一种外转子永磁同步电机直驱的电动舵机系统的制作方法
1.本发明涉及舵机技术领域,尤其是一种外转子永磁同步电机直驱的电动舵机系统。
背景技术:
2.舵机伺服驱动系统作为飞机、导弹等飞行姿态控系统的执行部件,是典型的位置伺服系统。电动舵机为机电一体化部件,其电气部分包括主功率电路、控制电路和辅助源电路,机械部分由电机、联轴器、减速器、舵面负载模拟器组成。近年来随着航空航天技术的飞速发展,促使导弹舵机向着小型化、轻质化、低成本、高精度、高响应的方向大幅度的迈进,这就进一步加速了电动舵机在飞航导弹中的应用。
3.目前,许多电动舵机以无刷直流电机(bldc)作为动力来源,但是无刷直流电机转矩脉动较大,需要减速器对无刷直流电机输出进行减速,这造成了复杂的结构设计,高难度的转配工作,限制了使其在伺服系统中的应用。
技术实现要素:
4.鉴于上述的分析,本发明旨在提供一种外转子永磁同步电机直驱的电动舵机系统;解决直流电机作为电动舵机动力来源带来的问题。
5.本发明公开了一种外转子永磁同步电机直驱的电动舵机系统,包括控制板组件和四路传动机构;
6.所述控制板组件,用于分别控制四路传动机构输出力矩,带动四个独立的受控舵面转动;
7.所述四路传动机构的结构相同;每路传动机构,用于通过永磁同步电机直驱受控舵面;以及,用于采集永磁电机转轴和受控舵面转轴的转动角度,并反馈至所述控制板组件;
8.所述控制板组件,还用于将受控舵面转轴的转动角度转换为对应的角位移信息和角速度信息,将永磁电机转轴的转动角度转换为对应电机的驱动电流信息,对永磁同步电机进行位置、速度、电流三环闭环控制。
9.进一步地,每路传动机构包括永磁同步电机、丝杠、滚珠机构、拨叉、拨叉柱和套筒;
10.永磁同步电机为外转子扁平式永磁同步电机;永磁同步电机的定子及绕组固定在电机安装架的上固定盖板上;电机外转子及磁钢位于电机定子及绕组外部,与电机定子和绕组同轴;
11.所述丝杠固定在磁钢上,与电机外转子同轴;所述丝杠外部套接滚珠机构,所述滚珠机构上固定拨叉,拨叉的指向与丝杠的径向垂直;
12.电机外转子及磁钢带动丝杠转动,滚珠机构将丝杠的转动转换为直线移动,使拨叉沿丝杠的径向直线移动;
13.所述套筒与受控舵面转轴刚性连接,所述拨叉柱设置于套筒上;拨叉柱与拨叉配合,将拨叉的直线移动的力矩转换为转动力矩,带动舵面沿舵面转轴转动。
14.进一步地,所述每路传动机构还包括与丝杠平行的拨叉导轨,所述拨叉导轨与拨叉连接,限定拨叉的移动方向与丝杠平行。
15.进一步地,每路传动机构还包括角度测量组件,采用无接触式磁电传方式分别测量永磁电机转轴和受控舵面转轴的转动角度。
16.进一步地,角度测量组件包括第一角位移传感器和第二角位移传感器;
17.所述第一角位移传感器的第一磁编码器设置于接近磁钢的位置,用于采集电机转动时磁钢的磁场变化,测量电机转轴的转动角度;
18.所述第二角位移传感器包括磁条和第二磁编码器;所述磁条成半圆环布置于套筒的外沿,所述第二磁编码器设置于接近磁条的位置,用于采集受控舵面转动时与舵面转轴一同转动的所述磁条的磁场变化,测量受控舵面转轴的转动角度。
19.进一步地,所述磁条为多极磁栅,包括多个磁极的磁铁,所述第二磁编码器为多极磁编码器;所述第二磁编码器对多极磁栅的每个磁极的测量得到12位精度的位置数据。
20.进一步地,所述控制板组件包括一块主控板和四块驱动板;
21.所述主控板与四块驱动板分别连接;用于进行中断管理,指令数据管理,角位移传感器算法运算,舵机遥测数据的上传,执行舵机故障项实时监测及保护措施;
22.每块驱动板与每路传动机构的永磁同步电机对应,用于采集磁编码器数据、接收主控板的控制量数据,判断永磁同步电机的电气角度,对电机进行驱动和转动控制。
23.进一步地,所述主控板的控制器核心为tms320c28346,搭载rts2800fpu32fast_supplement.lib库;外设xintf配合低电压1553b芯片bu64843,用于进行舵机整机对外的高速串行通讯;外设can配合通讯芯片sn65hvd230,用于与驱动板进行舵面角度指令的发送、舵面机械角度和舵面力矩负载的反馈接收;外设sci配合通讯芯片adm2587e,用于舵机数据的遥测隔离信号传输;外设spi配合数字温度传感器芯片adt7320,实现电气执行效率的温度补偿。
24.进一步地,所述驱动板集成式一体化电机驱动器的处理器stm32f401;外设can配合通讯芯片sn65hvd230,用于与主控板进行舵面角度指令的接收、舵机旋转机械角度和舵面力矩负载的反馈发送;外设spi配合第一磁编码器as5048a进行单极磁编码器的角度信息采集,用于识别电机转子的电气角度,配合第二磁编码器as5311进行多极磁编码器的角度信息采集,采集舵面转轴的转动角度;外设pwm配合drv8313半h桥功率芯片,用于进行电机的功率放大。外设spi配合模数转换芯片ad7124-4采集电阻式的温度和压力传感器;地址拨码开关采用gpio管脚的上下拉,用以区分四个电机的独特的识别id。
25.进一步地,所述驱动板执行电机的foc控制算法:采集电机的电气角度数据、接收控制量数据,进行clark正/逆变换、park正/逆变换、pi控制器、svpwm信号生成。
26.本发明的有益效果如下:
27.本发明利用永磁同步电机作为舵机动力来源,凸显了其功率因数高、转矩/重量比高、易于散热、便于维护保养的优势。
28.采用无接触式磁电传感器:相比传统的电位计方式,省去了运放、模数转换器以及正负直流电源,避免了接触式传感器的磨损;相比传统的旋转变压器省去了交流激励电源、
rdc转换芯片、正负直流电源以及复杂正余弦输出信号接线关系,有效控制了电路的规模,提高了可靠性,减低了成本。
29.采用电机的功率驱动的分散化设计架构,由arm实现永磁同步电机的foc控制算法,控制器dsp负责舵面的pid控制算法,不同处理器的协助工作分担了对方的计算负担,满足了舵机紧凑化、轻质化的需求。
附图说明
30.附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
31.图1为本实施例中的每路传动机构的结构图;
32.图2为本实施例中的电动舵机系统的内部结构详细剖视图;
33.图3为本实施例中的电动舵机系统结构俯视示意图;
34.图4为本实施例中的电动舵机系统结构侧视示意图;
35.图5为本实施例中的多极磁编码器角度转换示意图;
36.图6为本实施例中的电动舵机系统控制板软硬件系统框图;
37.图7为本实施例中的驱动板示意图。
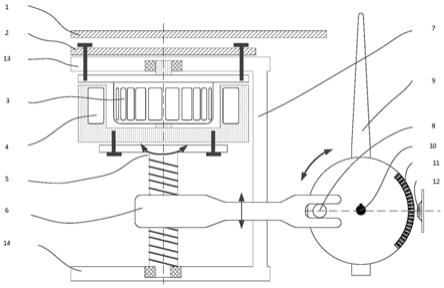
38.附图标记:1—主控板,2—驱动板,3—定子及绕组,4—电机外转子及磁钢,5—丝杠,6—滚珠机构及拨叉,7—拨叉导轨,8—拨叉柱,9—舵面本体,10—舵面转轴,11—磁条,12—第二磁编码器,13—电机安装架的上固定盖板,14—电机安装架的下固定盖板,15—舵机固定机构支架。
具体实施方式
39.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理。
40.本实施例公开了一种外转子永磁同步电机直驱的电动舵机系统,包括控制板和四路传动机构;
41.所述控制板与四路传动机构构成“一控四”结构,分别控制四路传动机构输出力矩,带动四个独立的受控舵面转动;
42.所述四路传动机构的结构相同;每路传动机构通过永磁同步电机直驱受控舵面;并采集永磁电机转轴和受控舵面转轴的转动角度反馈到所述控制板;所述控制板将受控舵面转轴的转动角度转换为对应的角位移信息和角速度信息,将永磁电机转轴的转动角度转换为对应电机的驱动电流信息,对永磁同步电机进行位置、速度、电流三环闭环控制。
43.具体的,如图1所示,每路传动机构包括永磁同步电机、丝杠、滚珠机构、拨叉、拨叉柱和套筒;
44.永磁同步电机为外转子扁平式永磁同步电机;永磁同步电机的定子及绕组固定在电机安装架的上固定盖板的底面;电机外转子及磁钢位于电机定子及绕组外部,与电机定子和绕组同轴;磁钢轴穿过绕组轴心与上固定盖板轴承连接。
45.所述丝杠的一端固定在磁钢上,与电机外转子同轴,另一端通过轴承连接在电机安装架的下固定盖板;所述丝杠外部套接滚珠机构,所述滚珠机构上固定拨叉,拨叉的指向
与丝杠的径向垂直;
46.优选的上固定盖板和下固定盖板之间还包括与丝杠平行的拨叉导轨,所述拨叉导轨与拨叉连接,限定拨叉的移动方向与丝杠平行。
47.具体的连接方式可以是在拨叉本体上设置孔洞,使拨叉导轨从孔洞中穿过,拨叉能够沿导轨的方向自由移动,或者采用其他可以实现限定拨叉的移动方向的连接方式。
48.电机外转子及磁钢带动丝杠转动,滚珠机构将丝杠的转动转换为直线移动,使拨叉沿与丝杠的径向直线移动;
49.所述套筒与受控舵面转轴刚性连接,所述拨叉柱设置于的套筒上;拨叉柱的位置不与受控舵面转轴重合,在受控舵面转轴转动时,拨叉柱围绕受控舵面转轴转动。
50.拨叉柱与拨叉配合,拨叉柱位于拨叉的叉头之中,在拨叉直线移动时,拨叉轴将拨叉的直线移动的力矩转换为转动力矩,带动舵面沿舵面转轴转动。
51.图2为电动舵机系统的内部结构详细剖视图。
52.本实施例的电动舵机系统通过丝杆及拨叉将外转子扁平式永磁同步电机与受控舵面直连,无需减速机构,减小了系统的体积和重量。如图3和4所示并将所述受控舵面直接安装在载体外壳体上,以载体壳体作为舵机的外舱体,这样减小整个电动舵机的体积和重量,符合电动舵机小型化、轻质化、高集成度的设计要求。
53.采用外转子永磁同步电机作为动力输出,借助其功率因数高、转矩脉动较小的优点,在提高舵机的动态性能的同时、减低舵机的体积与重量。图2为方便示意绘制12n14p永磁同步电机。
54.优选的,本实施例采用24n26p扁平外转子永磁同步电机,转子使用的磁极数p=26极,即13个转子磁对级,定子使用的磁极数n=24极,即12个定子磁对级。满足以下:p/2-n/2=1;转子磁极对数p/2为奇数;定子磁极对数n/2为偶数;定子线圈绕组极性对数n/2能被3整除等四个条件,这样有效降低齿槽转矩有效降低电机的起动转矩,同时极对数越多越可有效提升电磁转矩。
55.每路传动机构还包括角度测量组件,采用无接触式磁电传方式分别测量永磁电机转轴和受控舵面转轴的转动角度。
56.具体的,角度测量组件包括第一角位移传感器和第二角位移传感器;
57.所述第一角位移传感器的第一磁编码器设置于接近磁钢的位置,用于采集电机转动时磁钢的磁场变化,测量电机转轴的转动角度;
58.在电机转动时,磁钢内部为单极性径向充磁磁场,因此第一磁编码器采用单极磁编码器;
59.具体的,第一磁编码器采用磁编码器as5048a。
60.所述第二角位移传感器包括磁条和第二磁编码器;所述磁条成半圆环布置于套筒的外沿,所述第二磁编码器设置于接近磁条的位置,用于采集受控舵面转动时与舵面转轴一同转动的所述磁条的磁场变化,测量受控舵面转轴的转动角度。
61.具体的,所述磁条为多极磁栅,包括多个磁极的磁铁,所述第二磁编码器为多极磁编码器;所述第二磁编码器对多极磁栅的每个磁极的测量得到12位精度的位置数据。
62.第二磁性编码器采用磁编码器as5311,多极磁栅旋转中重复出现的磁极位置增量数据,结合增量输出得到更高的分辨率。
63.增量输出分辨率可达到每对极12位,移动速度可高达650mm/s,本设计为直径为60mm的多对极弧形磁环时,分辨率可达16位。
64.如图5所示,多极磁栅在移动的过程中,芯片as5311表面的霍尔元件通过感知磁场移动,输出电角度差为90
°
的正弦和余弦电压信号,正余弦电压信号经过内置前端放大器进行放大并通过模数转换输送到内置处理器中,经过运算可以精确地输出绝对位置信号和增量位置信号。同时也可以通过magincn和magdecn输出磁场强度信息,从而获得芯片与磁条之间的距离信息。芯片as5311用于测量舵面的角度范围为正负30
°
。
65.本实施例的舵机系统,采用单极磁编码器和多对极磁编码器混合式角度测量,利用无接触式磁电传感特性,相比传统的电位计方式,省去了运放、模数转换器以及正负直流电源,避免了接触式传感器的磨损;相比传统的旋转变压器省去了交流激励电源的引入、rdc转换芯片、正负直流电源以及复杂的正余弦输出信号接线关系,有效控制了电路的规模,减低了可靠性及成本。
66.具体的,本实施例的所述控制板组件包括一块主控板和四块驱动板;
67.所述主控板与四块驱动板分别连接;用于进行中断管理,指令数据管理,角位移传感器算法运算,舵机遥测数据的上传,执行舵机故障项实时监测及保护措施;
68.每块驱动板与每路传动机构的永磁同步电机对应,用于采集磁编码器数据、接收主控板的控制量数据,判断永磁同步电机的电气角度,对电机进行驱动和转动控制。
69.优选的,主控板采用一块圆形顶层控制电路板构架;本实施例的主处理器使用ti公司的c2800系列的tms320c28346芯片作为控制器核心,处理器性能比tms320f28335提升两倍、工作频率高达300mhz,并高度集成了256k单周期ram存储器,delfina浮点控制器为高浮点计算需求和先进控制算法提供可能,新增rts2800fpu32fast_supplement.lib库,比传统的rts2800fpu32.lib库运算能力快一倍。外设xintf配合低电压1553b芯片bu64843进行舵机整机对外的高速串行通讯。外设can配合通讯芯片sn65hvd230,与arm进行舵面角度指令的发送、舵面旋转机械角度和舵面力矩负载的反馈接收。外设sci配合通讯芯片adm2587e,实现舵机数据的遥测隔离信号传输。外设spi配合数字温度传感器芯片adt7320,实现电气执行效率的温度补偿。
70.如图6所示,在所述控制板组件中的主控板运行的控制软件实现以下功能:主控板控制器核心处理器在系统中负责中断管理(定时中断、外部1553b中断,can通讯中断,sci通讯中断),指令数据管理(外部指令数据解析、传感器数据接收、控制量数据发送),舵机角位移传感器算法运算,舵机遥测数据(舵机的机构压力、dsp控制器温度、母线电压电流)的上传,执行舵机故障项(机构限位、速度过高、电流超限、温度异常)实时监测及保护措施。控制器温度采集部分,采用的是16位分辨率、超低温漂的数字温度传感器芯片adt7320,采集舵机所处的环境温度,测温范围-20度至+105度。用于软件内部控制参数的比例调节,达到电气执行效率的温度补偿。
71.四块驱动板为有感式永磁同步电机驱动板,驱动板上包括第一磁编码器;每块驱动板分别固定在每路传动机构的电机安装架的上固定盖板的顶面,使驱动板上包括的第一磁编码器与电机外转子及磁钢对应,能够采集磁钢的磁场数据。驱动板集成式一体化电机驱动器的处理器选用st公司的stm32系列的stm32f401芯片,该驱动器封装小、功耗低、外设丰富,适合集成在电机的有限空间内部。外设can配合通讯芯片sn65hvd230,与dsp进行舵面
角度执行指令接收、舵面机械旋转角度和舵面力矩负载的反馈发送。外设spi配合磁编码器芯片as5048a进行单极磁编码器的角度信息采集,用于识别电机转子的电气角度。外设pwm配合drv8313半h桥功率芯片进行电机的功率放大。外设spi配合模数转换芯片ad7124-4采集电阻式的温度和压力传感器,ad7124-4内部自带范围可调节的恒流源,简化了温度和压力传感器的外围电路。驱动器温度采集部分,驱动模块的表面贴有两线制的铂电阻pt1000用于测量功率模块的温度,测温范围-80度~+150度,避免温度过热,造成功率模块烧毁。驱动器力矩采集部分,舵面与连接轴之间贴有两线制的测力应变片bhf1000-3eb,用于测量舵面的负载情况,避免外部负载过大对执行机构及电气部分造成不可逆转的损伤。地址拨码开关采用gpio管脚的上下拉,用以区分四个电机的独特的识别id。
72.如图7所示,在驱动板中运行的软件实现以下功能:驱动板处理器在系统中主要负责电机的foc控制算法:采集电机的电气角度数据、接收控制量数据,clark正/逆变换、park正/逆变换、pi控制器、svpwm信号生成。采用有感式控制方法,在电机驱动板的as5048a,用于判断电机的电气角度,实现电机的顺滑转动。
73.具体的,foc控制算法在驱动器arm处理器中实现,由clarke、park矩阵变换及逆变换,将三相交流电等效成了励磁电流和转矩,使其用两个直流分量来控制无刷电机,再经过矩阵变换、转子的六扇区分布判断、电压的空间矢量合成、七段式svpwm生成等步骤,输出电机转动的三相电压。
74.采用电机的功率驱动的分散化设计架构,由arm实现永磁同步电机的foc控制算法,控制器dsp负责舵面的pid控制算法,不同处理器的协助工作分担了各自的计算负担,满足了舵机紧凑化、轻质化的需求。
75.综上所述,本实施例的外转子永磁同步电机直驱的电动舵机系统,利用永磁同步电机作为舵机动力来源,凸显了其功率因数高、转矩/重量比高、易于散热、便于维护保养的优势。采用无接触式磁电传感器:相比传统的电位计方式,省去了运放、模数转换器以及正负直流电源,避免了接触式传感器的磨损;相比旋转变压器省去了交流激励电源的引入、rdc转换芯片、正负直流电源以及复杂的正余弦输出信号接线关系,有效控制了电路的规模,减低了可靠性及成本。采用电机的功率驱动的分散化设计架构,由arm实现永磁同步电机的foc控制算法,控制器dsp负责舵面的pid控制算法,不同处理器的协助工作分担了对方的计算负担,满足了舵机紧凑化、轻质化的需求。
76.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1