一种抑制MMC互联变换器虚拟同步机功率震荡的方法与流程
一种抑制mmc互联变换器虚拟同步机功率震荡的方法
技术领域
1.本发明涉及一种抑制mmc互联变换器虚拟同步机功率震荡的方法,该方法一种抑制混合微电网mmc互联变换器虚拟同步机功率震荡的方法,采用自适应虚拟参数代替传统虚拟参数,增加控制系统对的功率震荡的抑制能力。
背景技术:
2.交直流混合微电网中mmc互联变换器接口变换器通常采用下垂控制,常规下垂控制不具备惯性和阻尼环节,无法维持分布式电源高渗透率,虚拟同步机(virtual synchronous generation,vsg)控制通过模仿同步发电机特性能够为系统提供惯性和阻尼支撑,实现一次调频和一次调压。虚拟同步机暂态变换过程中缓冲能量变化量采用虚拟转动惯量j变化表征,各种摩擦阻力采用虚拟阻尼系数d变化量表征。
3.但常规虚拟转动惯量j为定值,j选值过小,系统响应时间可以减少但无法对功率震荡起到抑制作用;j选值过大,系统可以对功率波动起到抑制作用但增加了响应时间。同理,虚拟阻尼系数d选取也会影响功率震荡抑制性能。
技术实现要素:
4.本发明的目的在于提供一种抑制mmc互联变换器虚拟同步机功率震荡的方法,具体应用自适应虚拟惯量和自适应阻尼系数来抑制混合微电网mmc互联变换器虚拟同步机功率调节过程中的功率震荡问题,通过小信号模型分析额定虚拟参数取值范围。
5.本发明采取如下技术方案来实现的:
6.一种抑制mmc互联变换器虚拟同步机功率震荡的方法,包括以下步骤:
7.1)以交直流混合微电网mmc互联变换器交流侧角度出发,得到电压方程;
8.3)根据步骤1)mmc互联变换器交流侧电压方程,建立mmc互联变换器功率输出方程,并进行化简;
9.3)根据交直流混合微电网mmc互联变换器控制系统中,交流微电网、直流微电网瞬时有功功率变化量相同,建立mmc互联变换器功率调节关系式;
10.4)将步骤3)mmc互联变换器功率调节关系式中交流微电网有功出力分解为稳态功率变化量、瞬时功率变化量,直流微电网下垂控制模型有功出力调节量分解为稳态功率变化量、动态功率变化量;
11.5)根据步骤3)mmc互联变换器功率调节关系式和步骤4)交流微电网、直流微电网有功出力分解式得到基于功率传输原则的虚拟同步机控制机械方程和虚拟同步机无功励磁控制方程;
12.6)根据发生功率震荡时,角频率变化情况,将步骤5)虚拟同步机控制机械方程中的虚拟惯量和虚拟阻尼修改为自适应虚拟惯量和自适应虚拟阻尼系数;
13.7)对步骤2)mmc互联变换器功率输出化简方程中的有功功率求一阶、二阶导数;
14.8)将步骤7)中mmc互联变换器功输出有功功率一阶、二阶导数和步骤4)交流微电
网有功出力分解表达式带入步骤5)基于功率传输原则的虚拟同步机控制机械方程中,得到虚拟同步机参考输出功率表达式;
15.9)对步骤8)中虚拟同步机参考输出功率表达式建立小信号模型并进行拉氏变换,计算其特征根;
16.10)分析步骤9)虚拟同步机参考输出功率小信号模型和其特征根,得到系统自然震荡转速和阻尼比;
17.11)参考同步发电机振荡频率,得到额定虚拟惯量取值范围,在考虑阻尼系数的基础上,利用最优二阶系统分析法,考虑阻尼系数的基础上,设置步骤10)阻尼比和额定阻尼系数;
18.12)根据步骤11)额定虚拟惯量取值范围和阻尼比和额定阻尼系数,设计步骤6)自适应虚拟惯量和自适应虚拟阻尼系数,带入步骤5)基于功率传输原则的虚拟同步机控制机械方程中,起到抑制mmc互联变换器虚拟同步机功率震荡的作用。
19.本发明进一步的改进在于,步骤1)以交直流混合微电网mmc互联变换器交流侧角度出发,得到电压方程,
20.其中:为交流电网电压e0对应的矢量;为mmc互联变换器交流侧电压u
ac
对应的矢量;为交流电网电流i0对应的矢量。
21.本发明进一步的改进在于,步骤2)的具体实现方法为:根据步骤1)mmc互联变换器交流侧电压方程,建立mmc互联变换器功率传输方程:
22.其中:r
f
、x
f
为滤波电路电阻值及感抗;δ为交流电网电压矢量与mmc互联变换器交流侧电压矢量之间的相角差;交流电网电压e0类比于同步电机电枢电动势;mmc互联变换器交流侧电压u
ac
类比于同步电机端电压;在交直流混合微电网mmc互联变换器控制系统中,通过控制δ正负,实现功率双向流动,当δ>0,超前mmc互联变换器运行于逆变模式,功率由直流微电网向交流微电网传输;当δ<0,滞后mmc互联变换器运行于整流模式,功率由交流微电网向直流微电网传输;当δ=0,与同相位,交流微电网、直流微电网之间无功率交换;mmc互联变换器,满足r
f
<<x
f
,对mmc互联变换器功率传输方程进行化简:交流电网电压矢量与mmc互联变换器交流侧电压矢量之间的相角差δ很小,则有:有功功率表示为:
23.本发明进一步的改进在于,步骤3)的具体实现方法为:根据交直流混合微电网mmc
互联变换器控制系统中,交流微电网、直流微电网瞬时有功功率变化量相同,建立mmc互联变换器功率调节关系式:p
acref-p
ac
=p
dc-p
dcref
=δp;
24.其中:p
ac
为交流微电网输出功率实际值;p
acef
为交流微电网输出功率实际值;p
dc
为直流微电网输出功率实际值;p
dcref
为直流微电网输出功率实际值;δp为mmc互联变换器功率调节量。
25.本发明进一步的改进在于,步骤4)的具体实现方法为:将步骤3)mmc互联变换器功率调节关系式中交流微电网有功出力分解为稳态功率变化量、瞬时功率变化量:
26.其中:k
ω
为交流电网下垂调节系数;k
ω
(ω-ω0)是稳态有功变化量;为虚拟转子惯量吸收或者发出的瞬时有功功率,在虚拟同步机控制中为交流频率提供惯性环节;直流微电网下垂控制模型有功出力调节量分解为稳态功率变化量、动态功率变化量:
27.其中:k
udc
为直流电网下垂调节系数;u
dc
为直流母线电压实际值;u
dc0
为直流母线电压初始值;c
dc
为直流侧电容值;k
udc
(u
dc-u
dc0
)是稳态有功变化量,是直流电容的充放电功率,属于动态功率波动。
28.本发明进一步的改进在于,步骤5)的具体实现方法为:根据步骤3)mmc互联变换器功率调节关系式和步骤4)交流微电网、直流微电网有功出力分解式得到基于功率传输原则的虚拟同步机控制机械方程和虚拟同步机无功励磁控制方程
29.其中:j为虚拟转动惯量;为交流微电网侧角频率当前值;为交流微电网侧角频率初始值;d为虚拟阻尼系数;k
udc
为直流微电网下垂调节系数;u
dc
为直流侧母线电压当前值;u
dc0
为直流侧母线电压初始值;c
dc
为直流侧电容值;拟同步机感应内电势由两部分组成:一部分是空载时,虚拟励磁电压对于的空载电动势,一部分是由无功功率偏差产生,虚拟同步机无功励磁控制方程为:e=e0+k
q
(q
ref-q);
30.其中:e为虚拟同步机感应内电势有效值;e0为励磁空载电动势有效值;k
q
为无功电压下垂控制系数;q
ref
为无功功率参考值;q为无功功率当前值;综合虚拟同步机有功频率控制计算得到的虚拟转子角频率和相角差δ,得到交直流混合微电网mmc互联变换器等效交流
输出端口三相电压调制信号为:
31.本发明进一步的改进在于,步骤6)的具体实现方法为:根据发生功率震荡时,角频率变化情况,在角频率增加阶段,增加j同时适当减少d;在角频率减少阶段,减少j同时适当增加d的自适应控制方法;该方法保证系统响应速度,并且加快功率进入稳定状态将步骤5)虚拟同步机控制机械方程中的虚拟惯量和虚拟阻尼修改为自适应虚拟惯量和自适应虚拟阻尼系数:
32.其中:k
j
为虚拟惯量调节系数;j0为额定虚拟转动惯量;ω0为额定机械角频率;k
d
为虚拟阻尼调节系数;d0为额定虚拟阻尼系数;在自适应虚拟同步机控制系统中,虚拟惯量调节系数k
j
表征虚拟转动惯量跟随频率偏差调节的能力,k
d
表征虚拟阻尼系数跟随频率偏差的能力。
33.本发明进一步的改进在于,步骤7)的具体实现方法为:对步骤2)mmc互联变换器功率输出化简方程中的有功功率求一阶、二阶导数:
34.本发明进一步的改进在于,步骤8)的具体实现方法为:将步骤7)中mmc互联变换器功输出有功功率一阶、二阶导数和步骤4)交流微电网有功出力分解表达式带入步骤5)基于功率传输原则的虚拟同步机控制机械方程中,得到虚拟同步机参考输出功率表达式:
35.本发明进一步的改进在于,步骤9)的具体实现方法为:对步骤8)中虚拟同步机参考输出功率表达式建立小信号模型并进行拉氏变换:计算其特征根:
36.步骤10)的具体实现方法为:分析步骤9)虚拟同步机参考输出功率小信号模型和
其特征根,得到系统自然震荡转速和阻尼比:
37.步骤11)的具体实现方法为:参考同步发电机振荡频率:0.628rad/s≤ω
s
≤15.7rad/s,得到额定虚拟惯量取值范围:在考虑阻尼系数的基础上,利用最优二阶系统分析法,考虑阻尼系数的基础上,设置步骤10)阻尼比和额定阻尼系数:
38.步骤12)的具体实现方法为:根据步骤11)额定虚拟惯量取值范围:和阻尼比和额定阻尼系数:设计步骤6)自适应虚拟惯量j和自适应虚拟阻尼系数d,带入步骤5)基于功率传输原则的虚拟同步机控制机械方程中,起到抑制mmc互联变换器虚拟同步机功率震荡的作用。
39.与现有技术相比,本发明至少具有如下有益的技术效果:
40.1.本发明提出一种在角频率增加阶段,增加j同时适当减少d;在角频率减少阶段,减少j同时适当增加d的自适应控制方案,该方案可以保证虚拟同步机响应速度,并且加快功率进入稳定状态。可以有效抑制混合微电网mmc互联变换器虚拟同步机功率震荡。
41.2.本发明采用小信号模型分析得到的额定虚拟惯量、额定阻尼系数取值更为合理。
附图说明
42.图1为mmc互联变换器主电路拓扑图;
43.图2为基于功率传输原则的mmc互联变换器虚拟同步机控制框图;
44.图3为虚拟同步机功率与角频率变化曲线,图3(a)为发生功率震荡时,图3(b)为角频率减少阶段;
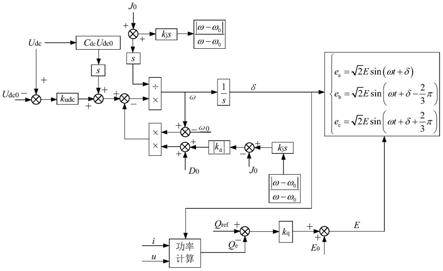
45.图4为自适应虚拟同步机控制框图;
46.图5为mmc互联变换器自适应虚拟同步机控制模型;
47.图6为在0.5s时刻交流微电网负荷增加3kw,1s时刻3kw负荷切除,有功功率动态仿真波形;
48.图7为在0.5s时刻交流微电网负荷增加3kw,1s时刻3kw负荷切除,频率动态仿真波形;
49.图8为在0.5s时刻交流微电网负荷增加3kw,1s时刻3kw负荷切除,自适应虚拟惯量变化曲线仿真波形;
50.图9为在0.5s时刻交流微电网负荷增加3kw,1s时刻3kw负荷切除,自适应阻尼系数变化曲线仿真波形
51.图10为在0.5s时刻直流微电网负荷增加3kw,1s时刻3kw负荷切除,有功功率动态仿真波形;
52.图11为在0.5s时刻直流微电网负荷增加3kw,1s时刻3kw负荷切除,频率动态仿真波形;
53.图12为在0.5s时刻直流微电网负荷增加3kw,1s时刻3kw负荷切除,自适应虚拟惯量变化曲线仿真波形;
54.图13为在0.5s时刻直流微电网负荷增加3kw,1s时刻3kw负荷切除,自适应阻尼系数变化曲线仿真波形。
具体实施方式
55.下面通过附图,对本发明的技术方案做进一步的详细描述。
56.如图1所示,以交直流混合微电网mmc互联变换器交流侧角度出发,交流侧电压方程可表示为:
[0057][0058]
式(1)中:为交流电网电压e0对应的矢量;为mmc互联变换器交流侧电压u
ac
对应的矢量;为交流电网电流i0对应的矢量。mmc互联变换器功率传输方程可表示为:
[0059][0060]
式(2)中:r
f
、x
f
为滤波电路电阻值及感抗;δ为交流电网电压矢量与mmc互联变换器交流侧电压矢量之间的相角差。mmc互联变换器,通常满足r
f
<<x
f
,则式(2)可简化为:
[0061][0062]
式(1)、式(3)所描述mmc互联变换器交流侧电压方程、功率传输方程分别类比于同步电机的电压方程、功率方程。交流电网电压e0类比于同步电机电枢电动势;mmc互联变换器交流侧电压u
ac
类比于同步电机端电压。同步电机根据电枢电动势和端电压相角差的正负,即,可以作为电动机或者发电机。同样,在交直流混合微电网mmc互联变换器控制系统中,通过控制δ正负,实现功率双向流动。当δ>0,超前mmc互联变换器运行于逆变模式,功率由直流微电网向交流微电网传输;当δ<0,滞后mmc互联变换器运行于整流模式,功率由交流微电网向直流微电网传输;当δ=0,与同相位,交流微电网、直流微
电网之间无功率交换。
[0063]
如图2所示,在交直流混合微电网mmc互联变换器控制系统中,交流微电网、直流微电网瞬时有功功率变化量相同,存在:
[0064]
p
acref-p
ac
=p
dc-p
dcref
=δp
ꢀꢀꢀ
(4)
[0065]
式(4)中,p
ac
为交流微电网输出功率实际值;p
acef
为交流微电网输出功率实际值;p
dc
为直流微电网输出功率实际值;p
dcref
为直流微电网输出功率实际值;δp为mmc互联变换器功率调节量。
[0066]
交流微电网中有功出力调节量可表示为:
[0067][0068]
式(5)中:k
ω
为交流电网下垂调节系数;k
ω
(ω-ω0)是稳态有功变化量。为虚拟转子惯量吸收或者发出的瞬时有功功率,在虚拟同步机控制中为交流频率提供惯性环节。
[0069]
直流微电网中有功出力调节量可表示为:
[0070][0071]
式(6)中:k
udc
为直流电网下垂调节系数;u
dc
为直流母线电压实际值;u
dc0
为直流母线电压初始值;c
dc
为直流侧电容值。k
udc
(u
dc-u
dc0
)是稳态有功变化量,是直流电容的充放电功率,属于动态功率波动。
[0072]
基于功率传输原则的虚拟同步机控制机械方程为:
[0073][0074]
式(7)中:j为虚拟转动惯量;为交流微电网侧角频率当前值;为交流微电网侧角频率初始值;d为虚拟阻尼系数;k
udc
为直流微电网下垂调节系数;u
dc
为直流侧母线电压当前值;u
dc0
为直流侧母线电压初始值;。mmc互联变换器虚拟同步机控制中可以通过直接控制交流频率和直流电压实现交直流混合微电网有功功率调节控制,均衡混合微电网有功负荷。
[0075]
虚拟同步机感应内电势由两部分组成:一部分是空载时,虚拟励磁电压对于的空载电动势,一部分是由无功功率偏差产生,虚拟同步机无功励磁控制方程为:
[0076]
e=e0+k
q
(q
ref-q)
ꢀꢀꢀ
(8)
[0077]
式(8)中:e为虚拟同步机感应内电势有效值;e0为励磁空载电动势有效值;k
q
为无功电压下垂控制系数;q
ref
为无功功率参考值;q为无功功率当前值。
[0078]
综合虚拟同步机有功频率控制计算得到的虚拟转子角频率和相角差δ,可以得到交直流混合微电网mmc互联变换器等效交流输出端口三相电压调制信号为:
[0079][0080]
如图3所示,当发生功率震荡时,角频率增加阶段ω>ω0,其中a阶段dω/dt<0,c阶段dω/dt>0,角频率增加阶段需要增加虚拟转动惯量j来约束角频率的增加,以防止ω过快增加从而造成更大超调。角频率减少阶段ω<ω0,其中b阶段dω/dt<0,d阶段dω/dt>0,需要减少虚拟转动惯量j使功率尽快恢复至稳定值。
[0081]
如图4所示,本发明提出一种在角频率增加阶段,增加j同时适当减少d;在角频率减少阶段,减少j同时适当增加d的自适应控制方法。该方法可以保证系统响应速度,并且加快功率进入稳定状态。
[0082]
自适应虚拟惯量和虚拟阻尼系数可表示为:
[0083][0084]
式(10)中:k
j
为虚拟惯量调节系数;j0为额定虚拟转动惯量;ω0为额定机械角频率;k
d
为虚拟阻尼调节系数;d0为额定虚拟阻尼系数。
[0085]
在自适应虚拟同步机控制系统中,虚拟惯量调节系数k
j
表征虚拟转动惯量跟随频率偏差调节的能力,k
d
表征虚拟阻尼系数跟随频率偏差的能力。k
j
、k
d
取值过大会引起虚拟转动惯量和虚拟阻尼比超过其最大值,系统响应速度降低,不利于功率调节控制。所以需要对k
j
、k
d
进行限制,满足自适应虚拟同步机控制系统响应速度要求。因此在选择k
j
、k
d
时,需要充分的综合考虑系统动态性能,以及整体阻尼需求,从而做出灵活选择。
[0086]
为了得到的额定虚拟参数取值范围,需要建立小信号模型。
[0087]
根据式(3)中有功功率表达式,且交流电网电压矢量与mmc互联变换器交流侧电压矢量之间的相角差δ很小,则有:
[0088]
式(3)中有功功率又可以表示为:
[0089][0090]
对上式分别求一阶、二阶导数:
[0091]
[0092]
将式(12)和式(5)带入式(7)中可得:
[0093][0094]
对式(13)建立小信号模型并进行进行拉氏变换可得:
[0095][0096]
特征根为:
[0097][0098]
为了保证控制系统稳定,需要两个特征根都位于复平面的左半部分,又因为虚拟同步机阻尼系数d恒为正,为保证特征根实部为负,需保持虚拟惯量j≥0。在功率震荡过程中,虚拟同步机输出功率响应特性可等效为一个典型的二阶传递函数,根据式(15)可以得到系统自然震荡转速和阻尼比为:
[0099][0100]
参考同步发电机振荡频率:0.628rad/s≤ω
s
≤15.7rad/s,则额定虚拟惯量为:
[0101][0102]
在交直流混合微电网mmc互联变换器虚拟同步机控制系统中,为获得较快响应速度和较少超调量,在考虑阻尼系数的基础上,利用最优二阶系统分析法,取阻尼比和额定阻尼系数为:
[0103][0104]
如图5所示,为了验证本文所提交直流混合微电网mmc互联变换器自适应虚拟同步机控制的有效性,交直流混合微电网仿真模型采用matlab/simulink计算机仿真平台搭建模型,mmc互联变换器自适应虚拟同步机控制原理为:首先通过获取交流侧的母线电压与电流值,接着经过功率计算环节获取mmc互联变换器实际产生有功功率p与实际产生的无功功率q,然后将功率作为参考信号,送至自适应虚拟同步机控制系统中,自适应虚拟同步机控制输出电压矢量,通过驱动电路控制mmc互联变换器内的igbt导通、关断。仿真参数如下表:
[0105]
表4-1仿真参数
[0106][0107][0108]
如图6所示,mmc互联变换器工作于逆变模式,0.5s时刻,功率由mmc互联变换器从直流侧向交流侧传输,交流微电网负荷增加3kw,mmc互联变换器流过+3kw有功功率,mmc互联变换器逆变工作状态输出有功功率上升,采用常规虚拟同步机控制得到的响应功率出现大范围向上波动,且峰值较高,功率震荡严重,而采用本文所提自适应虚拟参数虚拟同步机控制得到的响应功率波形波动减少很多,峰值相应减少,可更快稳定至功率目标值,解决了功率震荡问题。1s时刻,3kw负荷切除,采用常规虚拟同步机控制得到的响应功率出现大范围向下波动,功率震荡严重,极易造成设备脱网,而采用本文所提自适应虚拟参数虚拟同步机控制得到的响应输出功率波形更为平滑,输出功率波形几乎无超调,很快稳定至目标功率,功率震荡趋近于0,调节时间进一步缩短,更适用于交直流混合微电网mmc互联变换器功率控制中。
[0109]
如图7所示,0.5s时刻,当交流微电网负荷增加3kw,交流频率下降响应负荷增加,且频率调节波动明显,采用本文所提自适虚拟同步机控制频率能够稳定至目标值。1s时刻交流微电网3kw负荷切除,能够很快稳定至目标值。
[0110]
如图8所示,本文所提自适应虚拟惯量j可以随mmc互联变换器功率变换而自适应调节,功率波动偏差增大,j相应增大;功率波动偏差减小,j相应减小。自适应虚拟惯量调节
具有连续光滑特性,可以减少交直流混合微电网mmc互联变换器功率调节过程中的功率震荡问题,加快功率稳定至目标值,有效提高了混合微电网的暂态稳定性能。
[0111]
如图9所示,自适应阻尼系数可以随mmc互联变换器功率变换而自适应调节,功率波动偏差增大,阻尼系数相应增大;功率波动偏差减小,阻尼系数相应减小。自适应阻尼系数调节具有连续光滑特性,可同时满足有功功率和频率超调较小的要求。
[0112]
如图9所示,mmc互联变换器工作于整理模式,0.5s时刻,直流微电网负荷增加3kw,功率由mmc互联变换器从交流侧向直流侧传输,mmc互联变换器整理工作状态输出有功功率下降,采用常规虚拟同步机控制得到的响应功率出现大范围向下波动,波动范围较大,功率震荡严重,极易造成微电网内部设备脱网。而采用本文所提自适应虚拟参数虚拟同步机控制得到的响应功率波形波动减少很多,波动得到了很好的控制,可更快稳定至功率目标值,解决了功率震荡问题。1s时刻,3kw负荷切除,虚拟同步机响应负荷变化,输出功率上升,采用常规虚拟同步机控制得到的响应功率出现大范围向上波动,峰值较高且功率震荡严重,而采用本文所提自适应虚拟参数虚拟同步机控制得到的响应输出功率波形更为平滑,输出功率波形几乎无超调,很快稳定至目标功率,功率震荡趋近于0,调节时间进一步缩短,更适用于mmc互联变换器功率调节控制系统中。
[0113]
如图10所示,0.5s时刻,当直流微电网负荷增加5kw,采用传统虚拟同步机控制频率调节波动明显,采用本文所提自适虚拟同步机控制的频率较为缓慢过渡稳定值,避免频率瞬时跌落而产生的换流器逆变失败。1s时刻直流微电网3kw负荷切除,采用常规虚拟同步机控制的频率响应明显较长,1.2s才能稳定,频率调节过程中快速的恢复且稳定至目标值。
[0114]
如图11所示,mmc互联变换器工作于整流状态时,自适应虚拟惯量j可以随mmc互联变换器功率变换而自适应调节,功率波动偏差增大,j相应增大;功率波动偏差减小,j相应减小。自适应虚拟惯量调节具有连续光滑特性,可以减少交直流混合微电网mmc互联变换器功率调节过程中的功率震荡问题。
[0115]
如图12所示,mmc互联变换器工作于整流状态时,自适应阻尼系数可以随mmc互联变换器功率变换而自适应调节,功率波动偏差增大,阻尼系数相应增大;功率波动偏差减小,阻尼系数相应减小。自适应阻尼系数调节具有连续光滑特性,可同时满足有功功率和频率超调较小的要求。
[0116]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何限制,凡是根据本发明技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本发明技术方案的保护范围内。图2为基于功率传输原则的mmc互联变换器虚拟同步机控制框图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1