带电作业AI监控指挥装置的制作方法
带电作业ai监控指挥装置
技术领域
[0001]
本发明涉及带电监控技术领域,特别涉及一种带电作业ai监控指挥装置。
背景技术:
[0002]
在供电系统进行高空带电作业时,由于高空及带高压电的特殊性,施工人员具有极大的操作危险性:首先是容易发生误操作,由于没有注意到的操作失误导致送电事故的发生。在点杆塔没有进行断电处理的时候施工人员就进行带电作业,就容易造成触电危险。其次就是带电作业很大一部分都是在高空中完成的,如果作业人员没有做好安全防护措施,一旦失守后果也是很严重的。比如工作人员在点杆塔上移动位置时,如果没有必要的安全防护措施,发生危险的可能性也很大。带电作业存在很多的危险,而现有的系统不能实时对施工人员进行监控指导,来防止作业人员出现在不安全的位置以及实时监控作业人员是否安全的操作,非常不安全。
技术实现要素:
[0003]
本发明要解决的技术问题是提供一种可有效智能监控指挥作业人员的安全情况的带电作业ai监控指挥装置。
[0004]
实现本发明目的的技术方案是提供一种带电作业ai监控指挥装置,包括至少三个定位摄像头、ai计算和控制模块、电源模块、监视装置、麦克风、语音播放装置和警示指示装置;所述至少三个定位摄像头分别安装在绝缘斗臂车的上、中、下三个不同的方位,三个方位上的定位摄像头分别实时拍摄图像并显示在监视装置上,由监护人员选定作业范围和禁止作业范围;所述ai计算和控制模块与定位摄像头之间通过通信连接,ai计算和控制模块通过计算分析定位摄像头拍摄的图像从而控制相关装置是否启动;电源模块与定位摄像头、ai计算和控制模块、监视装置、麦克风、语音播放装置、警示指示装置相连接,配合工作;所述监视装置包括平板、电脑中的至少一种或多种;所述语音播放装置、警示指示装置与ai计算和控制模块通过通信连接,根据接收的指令执行对应动作;带电作业时,所述绝缘斗臂车的上方位的定位摄像头拍摄作业人员作业图像,ai计算和控制模块计算分析作业人员的身体部位是否进入作业平面的禁止作业范围,一旦发现靠近,立即启动语音播放装置和警示指示装置进行警示并语音播报;带电作业时,所述绝缘斗臂车的中方位的定位摄像头拍摄作业人员作业图像,ai计算和控制模块计算分析作业人员身体部位是否进入作业平面下方的禁止作业范围,一旦发现靠近,立即启动语音播放装置和警示指示装置进行警示并语音播报;带电作业时,所述绝缘斗臂车的下方位的定位摄像头拍摄作业人员作业图像,ai计算和控制模块计算分析作业人员的身体部位是否进入了作业平面的禁止作业范围,一旦发现靠近,立即启动语音播放装置和警示指示装置进行警示并语音播报。
[0005]
进一步的,所述麦克风用于监控人员直接语音传送相关警示提示信息于作业人员,所述语音播放装置采用喇叭或无线通讯设备,用于播放系统设置或监控人员发出的警示信息,所述警示指示装置采用发红色闪烁光的警示led灯。
[0006]
进一步的,所述至少三个定位摄像头分别安装在绝缘斗臂车的上、中、下三个不同的方位,绝缘斗臂车上方位的定位摄像头的视角范围组合必须覆盖作业范围和禁止作业范围整个平面,绝缘斗臂车中方位的定位摄像头的视角范围组合必须覆盖两层导线作业时导线间的空间范围,绝缘斗臂车下方位的定位摄像头的视角范围组合必须覆盖作业范围和禁止作业范围整个平面。
[0007]
本发明具有积极的效果:本发明的带电作业ai监控指挥装置在高空进行带电作业时,有ai计算和控制模块根据划定的范围,通过多组摄像头及相应的ai计算和控制模块自动对立体作业过程进行监护,对超过区域范围的作业进行警示并报警。一般在作业范围禁区主要是作业人员进入,而本项目是针对个人身体部分进入的监视,安全性较好,有效智能识别并监控指挥作业人员,极大地保障了作业人员的施工安全。
附图说明
[0008]
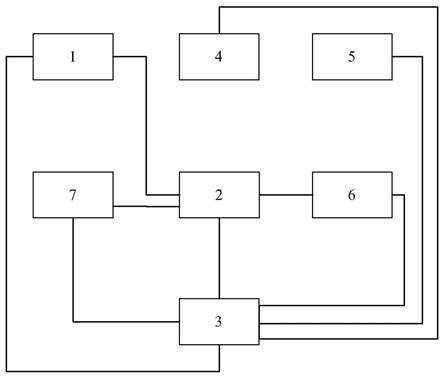
图1为本发明的带电作业ai监控指挥装置的一种框形结构示意图;图2为位于上方位的定位摄像头的俯视示意图;图3为位于下方位的定位摄像头的仰视示意图;图4为位于中方位的定位摄像头的前视示意图。
[0009]
上述附图中的标记如下:定位摄像头1,ai计算和控制模块2,电源模块3,监视装置4,麦克风5,语音播放装置6,警示指示装置7。
具体实施方式
[0010]
(实施例1)见图1,本实施例的一种带电作业ai监控指挥装置,包括至少三个定位摄像头1、ai计算和控制模块2、电源模块3、监视装置4、麦克风5、语音播放装置6和警示指示装置7;所述至少三个定位摄像头1分别安装在绝缘斗臂车的上、中、下三个不同的方位,三个方位上的定位摄像头分别实时拍摄图像并显示在监视装置4上,监护人员选定作业范围和禁止作业范围;所述ai计算和控制模块2采用华为的atlas 500智能小站或算丰的sm5 (sophon sm5) ai计算模组。所述ai计算和控制模块2与定位摄像头1之间通过通信连接,ai计算和控制模块2通过计算分析定位摄像头1拍摄的图像从而控制相关装置是否启动;电源模块3与定位摄像头1、ai计算和控制模块2、监视装置4、麦克风5、语音播放装置6、警示指示装置7相连接,配合工作;所述监视装置4包括平板、电脑中的至少一种或多种;所述语音播放装置6、警示指示装置7与ai计算和控制模块2通过通信连接,根据接收的指令执行对应动作;所述麦克风5用于监控人员直接语音传送相关警示提示信息于作业人员,所述语音播放装置6采用喇叭或无线通讯设备,用于播放系统设置或监控人员发出的警示信息,所述警示指示装置7采用发红色闪烁光的警示led灯。带电作业时,见图2,所述绝缘斗臂车的上方位的定位摄像头1拍摄作业人员作业图像,ai计算和控制模块3计算分析作业人员的身体部位是否进入作业平面的禁止作业范围,一旦发现靠近,立即启动语音播放装置6和警示指示装置7进行警示并语音播报;见图4,带电作业时,所述绝缘斗臂车的中方位的定位摄像头1拍摄作业人员作业图像,ai计算和控制模块2计算分析作业人员身体部位是否进入作业平面下方的禁止作业
范围,一旦发现靠近,立即启动语音播放装置6和警示指示装置7进行警示并语音播报;见图3,带电作业时,所述绝缘斗臂车的下方位的定位摄像头1拍摄作业人员作业图像,ai计算和控制模块2计算分析作业人员的身体部位是否进入了作业平面的禁止作业范围,一旦发现靠近,立即启动语音播放装6置和警示指示装置7进行警示并语音播报。
[0011]
进一步的,所述至少三个定位摄像头1分别安装在绝缘斗臂车的上、中、下三个不同的方位,绝缘斗臂车上方位的定位摄像头1的视角范围组合必须覆盖作业范围和禁止作业范围整个平面,绝缘斗臂车中方位的定位摄像头1的视角范围组合必须覆盖两层导线作业时导线间的空间范围,绝缘斗臂车下方位的定位摄像头1的视角范围组合必须覆盖作业范围和禁止作业范围整个平面,当作业人员身体遮挡了处于相对上方位置的定位摄像头1组合时,处于相对下方位置的定位摄像头1组合拍摄的作业人员图像就起到了判断作业人员身体部位是否进入作业平面的禁止作业范围关键依据。
[0012]
显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而这些属于本发明的精神所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1