惯性驱动马达和用于控制该马达的方法与流程
1.本发明涉及惯性驱动马达和用于控制惯性驱动马达的方法。具体而言,本发明涉及惯性驱动马达,其被配置为通过粘滑效应(stick-slip effect)来驱动待驱动元件。
背景技术:
2.这种惯性驱动马达从现有技术中是已知的。us 5,593,033 b2公开了一种粘滑式压电马达,其包括两个压电元件,这两个压电元件连接到共同的保持元件。每个压电元件在其端部设置有摩擦元件。因此,每个压电元件被配置为在用激励电压信号激励时使其相应的摩擦元件移位。
3.ep 3 089 348b1公开了一种压电马达,其包括由两个弹性元件联接的两个压电致动器。在用相同的激励电压信号激励压电致动器时,弹性元件移位。为了实现待驱动元件的期望粘滑驱动,压电致动器在其极化(polarization)方向上不同,从而彼此相反地膨胀和收缩。需要不同的压电致动器被认为是不利的,因为这增加了生产复杂性和成本。
技术实现要素:
4.因此,本发明的目的是提供一种惯性驱动马达,其需要较少数量的不同零件,从而降低生产复杂性和成本。
5.该目的通过一种惯性驱动马达来解决,该惯性驱动马达包括:待驱动元件和定子,该定子包括:弹性框架;至少一个摩擦元件,其布置在弹性框架上并被配置为与待驱动元件摩擦接触;以及第一机电致动器(优选地压电致动器)和第二机电致动器(优选地压电致动器),它们被配置为在用具有锯齿信号的不同激励电压激励时通过相互作用引起弹性框架的变形,以使所述至少一个摩擦元件移位,以便通过与所述摩擦元件的粘滑接触来驱动所述元件。根据这种配置,在惯性驱动马达中可以使用相同的机电致动器。
6.有利的进一步发展是从属权利要求的主题。
7.当第一机电致动器的激励电压信号为第一激励电压信号并且第二机电致动器的激励电压信号为第二激励电压信号,并且第一激励电压信号和第二激励电压信号彼此镜像,这可能是有用的。
8.当第二激励电压信号在其最大电压电平与其最小电压电平之间的减小是第一激励电压信号在其最小电压电平与其最大电压电平之间的增大的负梯度,和/或其中第一激励电压信号在其最大电压电平与其最小电压电平之间的减小是第二激励电压信号在其最小电压电平与其最大电压电平之间的增大的负梯度时,这可能是有用的。
9.当第二激励电压信号具有其最小电压电平时第一激励电压信号具有其最大电压电平,和/或其中在第二激励电压信号具有其最大电压电平时第一激励电压信号具有其最小电压电平,这可以证明是便利的。利用这种激励电压信号,可以最有效地协调两个机电致动器的收缩和膨胀,从而优化传递给待驱动元件的驱动运动。
10.当第一机电致动器和第二机电致动器在结构和/或极化和/或取向方面彼此相同
时,这可能也是有用的。该特征分别将生产工作量和成本降至最低。
11.当第一机电致动器和第二机电致动器被配置为沿着平行的振动路径膨胀和收缩时,这可能是有利的,其中振动路径垂直于待驱动元件的移动方向。利用这种配置,致动器的膨胀和收缩可以容易地转换成用于驱动待驱动元件的弹性框架的往复循环变形。
12.当所述至少一个摩擦元件设置在弹性框架的一部分上时,这可以证明是便利的,其中该部分被配置为在激励第一机电致动器和第二机电致动器时相对于待驱动元件的移动方向倾斜。弹性框架的倾斜部分可以用作由致动器的膨胀和收缩驱动的摇杆元件,用于通过摩擦元件的摇摆运动传递待驱动元件的驱动运动。
13.当弹性框架的面向待驱动元件的一侧对应于弹性框架的第一侧,并且弹性框架的背离待驱动元件的相对侧对应于弹性框架的第二侧时,这可能是有用的,其中两个摩擦元件布置在弹性框架的第一侧上,或者其中,在另一待驱动元件设置在弹性框架的第二侧上的情况下,相同数量的摩擦元件布置在弹性框架的第一侧和第二侧中的每一侧上,其中优选地,一个或两个摩擦元件布置在弹性框架的第一侧和第二侧中的每一侧上。利用这种配置,可以由一个惯性驱动马达驱动两个元件。
14.当第一机电致动器和第二机电致动器相对于穿过至少一个摩擦元件或在两个摩擦元件之间穿过的定子对称平面对称地设置时,这可能也是有用的。这种配置提高了待驱动元件沿着运动轴线在两个方向上的驱动运动的精度。
15.当弹性框架包括容纳第一机电致动器的第一储仓(receptacle)和容纳第二机电致动器的第二储仓时,这可能是有利的,其中两个储仓优选地向弹性框架的同一侧开放,其中所述同一侧更优选地不同于面向待驱动元件的一侧,并且不同于背离待驱动元件的一侧。这种设计允许致动器以摩擦配合和/或形状配合的方式容易地与弹性框架联接。为了将致动器固定在相应的储仓中,粘合剂连接也证明是有帮助的。
16.然而,当弹性框架包括在第一储仓和第二储仓和/或摩擦元件之间的至少一个另一开口时,这可能也是有用的,其中优选地,弹性框架的围绕开口的部分被配置为柔性铰链。这种设计允许弹性框架将致动器的膨胀和收缩有效地转换成摩擦元件的驱动运动,并且最终是待驱动元件的驱动运动。
17.当弹性框架包括至少一个并且优选地一对定位螺钉时,这可能是有利的,所述定位螺钉相应地被配置为调节第一机电致动器和第二机电致动器抵靠弹性框架的设置有摩擦元件的一部分的预紧。利用这种定位螺钉,可以轻松地调整惯性驱动马达的基本驱动力参数。
18.此外,当至少一个摩擦元件沿着待驱动元件的移动方向位于第一机电致动器与第二机电致动器之间时,这可能是便利的。利用这种配置,摩擦元件可以将最高可能的驱动力传递到待驱动元件上。
19.当惯性驱动马达进一步包括控制装置时,这可能是有用的,该控制装置被配置为产生用于通过与摩擦元件的粘-粘滑接触来驱动所述待驱动元件所需的第一机电致动器和第二机电致动器的激励电压信号。由于马达本身的控制单元,外部驱动源是不必要的。
20.本发明的另一方面涉及一种用于控制根据任一前述实施例的惯性驱动马达的方法,该方法通过致动所述第一机电致动器和第二机电致动器,以便在用具有锯齿信号的优选地彼此镜像的不同激励电压激励时相互作用,以便引起弹性框架的变形,从而使至少一
个摩擦元件移位,以便通过与所述摩擦元件的粘滑接触来驱动该待驱动元件。在根据本发明的方法中,待驱动元件实际上通过与定子的摩擦元件的粘滑接触而沿着其运动轴线移动。与上文联系权利要求1所述的效果相同。
21.术语及定义
22.粘滑效应表示彼此相对移动的物体之间的粘滞-滑动,这在现有技术中是已知的。在这种情况下,待驱动元件通过粘滑效应沿着定子的调节包括:粘滞阶段,其中定子的摩擦元件通过静摩擦与待驱动元件接合;以及滑动阶段,其中摩擦元件由于惯性效应而相对于待驱动元件移动。
23.术语“机电致动器”表示包括或由机电材料构成的致动器,其在施加电压时经历物理变形。这种机电材料尤其包括压电和电致伸缩材料。
24.第一机电致动器和第二机电致动器在用具有锯齿信号的不同激励电压激励时的相互作用表示:当第一机电致动器在某一时间间隔期间由具有锯齿信号的第一激励电压激励并且第二机电致动器在同一时间间隔期间由具有锯齿信号的第二激励电压激励时,所述致动器的相互作用,其中第二激励电压不同于第一激励电压。
附图说明
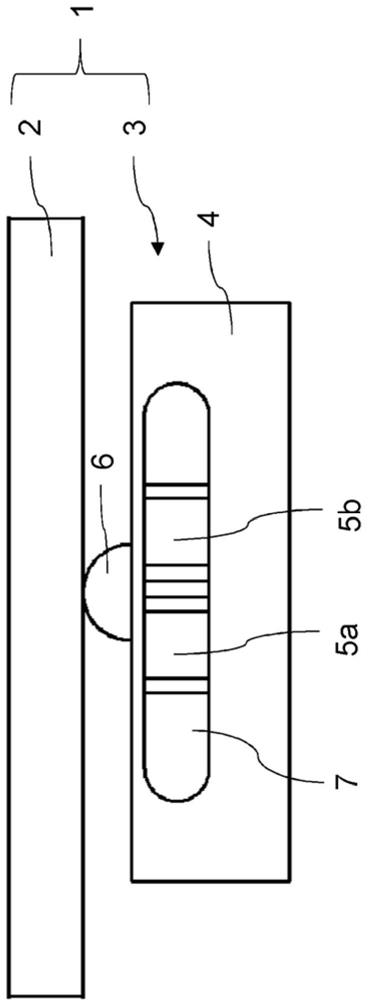
25.图1a示出了根据本发明第一实施例的惯性驱动马达的示意性侧视图。
26.图1b示出了图1a的惯性驱动马达的剖视图。
27.图2a示出了被施加到图1a的惯性驱动马达的压电致动器以便在第一方向上驱动待驱动元件的激励电压信号。
28.图2b示出了被施加到图1a的惯性驱动马达的压电致动器以便在第二方向上驱动待驱动元件的激励电压信号。
29.图3a和图3b示出了所计算的在压电致动器激励时根据第一实施例的惯性驱动马达的弹性框架的最大变形状态。
30.图4示出了第一实施例的惯性驱动马达的透视图,其中弹性框架设置有板簧。
31.图5示出了根据本发明第二实施例的惯性驱动马达,其中定子具有两个摩擦元件。
32.图6a和图6b示出了所计算的在压电致动器激励时根据第二实施例的惯性驱动马达的弹性框架的最大变形状态。
33.图7示出了根据本发明第三实施例的惯性驱动马达,其中定子总共具有四个摩擦元件,其中两个摩擦元件相应地设置在定子的同一侧。
34.图8a和图8b示出了所计算的在压电致动器激励时根据第三实施例的惯性驱动马达的弹性框架的最大变形状态。
35.图9示出了根据本发明第四实施例的惯性驱动马达,其中定子总共具有两个摩擦元件,并且弹性框架在接收致动器的储仓之间包括多个开口。
36.图10a和图10b示出了所计算的在压电致动器激励时根据第四实施例的惯性驱动马达的弹性框架的最大变形状态。
37.图11示出了根据本发明第五实施例的惯性驱动马达,其中定子总共具有四个摩擦元件,并且两个摩擦元件相应地布置在定子的同一侧,其中弹性框架在接收致动器的储仓之间具有多个开口。
38.图12a和图12b示出了所计算的在压电致动器激励时根据第五实施例的惯性驱动马达的弹性框架的最大变形状态。
具体实施方式
39.图1a中示出了惯性驱动马达1的第一实施例。惯性驱动马达1包括待驱动元件2和定子3。定子3包括弹性框架4、容纳在弹性框架4的储仓7中的第一压电致动器5a和第二压电致动器5a、以及布置在弹性框架4上的摩擦元件6。
40.弹性框架4具有板状形状。储仓7在弹性框架4中沿其纵向方向延伸,并在其宽度方向上完全穿透弹性框架4。关于弹性框架4的高度方向,储仓7定位成使得弹性框架4的薄部部分形成在储仓7上方。摩擦元件6布置在所述薄部部分的外表面上,该外表面构成弹性框架4的面向待驱动元件2的上侧表面的一部分。在该实施例中,摩擦元件6具有半球形形状,并经由其球形部与待驱动元件2接触,其中摩擦元件6的平坦圆形部与弹性框架4接触。
41.在储仓7内,第一压电致动器5a和第二压电致动器5b相对于穿过摩擦元件6延伸的定子对称平面对称地设置。与弹性框架4接触的第一压电致动器5a和第二压电致动器5b中的每一个的接触表面优选地通过粘合剂牢固地粘合到弹性框架4。第一电致动器5a和第二压电致动器5b是相同的致动器,具有相同的极化方向和相同的形状,并且以相同的取向容纳在储仓7中。优选地,处于中性(非激励)状态的致动器5a、5b的尺寸比储仓7的尺寸稍大,使得致动器5a、5b必须被压配合到储仓7中,并与限定储仓7的内部的弹性框架4保持牢固接触。
42.图1b是图1a所示的惯性驱动马达1的剖视图。图1b示出了设置在弹性框架4中的两个定位螺钉9。每个定位螺钉9被配置为将第一压电致动器5a和第二压电致动器5b中的一个压靠在弹性框架4的薄部部分上。以这种方式,可以实现第一压电致动器5a和第二压电致动器5b的预紧(pretension),这对于所述致动器的适当操作是必需的。所述致动器的进一步预紧可以通过待驱动元件2对摩擦元件6的压力来实现。一般来说,引起所述压力的待驱动元件2和定子3的相对布置对于惯性驱动马达1的充分运行至关重要。
43.图2a和2b中示出了由控制装置施加到第一压电致动器5a和第二压电致动器5b的激励电压信号。用激励电压信号v1激励第一压电致动器5a和用激励电压信号v2激励第二压电致动器5b导致待驱动元件2向前移动(即,图2中的向右方向)。激励电压信号v1和v2为锯齿信号,它们相互镜像。也就是说,第二激励电压信号v2在其最大电压电平与其最小电压电平之间的减小是第一激励电压信号v1在其最小电压电平与其最大电压电平之间的增大的负梯度。同样,第一激励电压信号v1在其最大电压电平与其最小电压电平之间的减小是第二激励电压信号v2在其最小电压电平与其最大电压电平之间的增大的负梯度。此外,在第二激励电压信号v2具有其最小电压电平时,第一激励电压信号v1具有其最大电压电平。类似地,在第二激励电压信号v2具有其最大电压电平时,第一激励电压信号v1具有其最小电压电平。
44.在该实施例中,第一激励电压信号v1和第二激励电压信号v2的最大电压电平是正电压值,并且第一激励电压信号v1和第二激励电压信号v2的最小电压电平是负电压值。要注意的是,激励电压信号v1和v2不限于具有从负电压值到正电压值或相反情况的转换的锯齿信号。一般来说,第一压电致动器5a和第二压电致动器5b也可以由仅具有正或负电压值
的激励电压信号激励,只要相应的激励电压信号彼此镜像即可。
45.在图2b中,第一压电致动器5a由激励电压信号v3(其对应于图2a所示的激励电压信号v2)激励。此外,第二压电致动器5b由激励电压信号v4(其对应于图2a所示的激励电压信号v1)激励。这种致动导致待驱动元件2向后移动(即,图2b中的向左方向)。
46.图3a和图3b示出了上述的用激励电压信号v1和v2或者v3和v4激励第一压电致动器5a和第二压电致动器5b期间发生的弹性框架4的变形。图3a示出了第一压电致动器5a收缩而第二压电致动器5b膨胀的状态。第一压电致动器5a和第二压电致动器5b的收缩和膨胀沿着平行的振动路径发生,所述振动路径垂直于待驱动元件2的移动方向。由于第一压电致动器5a和第二压电致动器5b的反向的收缩和膨胀,所以弹性框架4的其上布置有摩擦元件6的薄部部分用作摇杆并相对于待驱动元件2的移动方向倾斜。因此,摩擦元件6的尖端在薄部部分倾斜时移位。图3b示出了第一压电致动器5a膨胀而第二压电致动器5b收缩的状态。
47.由上述激励电压信号v1和v2或者v3和v4引起的第一压电致动器5a和第二压电致动器5b的交替的膨胀和收缩导致待驱动元件2由于粘滑效应而运动。特别地,关于激励电压信号v1和v2,激励电压信号v1在其最小电压电平与其最大电压电平之间的缓慢增大,以及激励电压信号v2在其最大电压电平与其最小电压电平之间的同时缓慢减小,导致摩擦元件6的尖端在待驱动元件2的移动方向上的缓慢移位。随后,激励电压信号v1在其最大电压电平与其最小电压电平之间的快速减小,以及激励电压信号v2在其最小电压电平与其最大电压电平之间的同时快速增大,导致摩擦元件6的尖端在与待驱动元件2的移动方向相反的方向上的快速移位。摩擦元件6的尖端在待驱动元件2的移动方向上的缓慢移位构成粘滞阶段,其中摩擦元件6的尖端粘滞到待驱动元件2的摩擦表面上。在所述粘滞阶段,由摩擦元件6的尖端施加到待驱动元件2的摩擦力在移动方向上推动待驱动元件2。摩擦元件6的尖端在与待驱动元件2的移动方向相反的方向上的快速移位构成滑动阶段,其中摩擦元件6的尖端沿着待驱动元件2的摩擦表面滑动。在所述滑动阶段,由摩擦元件6的尖端施加到待驱动元件2的摩擦力小于待驱动元件2的惯性力。因此,摩擦元件6的尖端在与待驱动元件2的移动方向相反的方向上移位,而不会导致待驱动元件2在所述相反方向上的移动。摩擦元件6的尖端的所述缓慢和快速移位的多次重复导致待驱动元件2的连续运动。通过用激励电压信号v3和v4激励第一压电致动器5a和第二压电致动器5b,实现类似的驱动概念。然而,如上所述,通过这种致动,待驱动元件2在向后方向上移动。
48.图4示出了第一实施例的惯性驱动马达1的定子3,其设置有两个承载弹性框架4的板簧10。板簧10形成为u形,其中其腿部附接到弹性框架4的面向待驱动元件2设置的表面和弹性框架4的背离待驱动元件2设置的相对表面。以这种方式,板簧10相对地布置在弹性框架4上,并且被配置为将定子3附接到基础结构,以便相对于待驱动元件2定位定子3。为了附接目的,板簧10设有通孔。
49.图5中示出了惯性驱动马达1的第二实施例。惯性驱动马达1的第二实施例基本上基于上面描述的惯性驱动马达1的第一实施例。下面描述第一实施例和第二实施例的不同之处。
50.根据第二实施例的惯性驱动马达1包括具有两个储仓7的弹性框架4。第一压电致动器5a容纳在一个储仓7中,并且第二压电致动器5b容纳在另一个储仓7中。储仓7沿其外周不封闭。因此,在弹性框架4的每个端部上,在其上布置有摩擦元件6的相应的薄部部分与弹
性框架4的下部部分之间形成有间隙。在该实施例中,定位螺钉9设置在弹性框架4的每个端部处,以便调节相应间隙的尺寸,从而将弹性框架4的薄部部分压靠在相应的压电致动器5a、5b上。
51.此外,在弹性框架4的纵向方向上,在储仓7之间设置有弹性框架4的开口8。弹性框架4的位于储仓7与开口8之间的部分被配置为柔性铰链。此外,两个具有三角形形状的摩擦元件6布置在弹性框架4的面向待驱动元件2的一侧上。特别地,楔形的摩擦元件6布置成使得它们的尖端位于穿过弹性框架4的构成柔性铰链的部分的竖直线上,其中每个摩擦元件6的一个支腿连接到弹性框架4,其中两个三角形和楔形的摩擦元件6的两个相应的平行支腿/面彼此面对,并且其中三角形和楔形的摩擦元件6的相应的斜边彼此背离并且从弹性框架4朝向待驱动元件2。第一压电致动器5a和第二压电致动器5b相对于定子3的沿着弹性框架4的竖直中心线延伸的对称平面对称地布置。
52.图6a和图6b示出了上述的用激励电压信号v1和v2或者v3和v4激励第一压电致动器5a和第二压电致动器5b期间发生的弹性框架4的变形。在该实施例中,在粘滞阶段期间,两个摩擦元件6的尖端同时在待驱动元件2的移动方向上移位,从而通过与待驱动元件2的摩擦表面的摩擦接触在移动方向上共同推动待驱动元件2。在滑动阶段期间,两个摩擦元件6的尖端同时沿着待驱动元件2的摩擦表面在与待驱动元件2的移动方向相反的方向上滑动,而待驱动元件2不移动。
53.图7中示出了惯性驱动马达的第三实施例。与第二实施例相对照,惯性驱动马达1的第三实施例设置有布置在定子3的相对侧上的两个待驱动元件2。因此,定子3设置有布置在弹性框架4的面向上部待驱动元件2的第一上侧上的两个摩擦元件6以及布置在弹性框架4的面向下部待驱动元件2的第二下侧上的两个摩擦元件6。根据第三实施例的惯性驱动马达1相对于弹性框架4的竖直和水平中心线对称地配置。图7中未示出定位螺钉9。然而,不言而喻,所述定位螺钉9同样可以应用于惯性驱动马达1的本实施例和其他实施例。
54.图8a和图8b示出了用激励电压信号v1和v2或者v3和v4激励第一压电致动器5a和第二压电致动器5b期间发生的弹性框架4的变形。在该实施例中,在粘滞阶段期间,所有四个摩擦元件6的尖端同时在待驱动元件2的移动方向上移位。因此,布置在弹性框架4的第一上侧上的两个摩擦元件6在移动方向上共同推动上部待驱动元件2,并且布置在弹性框架4的第二下侧上的两个摩擦元件6在移动方向上共同推动下部待驱动元件2。在滑动阶段期间,所有四个摩擦元件6的尖端同时沿着相应的待驱动元件2的摩擦表面在与移动方向相反的方向上滑动,而相应的待驱动元件2不移动。
55.图9中示出了惯性驱动马达1的第四实施例。根据第四实施例的惯性驱动马达1提供了具有两个开口8的弹性框架4,这两个开口在纵向方向上相邻布置在储仓7之间。因此,在弹性框架4中在开口8之间形成一个被配置为柔性铰链的中心部分。此外,在弹性框架4中在一个开口8与相邻储仓7之间形成两个被配置为柔性铰链的偏心部分。两个半球形摩擦元件6布置在弹性框架4的上侧上。每个摩擦元件布置在穿过被配置为柔性铰链的偏心部分之一的竖直线上。根据第四实施例的惯性驱动马达1相对于穿过被配置为柔性铰链的中心部分的定子平面对称地配置。
56.图10a和图10b示出了用激励电压信号v1和v2或者v3和v4激励第一压电致动器5a和第二压电致动器5b期间发生的弹性框架4的变形。粘滞阶段和滑动阶段期间的条件对应
于第二实施例中描述的条件。
57.图11中示出了惯性驱动马达1的第五实施例。与第四实施例相对照并且类似于第三实施例,惯性驱动马达1的第五实施例设置有布置在定子3的相对侧上的四个摩擦元件6和两个待驱动元件2。根据第五实施例的惯性驱动马达1相对于弹性框架4的水平和竖直中心线对称地配置。
58.图12a和图12b示出了用激励电压信号v1和v2或者v3和v4激励第一压电致动器5a和第二压电致动器5b期间发生的弹性框架4的变形。粘滞阶段和滑动阶段期间的条件对应于第三实施例中描述的条件。
59.根据第一至第五实施例的惯性驱动马达1的动态特性不同。根据需要,可以选择合适的实施例。
60.附图标记列表
61.1惯性驱动马达
62.2待驱动元件
63.3定子
64.4弹性框架
65.5a第一机电致动器
66.5b第二机电致动器
67.6摩擦元件
68.7储仓
69.8开口
70.9定位螺钉
71.10板簧
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1