一种贴片式压电驱动的水下螺旋桨矢量推进系统及其方法与流程
[0001]
本发明涉及压电作动和水下螺旋桨矢量推进系统领域,尤其涉及一种贴片式压电驱动的水下螺旋桨矢量推进系统及其方法。
背景技术:
[0002]
海洋在我国国防建设和经济发展中占有举足轻重的地位。由于海洋资源勘探以及国防建设需要,水下推进系统得到了很大发展。螺旋桨矢量水下推进系统实用性强、可靠便捷,技术成熟操作便利,是水下推进系统的主要研究对象。然而,现有的螺旋桨矢量推进系统存在许多缺点,比如,复杂的传动结构导致多种运动耦合使得传动精度下降、深海高压环境下机体以及电机密封困难。
[0003]
压电驱动是一种利用压电材料逆压电效应激发弹性体微幅振动,并通过摩擦作用将振动转换成宏观运动的直接驱动方式。采用压电驱动技术将水下推进系统设计成无包裹结构,压电驱动元件可以直接在海水环境下运行,结构上不会存在密封问题。采用压电驱动的水下螺旋桨矢量推进系统可以直接驱动无需传动机构,有利于轻量化、小型化。
技术实现要素:
[0004]
本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种贴片式压电驱动的水下螺旋桨矢量推进系统及其方法。
[0005]
本发明为解决上述技术问题采用以下技术方案:一种贴片式压电驱动的水下螺旋桨矢量推进系统,包含壳体、压电驱动单元和螺旋桨;所述壳体包含支撑部、第一至第四连接辐条、十字辐条和球绞;所述十字辐条包含两根等长且在中点相互垂直固连的固定条;所述支撑部为圆柱体,其端面和十字辐条所在平面平行;所述第一至第四连接辐条均呈l形,周向均匀设置在所述支撑部侧壁上;第一至第四连接辐条的一端均和所述支撑部的侧壁固连、另一端分别和所述十字辐条的四个末端垂直固连,使得所述支撑部和十字辐条相互固定且同轴;所述球绞包含球壳和球体,所述球壳为沿其轴线设有通孔的圆柱体,其内设有和所述球体相匹配的球形腔体;所述球体设置在球壳内的腔体中,能够自由转动,且球体沿球壳轴线设有螺纹通孔;所述十字辐条中心处设有用于安装所述球壳的通孔,所述球壳固定在所述十字辐条中心的通孔中、和十字辐条同轴;所述支撑部靠近十字辐条的端面上设有半球形凹槽,该半球形凹槽和支撑部同轴;所述压电驱动单元包含金属基体、以及第一至第四压电陶瓷片;所述金属基体包含驱动部和承载部;所述承载部为一端开口的空心长方体,包含四个侧壁和一个底壁;所述驱动部呈四棱锥状,其底面和所述承载部开口端对应固连、顶端设有驱动足;所述驱动部和承载部同轴;
所述第一至第四压电陶瓷片分别设置在所述承载部的四个侧壁的外壁上,均沿厚度方向极化、极化方向均朝外或均朝内;所述螺旋桨包含桨轴和若干叶片,所述若干叶片周向均匀设置在所述桨轴的一端;所述桨轴的外壁上设有用于和所述球体上螺纹通孔相配合的外螺纹;所述桨轴远离叶片的一端依次穿过所述球壳上的通孔、球体上的螺纹通孔后和所述承载部底壁的中心固连,通过桨轴上的外螺纹和球体螺纹通孔相配合使得驱动部顶端的驱动足抵住所述支撑部上半球形凹槽的中心从而施加预压力,通过改变桨轴上外螺纹在球体螺纹孔的旋进距离改变预压力大小。
[0006]
球体与桨轴通过螺纹连接;通过改变桨轴在球体中的旋进距离,可以改变压电驱动单元与半球状凹壳之间的预压力大小。
[0007]
作为本发明一种贴片式压电驱动的水下螺旋桨矢量推进系统进一步的优化方案,还包含螺纹连接头,所述螺纹连接头呈圆柱状、其侧壁上设有外螺纹;螺纹连接头的一端和所述支撑部远离十字辐条的一端同轴固连,用于和外界配合固定整个水下螺旋桨矢量推进系统。
[0008]
作为本发明一种贴片式压电驱动的水下螺旋桨矢量推进系统进一步的优化方案,所述承载部的四个侧壁的外壁上分别设有用于设置第一至第四压电陶瓷片的凹槽。
[0009]
作为本发明一种贴片式压电驱动的水下螺旋桨矢量推进系统进一步的优化方案,所述承载部底壁的中心设有通孔,所述桨轴远离叶片的一端和所述承载部底壁上的通孔轴过盈连接。
[0010]
作为本发明一种贴片式压电驱动的水下螺旋桨矢量推进系统进一步的优化方案,所述第一至第四压电陶瓷片上均涂有硅橡胶或dp460环氧胶水。
[0011]
本发明还公开了一种该贴片式压电驱动的水下螺旋桨矢量推进系统的工作方法,包含如下步骤:令第一、第三压电陶瓷片相互平行,第二、第四压电陶瓷片相互平行;如果需要平动,即进行推进或后退:分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第一信号和第二信号在时间相位上相差π/2,第一信号和第三信号在时间相位上相差3π/2,第二信号和第四信号在时间相位上相差3π/2;在电信号激励下,压电驱动单元金属基体上产生在时间上和空间上均相差90度相位差的二阶弯振模态,两个二阶弯振复合,在压电驱动单元的驱动头部分产生平行于支撑部远离十字辐条的端面的微幅椭圆运动;驱动头与支撑部通过摩擦作用,使得压电驱动单元旋转,带动螺旋桨旋转,产生推进力;通过改变第一信号和第二信号相位差为-π/2,改变金属基体驱动头的微幅旋转运动方向,即可改变螺旋桨旋转的方向,产生后退力;如果需要水平转向:分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第一和第三信号相同,第二信号和第一信号在时间相位上相差π/2,第二信号和第四信号在时间相位上相差π;使得压电驱动单元上同时产生一阶纵振和二阶弯振;通过一阶纵振和二阶弯振的复合,使得驱动头表面质点产生平行于水平面的微幅椭圆运动,通过摩擦作用驱动桨轴沿水平反向转动,从而实现水平转向;通过改变第一信号和第二信号的相
位差为-π/2,改变金属基体驱动头微幅椭圆运动的运动方向,驱动螺旋桨向另一水平方向转向;如果需要垂直转向:分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第二信号和第四信号相同,第一信号和第二信号在时间相位上相差π/2,第一信号和第三信号在时间相位上相差π,使得压电驱动单元上同时产生一阶纵振和二阶弯振;通过一阶纵振和二阶弯振的复合,使得驱动头表面质点产生平行于垂直面的微幅椭圆运动,通过摩擦作用驱动桨轴沿垂直方向转动,从而实现垂直转向;通过改变第一信号和第二信号的相位差为-π/2,改变金属基体驱动头微幅椭圆运动的运动方向,驱动螺旋桨向另一垂直方向转向。
[0012]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:1. 结构简单,无密封装置和复杂传动结构;2. 采用压电驱动技术直接驱动,易于实现小型化、轻量化;3. 采用螺旋桨结构实现矢量推进。
附图说明
[0013]
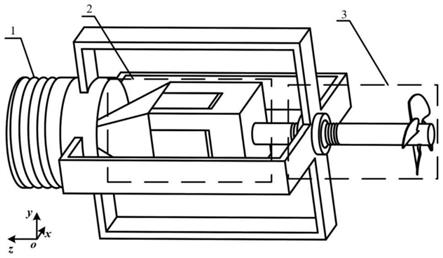
图1是本发明一种贴片式压电驱动的水下螺旋桨矢量推进系统结构示意图;图2是本发明中壳体结构示意图;图3是本发明中压电驱动单元的结构示意图;图4是本发明中螺旋桨和球壳相配合的结构示意图;图5(a)、图5(b)分别是本发明中十字辐条和球体相配合的结构示意图、剖面图;图6(a)、图6(b)分别是本发明中压电陶瓷分布示意图、极化方向示意图;图7是本发明中平动工作状态下的电信号施加示意图;图8是本发明中相差90
°
的二阶弯振对比示意图;图9是本发明中平动工作状态下压电驱动单元的驱动足表面质点椭圆运动示意图;图10是本发明中平动工作状态下压电驱动单元的驱动足表面质点一个周期内的模态示意图;图11是本发明中平动工作状态示意图;图12是本发明中转向工作状态下的电信号施加示意图;图13是本发明中一阶纵向振动和二阶弯振模态的对比示意图;图14是本发明中转向时压电驱动单元的驱动足表面质点椭圆运动示意图;图15是本发明中转向工作状态下压电驱动单元的驱动足表面质点一个周期内的模态示意图;图16是本发明中转向工作状态下水平转向示意图;图17是本发明中转向工作状态下垂直转向示意图。
[0014]
图中,1-壳体,2-压电驱动单元,3-螺旋桨,1.1-螺纹连接头,1.2-连接辐条,1.3-十字辐条,1.4-支撑部,2.1-金属基体,2.2-压电陶瓷,2.1.1-驱动足,2.1.2-驱动部,2.1.3-承载部,2.2.1-第一压电陶瓷片,2.2.2-第二压电陶瓷片,2.2.3-第三压电陶瓷片,2.2.4-第四压电陶瓷片,3.1-桨轴,3.2-球体,3.3-叶片。
具体实施方式
[0015]
下面结合附图对本发明的技术方案做进一步的详细说明:本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
[0016]
如图1所示,本发明公开了一种贴片式压电驱动的水下螺旋桨矢量推进系统,包含壳体、压电驱动单元和螺旋桨。
[0017]
如图2所示,所述壳体包含螺纹连接头、支撑部、第一至第四连接辐条、十字辐条和球绞;所述十字辐条包含两根等长且在中点相互垂直固连的固定条;所述支撑部为圆柱体,其端面和十字辐条所在平面平行;所述第一至第四连接辐条均呈l形,周向均匀设置在所述支撑部侧壁上;第一至第四连接辐条的一端均和所述支撑部的侧壁固连、另一端分别和所述十字辐条的四个末端垂直固连,使得所述支撑部和十字辐条相互固定且同轴;所述球绞包含球壳和球体,所述球壳为沿其轴线设有通孔的圆柱体,其内设有和所述球体相匹配的球形腔体;所述球体设置在球壳内的腔体中,能够自由转动,且球体沿球壳轴线设有螺纹通孔;所述十字辐条中心处设有用于安装所述球壳的通孔,所述球壳固定在所述十字辐条中心的通孔中、和十字辐条同轴,如图5(a)、图5(b)所示;所述支撑部靠近十字辐条的端面上设有半球形凹槽,该半球形凹槽和支撑部同轴;所述螺纹连接头呈圆柱状、其侧壁上设有外螺纹;螺纹连接头的一端和所述支撑部远离十字辐条的一端同轴固连,用于和外界配合固定整个水下螺旋桨矢量推进系统;如图3所示,所述压电驱动单元包含金属基体、以及第一至第四压电陶瓷片;所述金属基体包含驱动部和承载部;所述承载部为一端开口的空心长方体,包含四个侧壁和一个底壁;所述驱动部呈四棱锥状,其底面和所述承载部开口端对应固连、顶端设有驱动足;所述驱动部和承载部同轴;如图6(a)、图6(b)所示,所述第一至第四压电陶瓷片分别设置在所述承载部的四个侧壁的外壁上,均沿厚度方向极化、极化方向均朝外或均朝内;如图4所示,所述螺旋桨包含桨轴和若干叶片,所述若干叶片周向均匀设置在所述桨轴的一端;所述桨轴的外壁上设有用于和所述球体上螺纹通孔相配合的外螺纹;所述桨轴远离叶片的一端依次穿过所述球壳上的通孔、球体上的螺纹通孔后和所述承载部底壁的中心固连,通过桨轴上的外螺纹和球体螺纹通孔相配合使得驱动部顶端的驱动足抵住所述支撑部上半球形凹槽的中心从而施加预压力,通过改变桨轴上外螺纹在球体螺纹孔的旋进距离改变预压力大小。
[0018]
桨轴和承载部底壁固连的方式可以采用以下方式:承载部底壁的中心设有通孔,所述桨轴远离叶片的一端和所述承载部底壁上的通孔轴过盈连接。
[0019]
所述承载部的四个侧壁的外壁上分别设有用于设置第一至第四压电陶瓷片的凹槽,使得承载板四个侧壁整体平整。
[0020]
所述第一至第四压电陶瓷片上均涂有硅橡胶或dp460环氧胶水,用以防水。
[0021]
本发明还公开了一种该贴片式压电驱动的水下螺旋桨矢量推进系统的工作方法,包含如下步骤:令第一、第三压电陶瓷片相互平行,第二、第四压电陶瓷片相互平行;如果需要平动(推进或后退):如图7所示,分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第一信号和第二信号在时间相位上相差π/2,第一信号和第三信号在时间相位上相差3π/2,第二信号和第四信号在时间相位上相差3π/2;如图8所示,在电信号激励下,压电驱动单元金属基体上产生在时间上和空间上均相差90度相位差的二阶弯振模态;如图9所示,两个二阶弯振复合,在压电驱动单元的驱动头部分产生平行于xoy面的微幅椭圆运动;如图10所示,为推进工作状态下压电驱动单元的驱动足表面质点一个周期内的模态示意图;如图11所示,驱动头与支撑部通过摩擦作用,使得压电驱动单元旋转,带动螺旋桨旋转,产生推进力;通过改变第一信号和第二信号相位差为-π/2,改变金属基体驱动头的微幅旋转运动方向,进而改变螺旋桨旋转的方向,产生后退力。
[0022]
如果需要水平转向:如图12所示,分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第一和第三信号相同,第二信号和第一信号在时间相位上相差π/2,第二信号和第四信号在时间相位上相差π;如图13所示,施加的电信号使得压电驱动单元上同时产生一阶纵振和二阶弯振;如图14所示,通过一阶纵振和二阶弯振的复合,使得驱动头表面质点产生平行于xoz平面的微幅椭圆运动;如图15所示,为转向工作状态下压电驱动单元的驱动足表面质点一个周期内的模态示意图;如图16所示,通过驱动头与支撑部之间的摩擦作用,驱动桨轴沿水平方向转动,从而实现水平转向;通过改变第一信号和第二信号的相位差为-π/2,改变金属基体驱动头微幅椭圆运动的运动方向,驱动螺旋桨向另一水平方向转向;如果需要垂直转向:分别对第一至第四压电陶瓷片施加第一至第四信号,所述第一至第四信号均为交流谐波信号,第二信号和第四信号相同,第一信号和第二信号在时间相位上相差π/2,第一信号和第三信号在时间相位上相差π,使得压电驱动单元上同时产生一阶纵振和二阶弯振;通过一阶纵振和二阶弯振的复合,使得驱动头表面质点产生平行于yoz平面的微幅椭圆运动,通过摩擦作用驱动桨轴沿垂直方向转动,从而实现垂直转向,如图17所示;通过改变第一信号和第二信号的相位差为-π/2,改变金属基体驱动头微幅椭圆运动的运动方向,驱动螺旋桨向另一垂直方向转向。
[0023]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还
应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0024]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1