电动致动器的制作方法
1.本实用新型涉及一种电动致动器。
背景技术:
2.已知有在外壳的内部收容有电子零件的电动致动器。例如在专利文献1 中记载有收容有电容器等作为电子零件的马达装置。
3.[现有技术文献]
[0004]
[专利文献]
[0005]
[专利文献1]日本专利特开2018
‑
7420号公报
技术实现要素:
[0006]
[实用新型所要解决的问题]
[0007]
在电动致动器中电子零件较大的情况下,为了将电子零件收容在外壳的内部,需要使外壳较大。因此,有时电动致动器整体会大型化。
[0008]
本实用新型鉴于所述情况,且目的之一在于提供一种具有可抑制大型化的结构的电动致动器。
[0009]
[解决问题的技术手段]
[0010]
本实用新型的电动致动器的一个实施例包括:马达部;减速机构,与所述马达部连结;电路基板,板面朝向规定方向;电子零件,安装在所述电路基板中的所述规定方向的其中一侧的面;以及外壳,收容所述马达部、所述减速机构、所述电路基板及所述电子零件。所述外壳具有自所述规定方向的其中一侧覆盖所述电路基板及所述电子零件的罩部。所述罩部具有自所述规定方向的另一侧的面向所述规定方向的其中一侧凹陷的凹部。所述凹部在所述规定方向与所述电子零件相向。在所述规定方向观察时,所述凹部的外缘包围所述电子零件的周围。所述罩部中设置有所述凹部的部分的所述规定方向的尺寸比所述罩部中未设置所述凹部的部分的所述规定方向的尺寸小。
[0011]
[实用新型的效果]
[0012]
根据本实用新型的一个实施例,可抑制电动致动器大型化。
附图说明
[0013]
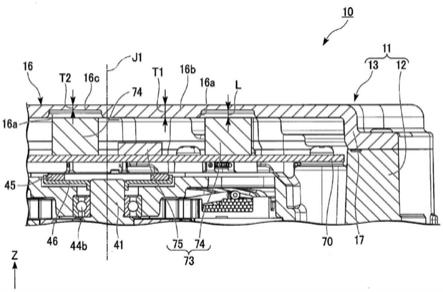
图1是表示本实施方式的电动致动器的剖面图。
[0014]
图2是表示本实施方式的电动致动器的一部分的剖面图。
[0015]
图3是自上侧观察本实施方式的电动致动器的图。
[0016]
图4是表示本实施方式的电容器的立体图。
[0017]
[附图标记说明]
[0018]
10:电动致动器
[0019]
11:外壳
[0020]
16:罩部
[0021]
16a:凹部
[0022]
40:马达部
[0023]
41:马达轴
[0024]
50:减速机构
[0025]
60:输出部
[0026]
61:输出轴
[0027]
70:电路基板
[0028]
73:电子零件
[0029]
74:电容器
[0030]
74a:防爆阀
[0031]
z:轴向(规定方向)
具体实施方式
[0032]
在各图中,z轴方向是以正侧为上侧、以负侧为下侧的上下方向。各图中适宜示出的虚拟轴、即中心轴j1的轴向与z轴方向、即上下方向平行。在以下的说明中,将与中心轴j1的轴向平行的方向简称为“轴向z”。另外,只要无特别说明,则将以中心轴j1为中心的径向简称为“径向”,将以中心轴j1为中心的周向简称为“周向”。
[0033]
在本实施方式中,轴向z相当于规定方向。上侧相当于规定方向的其中一侧,下侧相当于规定方向的另一侧。在本实施方式中,所谓俯视,是指沿着轴向z自上侧或下侧观察。再者,所谓上下方向、上侧及下侧仅是用于说明各部分的相对位置关系的名称,且实际的配置关系等也可为这些名称所表示的配置关系等以外的配置关系等。
[0034]
图1所示的本实施方式的电动致动器10被安装在车辆中。更详细而言,电动致动器10搭载在基于车辆驾驶员的换挡操作而受到驱动的线控换挡 (shift
‑
by
‑
wire)方式的致动器装置。如图1所示,电动致动器10包括:马达部40、减速机构50、输出部60、外壳11、汇流条单元90、电路基板70、马达部传感器71、以及输出部传感器72。另外,如图2所示,电动致动器 10包括电子零件73。
[0035]
如图1所示,马达部40具有:马达轴41、第一轴承44a、第二轴承44b、第三轴承44c、第四轴承44d、转子主体42、定子43、马达部用传感器磁铁 45、以及磁铁保持器46。马达轴41在轴向z延伸。
[0036]
第一轴承44a、第二轴承44b、第三轴承44c及第四轴承44d以绕中心轴 j1可旋转的方式支撑马达轴41。在本实施方式中,第一轴承44a、第二轴承 44b、第三轴承44c及第四轴承44d例如为滚珠轴承。
[0037]
马达轴41中由第三轴承44c支撑的部分、即偏心轴部41a是以与中心轴 j1平行且相对于中心轴j1偏心的偏心轴j2为中心而延伸的圆柱状。马达轴 41中偏心轴部41a以外的部分是以中心轴j1为中心而延伸的圆柱状。
[0038]
转子主体42固定在马达轴41。转子主体42包括:转子铁芯,固定在马达轴41;以及转子磁铁,固定在转子铁芯的外周部。
[0039]
定子43在转子主体42的径向外侧隔开间隙地配置。定子43是包围转子主体42的径
向外侧的环状。定子43例如包括定子铁芯、多个绝缘体、以及多个线圈。各线圈经由绝缘体装配在定子铁芯的齿。
[0040]
磁铁保持器46是以中心轴j1为中心的圆环状。磁铁保持器46固定在马达轴41的上侧的端部中的外周面。马达部用传感器磁铁45是以中心轴j1为中心的圆环板状。马达部用传感器磁铁45的板面与轴向z正交。马达部用传感器磁铁45固定在磁铁保持器46的上表面中的径向外周缘部。由此,马达部用传感器磁铁45经由磁铁保持器46安装在马达轴41。在本实施方式中,马达部用传感器磁铁45在轴向z与电路基板70的下侧的面隔开间隙相向。
[0041]
减速机构50与马达部40连结。在本实施方式中,减速机构50与马达轴 41的下侧连结。减速机构50配置在转子主体42及定子43的下侧。减速机构50具有外齿齿轮51、内齿齿轮52、以及输出齿轮53。再者,减速机构50 也可以与马达轴41的上侧连结。
[0042]
外齿齿轮51是以偏心轴部41a的偏心轴j2为中心且在偏心轴j2的径向扩大的圆环板状。在外齿齿轮51的径向外侧面设置有齿轮部。外齿齿轮51 经由第三轴承44c而与马达轴41连接。由此,减速机构50与马达轴41连结。外齿齿轮51自径向外侧被嵌合在第三轴承44c的外圈。由此,第三轴承44c 以绕偏心轴j2可相对旋转的方式连结马达轴41与外齿齿轮51。
[0043]
外齿齿轮51具有在轴向z贯通外齿齿轮51的多个孔51a。虽然省略了图示,但多个孔51a沿着以偏心轴j2为中心的周向在一周以等间隔配置。孔 51a的沿着轴向z观察到的形状为圆形状。
[0044]
内齿齿轮52包围外齿齿轮51的径向外侧。内齿齿轮52的齿轮部与外齿齿轮51的齿轮部啮合。内齿齿轮52是以中心轴j1为中心的圆环状。内齿齿轮52的外周部例如设为正十二边形等多边形状,以旋转停止的状态固定在后述的第二盖构件14。
[0045]
输出齿轮53具有输出齿轮主体53a及多个销53b。输出齿轮主体53a配置在外齿齿轮51及内齿齿轮52的上侧。输出齿轮主体53a是以中心轴j1为中心且在径向扩大的圆环板状。在输出齿轮主体53a的径向外侧面设置有齿轮部。输出齿轮主体53a经由第四轴承44d而与马达轴41连接。
[0046]
多个销53b是自输出齿轮主体53a的下表面向下侧突出的圆筒状。虽然省略了图示,但多个销53b沿着周向在一周以等间隔配置。销53b的外径比孔51a的内径小。多个销53b自上侧分别穿过多个孔51a。销53b的外周面与孔51a的内周面内接。孔51a的内周面经由销53b,以绕中心轴j1可摆动的方式支撑外齿齿轮51。
[0047]
输出部60是输出电动致动器10的驱动力的部分。输出部60配置在马达部40的径向外侧。输出部60具有输出轴61、驱动齿轮62、输出部用传感器磁铁63、以及磁铁保持器64。
[0048]
输出轴61是在轴向z延伸的筒状。如此,由于输出轴61在与马达轴41 相同的方向延伸,因此可简化将马达轴41的旋转传递至输出轴61的减速机构50的结构。输出轴61经由减速机构50而与马达轴41连结。在本实施方式中,输出轴61是以输出中心轴j3为中心的圆筒状。输出中心轴j3与中心轴j1平行,且自中心轴j1在径向分离配置。即,马达轴41与输出轴61在马达轴41的径向分离配置。因此,和在轴向z排列配置马达轴41与输出轴 61的情况相比,可使电动致动器10在轴向z实现小型化。再者,也可以在轴向z排列配置马达轴41与输出轴61。
[0049]
输出轴61在下侧开口。输出轴61在内周面具有花键槽。输出轴61在马达轴41的径
向配置在与转子主体42重叠的位置。自下侧将从动轴ds插入至输出轴61而加以连结。更详细而言,通过将设置在从动轴ds的外周面的花键部嵌合到设置在输出轴61的内周面的花键槽,输出轴61与从动轴ds 连结。经由输出轴61向从动轴ds传递电动致动器10的驱动力。由此,电动致动器10使从动轴ds绕输出中心轴j3旋转。
[0050]
驱动齿轮62固定在输出轴61且与输出齿轮53啮合。在本实施方式中,驱动齿轮62固定在输出轴61的外周面。驱动齿轮62自输出轴61朝向输出齿轮53延伸。虽然省略了图示,但驱动齿轮62在俯视时为扇形的齿轮。驱动齿轮62在输出齿轮53侧的端部具有齿轮部。驱动齿轮62的齿轮部与输出齿轮53的齿轮部啮合。
[0051]
磁铁保持器64是以输出中心轴j3为中心且在轴向z延伸的大致圆筒状的构件。磁铁保持器64在轴向两侧开口。磁铁保持器64固定在输出轴61的上部。在本实施方式的情况下,磁铁保持器64配置在马达部40的第二轴承 44b的径向外侧。在轴向z观察时,磁铁保持器64与电路基板70部分重叠。磁铁保持器64相较于电路基板70而言配置在更下侧。输出轴61在轴向z贯通磁铁保持器64。输出轴61被压入至磁铁保持器64的内侧。
[0052]
输出部用传感器磁铁63是以输出中心轴j3为中心的圆环状。输出部用传感器磁铁63固定在磁铁保持器64的上表面的外周部。通过将磁铁保持器 64固定在输出轴61,输出部用传感器磁铁63经由磁铁保持器64固定在输出轴61。输出部用传感器磁铁63与电路基板70的下侧的面隔着间隙相向。
[0053]
输出轴61的上端部向磁铁保持器64的上侧突出。输出轴61的上端部通过电路基板70的侧端面且相较于电路基板70而言向更上侧突出。在输出轴61的上端部设置有可嵌合工具的操作部op。操作部op例如为沿着输出中心轴j3延伸的四方柱状或六方柱状。
[0054]
在马达轴41绕中心轴j1旋转时,偏心轴部41a以中心轴j1为中心在周向进行公转。偏心轴部41a的公转经由第三轴承44c传递至外齿齿轮51,外齿齿轮51在孔51a的内周面与销53b的外周面的内接位置发生变化的同时进行摆动。由此,外齿齿轮51的齿轮部与内齿齿轮52的齿轮部的啮合位置在周向发生变化。因此,马达轴41的旋转力经由外齿齿轮51被传递至内齿齿轮52。
[0055]
此处,在本实施方式中,由于内齿齿轮52被固定,因此不旋转。因此,通过传递至内齿齿轮52的旋转力的反作用力,外齿齿轮51绕偏心轴j2旋转。此时,外齿齿轮51的旋转的方向与马达轴41的旋转的方向为相反方向。外齿齿轮51的绕偏心轴j2的旋转经由孔51a与销53b传递至输出齿轮53。由此,输出齿轮53绕中心轴j1旋转。马达轴41的旋转减速并被传递至输出齿轮53。
[0056]
在输出齿轮53旋转时,与输出齿轮53啮合的驱动齿轮62绕输出中心轴 j3旋转。由此,固定在驱动齿轮62的输出轴61绕输出中心轴j3旋转。如此,马达部40的旋转经由减速机构50传递至输出部60。
[0057]
汇流条单元90位于定子43的上侧。汇流条单元90配置在外壳11中的后述的划分壁32a的上表面。汇流条单元90具有:圆环板状的汇流条保持器 91、以及由汇流条保持器91保持的多个汇流条92。例如设置有六根汇流条 92。在本实施方式的情况下,通过将汇流条92作为嵌入构件的嵌入成形来制作汇流条保持器91。
[0058]
汇流条92的其中一侧的端部92a自汇流条保持器91的上表面向上侧突出。在本实施方式中,汇流条92的其中一侧的端部92a是在轴向z延伸的笔直的带状,且自下侧向上侧
贯通电路基板70。端部92a在贯通电路基板70 的位置,通过焊接、熔接、压入等连接方法与电路基板70电连接。虽然省略了图示,但汇流条92的另一侧的端部握持自定子43的线圈引出的线圈引出线,并通过焊接或熔接而与线圈连接。由此,定子43与电路基板70经由汇流条92电连接。
[0059]
在本实施方式中,电路基板70配置在马达部40及汇流条单元90的上侧。电路基板70位于马达轴41的上侧。电路基板70是板面朝向轴向z的板状。电路基板70的板面例如与轴向z正交。虽然省略了图示,但电路基板70的沿着轴向z观察到的形状为大致正方形状。电路基板70经由汇流条单元90 而与定子43的线圈电连接。即,电路基板70与马达部40电连接。
[0060]
如图2所示,电子零件73安装在电路基板70中的上侧的面。在本实施方式中,设置有多个电子零件73。在本实施方式中,电子零件73包括电容器74及晶体管75。虽然省略了图示,但设置有多个晶体管75。多个晶体管 75例如构成逆变器电路,所述逆变器电路控制对马达部40供给的电力。
[0061]
在本实施方式中,设置有多个电容器74。如图3所示,例如设置有4个电容器74。如图4所示,在本实施方式中,电容器74是在上侧的面具有防爆阀74a的电解电容器。防爆阀74a是在电容器74的内部的压力比规定的值高时打开且可释放电容器74的内部的压力的阀。电容器74是在轴向z延伸的圆柱状。如图2所示,电容器74的上侧的端部相较于晶体管75而言位于更上侧。再者,在图1中省略了电子零件73的图示。
[0062]
如图1所示,马达部传感器71固定在电路基板70的下表面。更详细而言,马达部传感器71固定在电路基板70的下侧的面中与马达部用传感器磁铁45在轴向z隔开间隙相向的部分。马达部传感器71是检测马达部用传感器磁铁45的磁场的磁性传感器。马达部传感器71例如为霍尔集成电路 (integrated circuit,ic)等的霍尔元件。在本实施方式中,沿着周向设置有三个马达部传感器71。马达部传感器71通过检测马达部用传感器磁铁45的磁场来检测马达部用传感器磁铁45的旋转位置,并检测马达轴41的旋转。
[0063]
输出部传感器72固定在电路基板70的下表面。更详细而言,输出部传感器72固定在电路基板70的下侧的面中与输出部用传感器磁铁63在轴向z 隔开间隙相向的部分。输出部传感器72是检测输出部用传感器磁铁63的磁场的磁性传感器。输出部传感器72例如为霍尔ic等的霍尔元件。输出部传感器72通过检测输出部用传感器磁铁63的磁场来检测输出部用传感器磁铁 63的旋转位置,并检测输出轴61的旋转。
[0064]
外壳11收容马达部40、减速机构50、输出部60、电路基板70、电子零件73、以及汇流条单元90。外壳11具有:外壳主体12,在上侧开口且在俯视时为多边形状;第一盖构件13,固定在外壳主体12的上侧的开口部12a;以及第二盖构件14,固定在外壳主体12的下侧的开口部12b。
[0065]
外壳主体12具有:角筒状的外壁部30,构成电动致动器10的框体;底壁部31,自外壁部30的下侧的端部向径向内侧扩大;以及设置在底壁部31 的马达壳体部32及输出轴保持部33。即,外壳11具有外壁部30、底壁部 31、马达壳体部32、以及输出轴保持部33。
[0066]
在本实施方式中,在轴向z观察时,外壁部30为五边形的角筒状。外壁部30自径向外侧包围马达壳体部32。外壁部30的上侧的开口部是外壳主体 12的上侧的开口部12a。在开口部12a的内侧收容有电路基板70。
[0067]
底壁部31具有在下侧开口的开口部。在底壁部31的开口部的周缘设置有自底壁部
31向下侧突出的筒状的筒状壁31a。由筒状壁31a包围的开口部是外壳主体12的下侧的开口部12b。马达壳体部32及输出轴保持部33设置在底壁部31的上表面。
[0068]
马达壳体部32是自径向外侧包围马达部40的筒状。在本实施方式中,马达壳体部32是以中心轴j1为中心且在下侧开口的圆筒状。马达壳体部32 将马达部40保持在内侧。更详细而言,马达部40的定子43固定在马达壳体部32的内周面。马达壳体部32具有:筒状部32b,自底壁部31向上侧延伸;以及圆环板状的划分壁32a,自筒状部32b的上侧的端部向径向内侧扩大。
[0069]
划分壁32a位于定子43与汇流条单元90的轴向z之间。划分壁32a在自轴向z观察的中央具有轴承保持部32c。轴承保持部32c是沿着轴向z延伸的圆筒状。第二轴承44b被保持在轴承保持部32c的内周面。通过使划分壁32a兼作轴承保持器,可抑制电动致动器10在轴向z大型化。
[0070]
通过多个螺栓96将电路基板70固定在划分壁32a。螺栓96自电路基板 70的上侧在轴向z贯通电路基板70与汇流条保持器91,并紧固在划分壁32a 的螺钉孔。根据所述结构,利用共用的螺栓96共同紧固电路基板70与汇流条保持器91,从而实现一体化。由此,可抑制由于运作时的振动而导致电路基板70与汇流条保持器91在轴向z的间隔发生变动。结果,可抑制对汇流条92与电路基板70的连接部分施加负荷。例如设置有三个螺栓96。
[0071]
另外,在本实施方式中,和使用不同的螺栓将汇流条保持器91与电路基板70固定在划分壁32a的情况相比,可缩小汇流条保持器91与电路基板70 在轴向z的间隔。因此,可抑制由设置汇流条保持器91导致的电动致动器10的大型化。
[0072]
输出轴保持部33是自底壁部31向上侧延伸的圆筒状。输出轴保持部33 的侧面的一部分与马达壳体部32的侧面联接。输出轴保持部33具有在轴向 z贯通输出轴保持部33的孔部33a。圆筒状的衬套65被嵌合在孔部33a的内侧。
[0073]
衬套65在下侧的端部具有向以输出中心轴j3为中心的径向的外侧突出的凸缘部。由驱动齿轮62的上表面自下侧支撑衬套65的凸缘部。输出轴61 被嵌合在衬套65的内侧。衬套65以绕输出中心轴j3可旋转的方式支撑输出轴61。
[0074]
第一盖构件13是在下侧开口的容器状的金属构件。第一盖构件13例如由压铸件制作。第一盖构件13自上侧覆盖电路基板70及电子零件73。利用在轴向z贯通第一盖构件13的多个螺栓来紧固第一盖构件13与外壳主体12。如图1及图2所示,在第一盖构件13的内部收容有封装在电路基板70的上表面的电子零件73及操作部op。
[0075]
第一盖构件13具有罩部16及周壁部17。即,外壳11具有:罩部16,在径向扩大;以及周壁部17,自罩部16的径向外周缘部向下侧突出。将周壁部17的下侧的端部与外壳主体12的外壁部30中的上侧的端部固定。
[0076]
如图2所示,罩部16自上侧覆盖电路基板70及电子零件73。罩部16 是板面朝向轴向z的板状。罩部16具有自下侧的面向上侧凹陷的凹部16a。在本实施方式中,设置有多个凹部16a。如图3所示,例如设置有四个凹部 16a。例如在轴向z观察时,凹部16a为圆形状。四个凹部16a中两个凹部16a 的一部分彼此联接。其他两个凹部16a分别隔开间隔配置在一部分彼此联接的两个凹部16a。
[0077]
如图2所示,凹部16a与电子零件73在轴向z相向。在本实施方式中,多个凹部16a各自与彼此不同的电子零件73在轴向z相向。在本实施方式中,与凹部16a在轴向z相向的电子
零件73是电容器74。四个凹部16a各自与四个电容器74各自在轴向z相向。
[0078]
在本实施方式中,在凹部16a与电容器74之间设置有间隙。即,在本实施方式中,凹部16a与电子零件73隔着间隙在轴向z相向。更详细而言,凹部16a的底面与电容器74的上侧的面隔着间隙在轴向z相向。即,凹部16a 的底面与设置在电容器74的上侧的面的防爆阀74a隔着间隙在轴向z相向。凹部16a的底面与电容器74的上表面之间的在轴向z的距离l例如为2mm 以上。在本实施方式中,电容器74的上侧的面在轴向z配置在与罩部16的下侧的面中未设置凹部16a的部分大致相同的位置。再者,电容器74的上侧的端部也可以插入至凹部16a的内部。
[0079]
如图3所示,凹部16a的内径d1比电容器74的外径d2大。凹部16a 的内径d1与电容器74的外径d2的差例如为4mm以上。在轴向z观察时,凹部16a的外缘包围电容器74的周围。电容器74的外周面在电容器74的径向例如自凹部16a的外缘起向内侧分离2mm以上配置。由此,即使在电容器74的上侧的端部插入至凹部16a的情况下,也可以适当地抑制电容器74 的外周面与凹部16a的内周面接触。
[0080]
如图2所示,罩部16具有厚壁部16b及薄壁部16c。厚壁部16b是罩部 16中未设置凹部16a的部分。换句话说,厚壁部16b是罩部16中在轴向z 观察时与凹部16a不重叠的部分。薄壁部16c是罩部16中设置有凹部16a的部分。换句话说,薄壁部16c是罩部16中在轴向z观察时与凹部16a重叠的部分。如图3所示,针对每个凹部16a设置薄壁部16c。
[0081]
如图2所示,薄壁部16c在轴向z的尺寸t2比厚壁部16b在轴向z的尺寸t1小。即,罩部16中设置有凹部16a的部分在轴向z的尺寸t2比罩部16中未设置凹部16a的部分在轴向z的尺寸t1小。薄壁部16c在轴向z 的尺寸t2例如为厚壁部16b在轴向z的尺寸t1的一半以下。
[0082]
薄壁部16c中的上侧的面与厚壁部16b中的上侧的面平坦地联接。即,罩部16中设置有凹部16a的部分中的上侧的面与罩部16中未设置凹部16a 的部分中的上侧的面平坦地联接。
[0083]
再者,在本说明书中,所谓“某面彼此平坦地联接”是只要某面彼此无阶差地联接即可,某面彼此各自在整体上也可并非为平坦的面。即,在本说明书中,所谓“某面彼此平坦地联接”是即使在某面彼此各自具有不平坦的部分的情况下,只要在某面彼此联接的部分中平坦且某面彼此无阶差地联接即可。
[0084]
在本实施方式中,薄壁部16c中的上侧的面与厚壁部16b中的上侧的面无阶差地联接。薄壁部16c中的上侧的面例如为在整体上与轴向z正交的平坦的面。厚壁部16b中的上侧的面例如为几乎在整体上与轴向z正交的平坦的面。罩部16的上侧的面例如为几乎在整体上与轴向z正交的平坦的面。
[0085]
如图1所示,第一盖构件13具有位于输出轴61的上侧的开口部13c。在本实施方式中,开口部13c设置在罩部16。在开口部13c安装有可拆卸的帽 (cap)15。例如通过将设置在外周面的外螺纹部与设置在开口部13c的内周面的内螺纹部拧紧,而将帽15安装在开口部13c。通过拆卸帽15,可经由开口部13c将工具自电动致动器10的外部连接至操作部op。
[0086]
第二盖构件14自下侧覆盖减速机构50。在本实施方式中,第二盖构件 14由金属制成。第二盖构件14具有:圆筒状的内侧筒部14a,以中心轴j1 为中心;角筒状的外侧筒部14b,以中心轴j1为中心;固定筒部14c,固定在外壳主体12;底壁部14d,位于内侧筒部14a的下侧的端部;以及开口部 14e,与输出部60在轴向z重叠。
[0087]
内侧筒部14a的内径比外侧筒部14b的内径小,且相较于外侧筒部14b 而言位于更下侧。第一轴承44a被保持在内侧筒部14a的径向内侧。在第一轴承44a与底壁部14d的轴向z之间配置有预压构件47。即,电动致动器10 包括预压构件47。预压构件47是沿着周向延伸的圆环状的波形垫圈。预压构件47与底壁部14d的上侧的面及第一轴承44a的外圈的下侧的端部接触。预压构件47对第一轴承44a的外圈施加向上的预压。
[0088]
内齿齿轮52被保持在外侧筒部14b的径向内侧。固定筒部14c固定在外壳主体12的筒状壁31a的外周面。由此,将第二盖构件14固定在外壳主体 12。第二盖构件14自下侧支撑自输出轴61的外周面向径向外侧扩大的轴凸缘部61b。输出轴61的下侧的端部通过第二盖构件14的开口部14e在下侧露出。
[0089]
根据本实施方式,设置在罩部16的凹部16a与电子零件73在轴向z相向,在轴向z观察时,凹部16a的外缘包围电子零件73的周围。因此,可通过凹部16a避开电子零件73的上侧的端部。由此,可在不使罩部16整体在轴向z的位置向上侧移动的情况下将电子零件73适当地收容在外壳11的内部。因此,可抑制外壳11在轴向z大型化,且可抑制电动致动器10大型化。
[0090]
另外,根据本实施方式,罩部16中设置有凹部16a的部分在轴向z的尺寸t2比罩部16中未设置凹部16a的部分在轴向z的尺寸t1小。因此,和罩部16中设置有凹部16a的部分在轴向z的尺寸t2与罩部16中未设置凹部 16a的部分在轴向z的尺寸t1相同的情况相比,可抑制罩部16中设置有凹部16a的部分向上侧突出。即,在本实施方式中,可抑制薄壁部16c相对于厚壁部16b向上侧突出。由此,即使设置凹部16a,也可抑制罩部16在轴向 z的尺寸大型化。因此,可进一步抑制外壳11在轴向z大型化,且可进一步抑制电动致动器10大型化。
[0091]
另外,根据本实施方式,凹部16a与电子零件73隔着间隙在轴向z相向。因此,可抑制电子零件73与罩部16接触。由此,可抑制电子零件73损伤。另外,在将第一盖构件13固定在外壳主体12时,可抑制在第一盖构件13与外壳主体12接触之前电子零件73与罩部16接触。因此,可将第一盖构件 13适当地固定在外壳主体12。
[0092]
另外,根据本实施方式,罩部16中设置有凹部16a的部分中的上侧的面与罩部16中未设置凹部16a的部分中的上侧的面平坦地联接。因此,罩部16 中设置有凹部16a的部分不会向上侧突出。即,在本实施方式中,薄壁部16c 相对于厚壁部16b不会向上侧突出。由此,即使设置凹部16a,罩部16也不会在轴向z大型化。因此,可进一步抑制电动致动器10大型化。
[0093]
另外,根据本实施方式,电子零件73包括电容器74。电容器74大多情况下为即使在电子零件73中也较大的零件。因此,通过凹部16a避开电容器 74,由此可更有效地获得能够抑制电动致动器10的大型化的效果。
[0094]
另外,根据本实施方式,电容器74是在上侧的面具有防爆阀74a的电解电容器。因此,通过凹部16a避开电容器74的上侧的端部,由此可在不使罩部16整体的位置向上侧移动的情况下,在电容器74与罩部16的轴向z之间适当地设置用以使防爆阀74a发挥功能的所需的间隙。由此,可抑制电动致动器10大型化,且抑制设置在电容器74的防爆阀74a的运作受到阻碍。
[0095]
另外,根据本实施方式,多个凹部16a各自与彼此不同的电子零件73在轴向z相向。因此,与例如仅设置一个凹部16a且多个电子零件73与所述一个凹部16a相向的情况相比,
可缩小罩部16的下侧的面中设置有凹部16a的区域的总面积。由此,可增加罩部16中未设置凹部16a的部分,容易适当地维持罩部16的强度。具体而言,在本实施方式中,与设置一个具有在轴向z 观察时统一包围四个电容器74的外缘的凹部16a的情况相比,通过针对每个电容器74设置凹部16a,可使凹部16a彼此之间成为厚壁部16b。因此,可增大罩部16中的厚壁部16b的比例,且可适当地维持罩部16的强度。
[0096]
另外,根据本实施方式,在轴向z观察时,凹部16a为圆形状。因此,例如在通过凹部16a避开的电子零件73如本实施方式那样为电解电容器的情况下等,容易适当地避开电子零件73。
[0097]
另外,根据本实施方式,凹部16a凹陷的方向是马达轴41延伸的轴向z,电路基板70位于马达轴41的上侧。在所述结构的情况下,可容易根据电子零件73在轴向z的尺寸来决定覆盖电路基板70及电子零件73的罩部16的轴向z的位置。即,电子零件73越大,罩部16的位置越容易成为上侧,电动致动器10在轴向z容易大型化。与此相对,根据本实施方式,通过设置凹部16a,可将较大的电子零件73收容在外壳11的内部,且抑制电动致动器 10大型化。即,在电路基板70位于马达轴41的上侧的结构中,可更有效地获得能够抑制电动致动器10的大型化的效果。
[0098]
在电动致动器10中,可尤其有效地获得能够抑制所述电动致动器10在轴向z大型化的效果,所述电动致动器10是如本实施方式那样通过将马达轴 41与输出轴61在马达轴41的径向分离配置而实现小型化。
[0099]
本实用新型并不限于所述实施方式,也可以在本实用新型的技术思想的范围内采用其他结构。凹部只要与电子零件相向即可,可以在凹部的内部插入电子零件,也可以不在凹部的内部插入电子零件,还可以使电子零件与凹部的内表面接触。凹部的形状并无特别限定。在规定方向(轴向z)观察时,凹部可为椭圆形状,也可为多边形状。凹部的形状可根据相向的电子零件的形状来决定。
[0100]
凹部的数量若为一个以上,则并无特别限定。一个凹部可与多个电子零件相向。在设置有多个凹部的情况下,与各凹部相向的电子零件的种类也可彼此不同。与凹部相向的电子零件并无特别限定,也可为电容器以外的电子零件。与凹部相向的电子零件也可为晶体管,还可为微型计算机等的控制零件。电容器也可为电解电容器以外的电容器。
[0101]
罩部中设置有凹部的部分中的规定方向的其中一侧(上侧)的面与罩部中未设置凹部的部分中的规定方向的其中一侧的面也可以不平坦地联接。若罩部中设置有凹部的部分与罩部中未设置凹部的部分相比在规定方向(轴向z)的尺寸小,则可向规定方向的其中一侧突出。
[0102]
规定方向并无特别限定,也可为马达轴的轴向z以外的方向。规定方向例如可为与马达轴的轴向z正交的方向。所述情况下,电路基板例如可以以板面朝向径向的姿势配置在马达部的径向外侧。也可以在马达轴的轴向z排列配置马达轴与输出轴。
[0103]
本实用新型所应用的电动致动器的用途并无特别限定,也可以搭载在车辆以外。另外,本说明书中说明的各结构可在相互不矛盾的范围内适宜组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1