0022]
dcm输出电流io为:
[0023][0024]
其中,开关周期ts内,i
pp
是原边电流的峰值,t42是t2与t4的时间间隔,t2是辅助管第一次导通的起始时刻,t4是续流二极管第一次电流降为零的时刻;t75是t5与t7的时间间隔,t5表示辅助管第二次导通的起始时刻,t7是续流二极管再一次关闭的时刻;
[0025]
dcm输出电流io为:
[0026][0027]
其中,开关周期ts内,i
pm
是原边电流最小值,t62是ccm模式下的去磁时间,t86是t8与t6之间的时间间隔,t6是辅助管第二次关闭的起始时刻,t8是辅助管第二次关闭后辅助绕组反馈电压降为0的时刻,t98是t9与t8之间的时间间隔,t9是开关周期结束时刻。
[0028]
与现有技术相比,本发明的显著优点为:
[0029]
(1)本发明采用简单的dac单元与比较器,通过采样辅助绕组反馈电压,经过比较器运算,可以实现变换器工作输出电流的平均值计算,应用于ccm模式与dcm模式,本发明在控制实现方法上简单,灵活,易于实现,免去了副边对于输出电压的采样电路,降低了电源开发成本;本发明在原理、思路上的创新是带来这一优势的最根本的原因;
[0030]
(2)本发明根据电荷守恒,通过对输出二极管电流在时间上积分求平均值得到输出电流的大小,从而实现输出恒流,在dcm模式下,相比较传统的恒流算法,实现了更高的恒流输出精度;
[0031]
(3)本发明能够适用于隔离式或者非隔离开关电源电路结构,具备通用性、可复用性和可移植性。
附图说明
[0032]
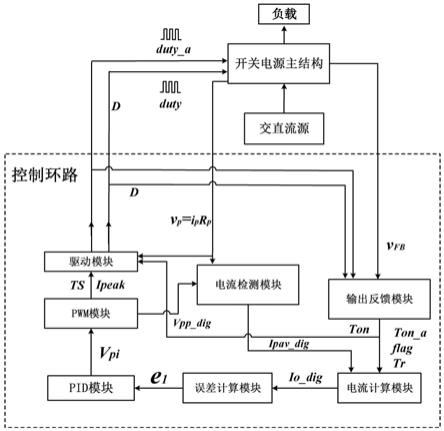
图1是本发明控制方法的系统结构框图。
[0033]
图2(a)是输出反馈模块dcm模式下的工作波形示意图。
[0034]
图2(b)是输出反馈模块ccm模式下的工作波形示意图。
[0035]
图3(a)是dcm模式下有源钳位反激变换器输出电流示意图。
[0036]
图3(b)是ccm模式下有源钳位反激变换器输出电流示意图。
[0037]
图4(a)是一种有源钳位反激变换器电荷量q
a
和q
b
的示意图。
[0038]
图4(b)是一种有源钳位反激变换器电荷量q
a
’
和q
b
’
的示意图。
[0039]
图4(c)是一种有源钳位反激变换器电荷量q
c
’
、q
d
’
和q
e
’
示意图。
[0040]
图5是本发明实施的结构电路图。
具体实施方式
[0041]
如图1所示,一种原边反馈恒流控制系统,包括输出反馈模块、电流检测、驱动模块、电流计算模块、误差计算模块、pid模块以及pwm模块构成的控制系统,输出反馈模块实现参数的采集与计算,其输出结果用于电流模块的计算,电流计算模块基于输出反馈模块与电流检测模块所提供的参数进行运算,所得结果,进入误差计算模块,将所得结果与参考值进行比较,所得误差进入pid模块运算,可以求得原边采样电压的峰值,在pwm模块中,根据采样电压峰值可以进行模式的判断,根据对应的模式求得下一个开关周期ts,以及原边电流峰值,最后经过一个驱动模块,驱动开关管的开关断,pwm模块所得的数字量用于电流检测模块,经过电流检测与计算再用于电流计算模块,实现电流的计算,从而实现各模块之间的连接,形成一个完整的闭环,即整个控制系统与受控的开关电源连接起来构成一个闭环;
[0042]
输出反馈模块主要采集需要实现恒流算法的一些基本参数,电流计算模块在开关导通阶段计算原边电感的电流以及变压器的励磁电感电流,根据输出二极管电流正比于变压器励磁电感电流与原边电流的差值,通过对输出二极管电流在时间上积分求平均值可以得到输出电流的大小,该输出值在数字pid模块中执行补偿算法,补偿值输出给pwm控制模块,并经驱动模块输出合适的占空比,从而有效控制数字电源的高精度恒流;
[0043]
输出反馈模块是用于采集恒流算法所需的基本参数和计算次级电感电流的占空比;输出反馈模块的输入信号包括辅助绕组反馈电压v
fb
,以及驱动模块输出主管开关控制信号duty和辅助管开关控制信号duty_a,输出信号包括去磁时间信号tr值、模式识别信号flag、主管导通时间ton以及辅助管单个周期内的导通时间ton_a,输出反馈模块包括一个比较器comp1和一个时间计算模块,比较器comp1的正端与辅助绕组反馈电压vfb相连,比较器comp1的负端接地,用于过零比较。比较器comp1的输出为scomp1,用于模式识别信号flag的判断,通过计算tr值来判断判断工作模式为dcm模式或ccm模式,对于dcm模式,当副边电流降为0的时候,辅助绕组上的电压会出现谐振现象,为了更为精确的计算tr值,scomp1=1对应的系统时间内需要扣除掉四分之一的谐振周期才是准确的tr值,而对于ccm模式,在duty=0期间,scomp1始终保持为1,这时duty=0计算出的时间即为tr值,用flag进行模式的标记,即flag=1表示ccm工作模式,而flag=0表示dcm工作模式,其判断的依据就是在次边电流恢复到0后,辅助绕组上分压电阻上的电压是否出现谐振,如果出现谐振,表示处于dcm工作模式,如果没有出现谐振,表示处于ccm工作模式,由以上分析可知在tr值的计算上dcm模式和ccm模式是略有不同的。
[0044]
图2(a)是dcm模式下的tr计算工作原理图,dcm模式下典型的特征就是,下一次开关导通之前存在一个谐振,也即死区时间,为了精确计算tr值,可以利用duty以及scomp1信号,对vfb信号划分三个工作区域,并用state表示:
[0045]
当duty=1即为第一工作区,用state=0来表示;
[0046]
当state=0,scomp1=1时,进入第二工作区域,此时state变为1,即用state=1来表示第二工作区域;
[0047]
当state=1,scomp1首次变为0,即为第三工作区域,此时state变为2,即用state
=2来表示。
[0048]
首先计算state=1的时间长度,计为tr_temp,然后通过添加一个过零时变量rise可以计算state=2后第一个谐振半周期t_half,此时tr=tr_temp-t_half/2,利用此式计算得到的tr值较为精确,而t_half的计算方法如下:
[0049]
在state=0或者state=1阶段rise始终为0;
[0050]
在state=2,rise=0,scomp1=0时,rise保持0;
[0051]
在state=2,scomp1=1时,rise变为1,其他情况rise保持为1。
[0052]
这样,state=2阶段,除第1个谐振半周期rise=0,其他谐振阶段,rise都为1,即state=2,rise=0对应的时间段即为t_half。
[0053]
将flag的初值设为1,即默认为ccm模态,如果duty不为0期间,出现scomp1=0,则把flag设为0,表明是电路进入了dcm工作模式。ccm下的tr计算方式参看图2(b),根据内部时钟信号计算state=1的时间长度就是tr值。
[0054]
电流检测模块的输入是原边采样电阻上的电压vp和pwm模块输出的原边峰值电流转化的峰值电压数字量vpp_dig,输出信号是主管导通阶段的原边电流平均值数字量ipav_dig,输出信号输入到电流计算模块,进行电流计算;以一种峰值电流计算方式为例,电流检测模块包括一个dac,两个比较器comp2和comp3以及一个运算模块,比较器comp2的正端接原边采样电阻电压vp,负端接数字输出量vpp_dig经过一个dac之后的模拟输出量vpp,比较器输出结果scomp2,比较器comp3的正端接的是vp,负端接的是数字输出量vpp的部分分压vpp_k,其中vpp_k=k*vpp,0<k<1,比较器输出结果是scomp3,两个比较器的输出结果经过一个运算模块,可以求出原边电流真实的最大值与真实的最小值,从而求出主管导通阶段的原边电流平均值数字量ipav_dig;
[0055]
驱动模块的输入为pwm模块输出的信号ts和ipeak、原边采样电阻上电压vp以及反馈模块输出的主管导通时间ton和辅助管导通时间ton_a,ipeak值限定了原边采样电阻上的最大电流,即峰值电流,该电流正比于开关管的导通时间,所以ipeak也就限定了开关管的导通时间,所述模块驱动方式为:结合图2(a),当主管导通的时候,duyt=1,当vp超过给定的参考值时,duty=0,经过一个死区时间td1,辅助管导通,此时duty_a=1,经过ton_a的时间,辅助管关闭,duty_a=0,再经过t3时间,辅助管再次导通,duty_a=1,导通时间也为ton_a,再经过一个死区时间td2,主管再次导通,开始新的一个开关周期,其中t3大于等于0,t3=ts-2*ton_a-td1-td2,当t3等于0的时候,为传统反激模式;结合上述的输入信号,驱动模块分别输出主管与辅助管的占空比波形,即duty信号与duty_a,两个占空比信号分别控制两个功率管的栅极,实现对环路的控制;同时duty信号与duty_a信号也是输出反馈模块进行信息处理的输入信号;
[0056]
电流计算模块的输入信号是输出反馈模块提供的去磁时间tr、辅助管导通时间ton_a、模式识别信号flag以及电流检测模块提供的ipav_dig,模块通过状态检测去判断是采用dcm还是ccm计算模型,通过电荷守恒的方式,计算输出电流的模拟量io,将模拟量转化为数字量io_dig作为误差计算模块的输入。电流计算模块是实现数字开关电源输出恒流的一个关键模块,通过采用不同的计算模型,保证在dcm模式或者ccm模式都可以获得较高的恒流精度。
[0057]
对于flag=0,即dcm模式,参考图3(a),t3等于0,是传统的反激模式,采用电荷守
恒计算输出电流平均值,输出二极管电流i
dr
正比于变压器励磁电流ilm与原边电流ip的差值,通过计算输出二极管电流在时间上积分平均值可以得到输出电流的大小,励磁电流i
lm
(t)与原边电流i
p
(t)的差值在时间上的积分可以看成电量q1与q3的和,因此输出电流io可以表达为:
[0058][0059]
其中i
dr
(t)代表输出二极管电流与时间的函数,i
lm
(t)代表励磁电流与时间的函数,ip(t)代表原边电流与时间的函数,np是变压器的原边匝数,ns是变压器的副边匝数,q1是i
lm
(t)与i
p
(t)的差在t1时刻至励磁电流i
lm
(t)降为零时刻的积分值然后减去流入钳位电容的电量的差值,q3是指i
lm
(t)与i
p
(t)的差在时间上的积分值减去q1的那部分电量。
[0060]
对于flag=1,即ccm模式,参看图3(b),输出电流io可以表达为:
[0061][0062]
其中,q1是i
lm
(t)与i
p
(t)的差值在t1时刻至t3时刻的积分值然后再减去流入钳位电容的电量的差值,q2是指i
lm
(t)与i
p
(t)的差值在t3时刻至t4时刻的积分值,q3是指流入钳位电容的电量;当变换器稳定时,vcc(t1)等于vcc(t3),即流入钳位电容的电流q3等于流出钳位电容的电量q4,输出电流式(2)可以进一步表达为:
[0063][0064]
对于dcm与ccm模式,电量组成的波形都可以转化为线性的规则波形,该规则波形的面积可以根据原边电流以及时间变量计算得到,从而得到输出电流io。
[0065]
对于有源钳位反激变换器,此时t3大于0,参考图4(a),dcm模式下输出电流io可以表达为:
[0066][0067]
ts是开关周期,q
a
与q
b
如图4(a)中所示,是需要计算的电荷量,n
ps
是原边绕组与副边绕组的匝数比,t0到t9是积分的上下限,表示的是一个开关周期的时长,等于ts,其中qa可以具体表达为:
[0068][0069]
其中,开关周期内,t2是开关辅助管第一次导通的起始时刻,t4是续流二极管第一次电流降为零的时刻,即积分的上下限时间等同于去磁时间。
[0070]
q
b
可以具体表达为:
[0071][0072]
其中,开关周期内,t5表示辅助管第二次导通的起始时刻,t7是续流二极管再一次关闭的时刻;
[0073]
因为励磁电流在开关周期的不同阶段可以看作是线性的,但是原边电流在辅助管
导通的时候是非线性的,因此不能采用传统的方法进行求解,所以通过数学关系的变形,输出电流io可以变换为表达式(7):
[0074][0075]
其中,t2到t3是辅助管第一次导通到第一次关闭的时间,t5到t6是辅助管第二次导通到第二次关闭的时间,t6到t7是指辅助管第二次关闭的时候到续流二极管第二次关闭的时间。
[0076]
从上述表达式可以看出,由于输出电流的非线性,可以先计算励磁电流的电荷量,参看图4(b),图中阴影部分为励磁电流ilm的电荷量,即t2至t4时间的电荷量q
a
’
与t5至t7时间的电荷量q
b
’
,考虑到励磁电流是线性的,因此励磁电流电荷量的大小,即q
a
’
与q
b
’
的和可以通过在t2至t7这个时间段求积分获得。因为辅助管开通,原边电流呈现非线性特点,原边电流电荷量在t2至t7时间段求积分,可以分为图4(c)的三部分进行求解,即t2至t3时间的电荷量qc
’
,t5至t6时间段的电荷量q
d
’
,t6至t7时间段的电荷量q
e
’
;在变换器稳定的时候,考虑到钳位电容的电荷守恒规则,q
c
’
与q
d
’
的电荷量是相等的,又因为q
e
’
相较于q
a
’
与q
b
’
是非常小的,所以输出电流io可以近似化简为只有电荷量q
a
’
与q
b
’
相关的关系式;
[0077]
由于开关管的寄生电容非常小,所以在图4(b)中的t1与t2的时间间隔t21也是非常小的,ip可以认为是几乎没有改变的,因为q
a
’
与q
b
’
即图4(b)中的阴影部分都是线性的,所以表达式(7)可以进一步变换为表达式(8):
[0078][0079]
ipp是原边电流的峰值,等于ipeak,t42是t2与t4的时间间隔,t75是t5与t7的时间间隔,ts是开关周期。
[0080]
表达式(8)是此种有源钳位反激变换器在dcm模式下的输出电流关系式,类似的,可以根据图2(b)以及电荷守恒原理求出在ccm模式下的输出电流表达式为:
[0081][0082]
其中,i
pm
是原边电流最小值,因为是ccm模式,所以原边电流没有降到零,一个开关周期内,t62是ccm模式下的去磁时间,t86是t8与t6之间的时间间隔,t6是辅助管第二次关闭的起始时间,t8是辅助管第二次关闭后辅助绕组反馈电压v
fb
降为0的时间,t98是t9与t8之间的时间间隔,t9是开关周期结束时间;ts是开关周期;
[0083]
需要的计算数据可以通过控制系统的相关模块获得,从而求出输出电流。
[0084]
误差计算模块的输入是电流计算模块的输出电流数字量io_dig和参考电流常量,参考电流常量是根据系统设计指标给定的精确数字常量iref,给定的参考电流常量减去输入的电流数字量io_dig,两者差值即为采样误差,记为e1,输入到pid模块进行下一步的运算;
[0085]
pid模块主要是进行pid运算,其输入是误差计算模块的输出值e1,模块包括积分、比例、微分及求和四个运算单元,在不同工作模式下,积分、比例和微分单元分别选取合适的积分参数kp、比例参数ki、微分参数kd进行运算,三个运算单元的输出在求和运算单元中求和,求和运算模块输出补偿结果vpi,补偿结果输入到pwm模块;
[0086]
pwm模块的输入为pid模块的补偿结果vpi,通过pid模块补偿结果vpi计算得到正常控制时开关周期与占空比的信息,得到周期与占空比信息后,pwm模块可以输出开关周期ts值和原边峰值电流ipeak值给驱动模块,其中ts值是pwm模块根据输入信号计算得到的下一个开关周期的长度,而ipeak则限定了原边采样电阻上的最大峰值电流;pwm模块利用pid模块输出的vpi值,输出开关周期ts值与原边峰值电流,用于驱动模块的信息处理,输出合适的占空比,再进行电流计算模块的信息处理,从而实现电流的闭环计算与补偿。
[0087]
因此重复上述过程进行循环控制开关电源功率管的开通和关断,以使系统更加稳定,从而获得更高的恒流精度。
[0088]
图5,是一种原边反馈恒流控制系统的实施电路结构图,包括变换器的拓扑结构与控制环路,拓扑结构主要说明如下,交流电经过整流桥整流,并通过一个滤波电容获得直流电压,采用开关管代替了传统rcd钳位的方式,可以回收变压器的漏感,变压器采用增加原边辅助绕组这一设计思路从而实现原边采样,取代传统的副边采样,即移除光耦器件,副边绕组是连接一个续流二极管,输出端连接负载,实现稳定输出,整个拓扑采用两个开关管构成半桥的结构,其驱动信号与控制环路相连接,通过控制环路实现数字控制;控制环路包括输出反馈模块、电流检测、驱动模块、电流计算模块、误差计算模块、pid模块以及pwm模块构成的控制系统,输出反馈模块实现参数的采集与计算,其输出结果用于电流模块的计算,电流模块基于输出反馈模块与电流检测模块所提供的参数进行运算,所得结果,进入误差计算模块,将所得结果与参考值进行比较,所得误差进入pid模块运算,可以求得原边采样电压的峰值,在pwm模块中,根据采样电压峰值可以进行模式的判断,根据对应的模式求得对应的周期ts,以及原边电流峰值,最后经过一个驱动模块,驱动开关管的开关断,pwm模块所得的数字量用于电流检测模块,经过电流检测与计算再用于电流计算模块,实现电流的计算,从而实现各模块之间的连接,形成一个完整的闭环,即整个控制系统与受控的开关电源连接起来构成一个闭环。
[0089]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明,在此描述的本发明可以有许多变化,在其他开关电源中都可以使用恒流算法控制,这种变化不能人为偏离本发明的精神和范围。因此,所有对本领域技术人员显而易见的改变,都应包括在本权利要求书的涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1