外转子型马达的制作方法
1.本发明涉及一种外转子型马达。
背景技术:
2.以往的外转子型马达中,已知有在罩壳设有转子的外转子型马达(例如参照专利文献1)。专利文献1所记载的外转子型马达中,在转子形成有散热孔或冷却鳍片,使空气的循环变容易,可谓也可防止由过热所致的结构零件的损伤。
3.现有技术文献
4.专利文献
5.专利文献1:日本公表公报专利特表2008-521542号公报
技术实现要素:
6.发明所要解决的问题
7.此外,例如作为减少由具有旋转槽的滚筒式洗衣机等所搭载的外转子型马达所产生的噪音的方法,已知有利用弹性支撑构件来支撑旋转槽。
8.但是,所述弹性支撑构件为橡胶材料,有经年劣化的弊端,而且有时防振减振性能不充分。外转子型马达不仅产生由齿槽转矩(cogging torque)所致的旋转方向的振动,而且在转子的径向及旋转轴方向也产生振动,仅在一个方向发挥功能的弹性支撑构件无法充分防振。由外转子型马达产生的噪音中,不仅包含由齿槽转矩引起的低频段(~300hz),而且也包含高频段(300hz~2000hz)的噪音,此高频段的噪音也包括来自外转子的罩壳的、直接辐射音。
9.因此,本发明的目的在于,在外转子型马达中较以往进一步降低动作时的噪音。
10.解决问题的技术手段
11.本案的例示性的第一发明为一种外转子型马达,包括:转子,包括有底圆筒状的罩壳;以及主轴,设置于所述转子的中心轴,所述罩壳在所述主轴的一端侧具有圆板部,所述圆板部具有基准面、以及分别沿径向延伸且从所述基准面沿轴向突出的多个突出部,所述圆板部中,以所述多个突出部中邻接的突出部所成的角度中存在至少一组不同角度的组合的方式,设有所述多个突出部。
12.发明的效果
13.根据本发明,可在外转子型马达中较以往进一步降低动作时的噪音。
附图说明
14.[图1]为第一实施方式的外转子型马达的截面图。
[0015]
[图2](a)~(d)分别为表示转子罩壳的固有振动模式的图。
[0016]
[图3](a)、(b)分别为表示转子罩壳的维度下的振动模式的图。
[0017]
[图4]为示意性地表示由作用于转子罩壳的电磁力所致的振动模式(电磁力模式)
的图。
[0018]
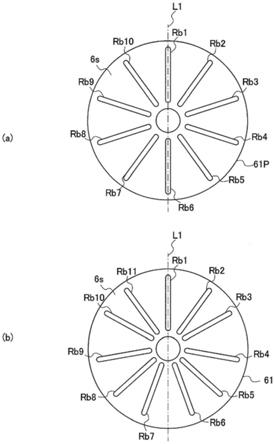
[图5](a)为表示作为参考的、以往的转子罩壳的肋配置的图,(b)为表示第一实施方式的第一例的转子罩壳的肋配置的图。
[0019]
[图6](a)为表示作为参考的、以往的转子罩壳的肋配置的图,(b)为表示第一实施方式的第二例的转子罩壳的肋配置的图。
[0020]
[图7](a)为表示作为参考的、以往的转子罩壳的肋配置的图,(b)为表示第一实施方式的第三例的转子罩壳的肋配置的图。
[0021]
[图8](a)为表示作为参考的、以往的转子罩壳的肋配置的图,(b)为表示第一实施方式的第四例的转子罩壳的肋配置的图。
[0022]
[图9]为表示以往与第一实施方式的外转子型马达中,相对于频率的振动响应水平的图。
[0023]
[图10]为表示第二实施方式的外转子型马达中转子罩壳的一例的立体图。
[0024]
[图11]为表示以往与第二实施方式的外转子型马达中,相对于频率的音压水平的图。
具体实施方式
[0025]
以下,对本发明的外转子型马达的实施方式进行说明。
[0026]
(1)第一实施方式
[0027]
(1-1)第一实施方式的外转子型马达的概略结构
[0028]
首先,参照图1对本实施方式的外转子型马达的概略结构进行说明。图1为本实施方式的外转子型马达1的截面图。
[0029]
如图1所示,本实施方式的外转子型马达具有圆筒状的套筒10,此套筒10收容作为旋转轴的主轴5。在圆筒状的套筒10的内周侧,安装有轴承2、4。通过轴承2、4旋转自如地支撑主轴5。
[0030]
在主轴5压入固定有转子3。所述转子3包括有底圆筒状的转子罩壳6、及固定于转子罩壳6的内周侧的永磁石7。此外,本实施方式的外转子型马达的极对数可为任何数量。
[0031]
在转子罩壳6的中心部压入有主轴5。主轴5设置于转子3的中心轴。
[0032]
转子罩壳6包括沿旋转轴正交方向延伸的圆板部61、及从圆板部61的外缘部沿旋转轴方向延伸的圆筒状的圆筒部62,成为有底圆筒状。转子罩壳6为金属制且也作为磁轭(yoke)发挥功能。此外,转子罩壳6也可为树脂制。
[0033]
在圆筒状的套筒10的外周侧,固定有在铁芯81卷绕线圈82而成的定子8。定子8配置于转子罩壳6的圆筒部62的内侧,与永磁石7对峙。
[0034]
这样构成的外转子型马达1若对线圈82供给电力则定子8产生电磁力,主轴5及转子3承受旋转的电磁力而旋转。
[0035]
在转子罩壳6的圆板部61中与定子8相向的底面6s(基准面的一例),形成有沿主轴5的轴向突出的多个肋rb(突出部的一例)。所述多个肋rb是为了降低由外转子型马达1产生的噪音而设置。关于多个肋rb的配置,将在下文中描述。
[0036]
(1-2)转子罩壳6的肋配置的想法
[0037]
接下来,参照图2~图4对转子罩壳的肋配置的想法进行说明。
[0038]
图2为表示转子罩壳的固有振动模式的图。图3为表示转子罩壳的维度下的振动模式的图。图4为示意性地表示由作用于转子罩壳的电磁力所致的振动模式的图。
[0039]
转子罩壳6的圆板部61那样的圆板结构具有固有振动模式。将不具有肋的情况下的、圆板结构的固有振动模式的一例示于图2及图3。
[0040]
如图2所示,圆板结构成为在其圆形的面中以直径为节(节线)的振动模式。根据节线数,存在图2(a)~(d)所例示的多个振动模式。此处,图2(a)表示具有两个节线的振动模式,图2(b)表示具有三个节线的振动模式,图2(c)表示具有四个节线的振动模式,图2(d)表示具有五个节线的振动模式。
[0041]
图3(a)、(b)以三维来表示图2(a)的具有两个节线的振动模式。
[0042]
共振时的频率视圆板结构的振动模式的节线数而不同,基于节线数
×
基本频率的频率成为共振频率。
[0043]
如图2所示,各振动模式下的节线构成为,将圆板结构的圆形的面等分。因此,在所述圆板结构的面等分地配置有肋的情况下,其振动模式与图4所例示相同,仍然是基于节线数
×
基本频率的频率成为共振频率。
[0044]
如图4所示,作为对转子罩壳的激振源的电磁力具有使转子罩壳在旋转轴的半径方向(即径向方向)振动的振动模式(称为“电磁力模式”)。图4(b)为次数较图4(a)更高的振动模式的示例。电磁力模式的次数成为偶数。
[0045]
在电磁力模式的次数(偶数)、与转子罩壳的圆板结构的固有振动模式的次数一致的情况下,可认为从转子罩壳辐射的音压水平高,成为令人感到不适(即,嘈杂)的噪音。即,外转子的罩壳具有由圆板结构所引起的固有振动模式,可认为若所述固有振动模式、与作为罩壳的激振源的电磁力的径向方向的振动模式下频率一致,则出现大的噪音。
[0046]
因此,本实施方式的转子罩壳6中,通过在转子罩壳6的底面6s中以不等分的方式配置肋rb,从而使固有振动模式从图2所例示那样的具有节线的模式变化,由此以抑制底面6s的位移的方式使电磁力发挥作用。即,可认为,通过将转子罩壳设为在进行基于电磁力模式的激振时不易产生由固有振动模式所致的周期性位移的圆板结构,从而不产生在特定频率具有明显波峰的音压水平而噪音降低。
[0047]
(1-3)本实施方式的外转子型马达1的肋的配置例
[0048]
参照图5~图8对本实施方式的外转子型马达1的转子罩壳6的肋rb的配置例进行说明。
[0049]
在所述肋配置的想法下,本实施方式的转子罩壳6中,在圆板部61的底面6s中,以多个肋中邻接的肋所成的角度中存在至少一组不同角度的组合的方式设有多个肋。即,在转子罩壳6的底面6s,以不等分的方式配置有肋rb。
[0050]
图5(a)为表示作为参考的、以往的转子罩壳的肋配置的图,图5(b)为表示本实施方式的第一例的转子罩壳的肋配置的图。
[0051]
图5(a)表示下述示例,即:在以往的转子罩壳的圆板部61p的圆形的底面6s,等分地配置有10根肋rb1~rb10。例如,在穿过肋rb1的假想线l1上配置有肋rb6。圆板部61p中,多个肋中邻接的肋所成的角度全部相同(36度)。
[0052]
相对于此,如图5(b)所示,本实施方式的第一例的转子罩壳6的圆板部61中,在底面6s不等分地配置有11根肋rb1~rb11。例如,在穿过肋rb1的假想线l1上,未配置有其他任
何肋。圆板部61中,多个肋中邻接的肋所成的角度中存在至少一组不同角度的组合。
[0053]
第一例中,以肋rb1为基准顺时针观看时的各肋rb1、rb2、
…
、rb11的角度为0、36、61、100、132、160、200、228、260、299、324度。各肋的角度不限定于此,但通过如此设定角度,从而成为以下的肋的组合取得了旋转平衡的状态。
[0054]
·
肋rb1与肋rb6及肋rb7的旋转平衡
[0055]
·
肋rb2与肋rb7及肋rb8的旋转平衡
[0056]
·
肋rb3与肋rb8及肋rb9的旋转平衡
[0057]
·
肋rb4与肋rb9及肋rb10的旋转平衡
[0058]
此外,所述角度设定中,相对于肋rb2的肋rb7及肋rb8、相对于肋rb3的肋rb8及肋rb9、相对于肋rb4的肋rb9及肋rb10分别未完全成为线对称,而成为接近线对称的状态。
[0059]
图6(a)为表示作为参考的、以往的转子罩壳的肋配置的图,图6(b)为表示本实施方式的第二例的转子罩壳的肋配置的图。
[0060]
图6(a)表示下述示例,即:在以往的转子罩壳的圆板部61q的圆形的底面6s,等分地配置有8根肋rb1~rb8。例如,在穿过肋rb1的假想线l1上配置有肋rb5。圆板部61q中,多个肋中邻接的肋所成的角度全部相同(45度)。
[0061]
相对于此,如图6(b)所示,本实施方式的第二例的转子罩壳6的圆板部61a中,在底面6s不等分地配置有8根肋rb1~rb8。即,圆板部61a中,多个肋中邻接的肋所成的角度中存在至少一组不同角度的组合。
[0062]
第二例中,以肋rb1为基准顺时针观看时的各肋rb1、rb2、
…
、rb11的角度为0、38、80、128、180、232、280、322度。各肋的角度不限定于此,但通过这样设定角度,从而成为以下的肋的组合取得了旋转平衡的状态。
[0063]
·
肋rb1与肋rb4、rb5、rb6的旋转平衡
[0064]
·
肋rb2与肋rb5、rb6、rb7的旋转平衡
[0065]
·
肋rb3与肋rb6、rb7、rb8的旋转平衡
[0066]
·
肋rb4与肋rb1、rb7、rb8的旋转平衡
[0067]
此外,所述角度设定中,与肋rb1~rb4分别对应的3个肋并未完全成为线对称,而成为接近线对称的状态。
[0068]
第一例及第二例的任一情况下,就良好地取得所述旋转平衡的观点而言,均优选以下述方式配置,即:相对于多个肋中成为基准的基准肋延伸的径向即基准方向,多个肋中基准肋以外的两个肋(第一突出部与第二突出部的示例)沿互相成线对称的径向延伸。例如,第一例(图5(b))中,在以肋rb1作为基准肋的情况下,优选相对于肋rb1的基准方向(沿着假想线l1的方向),两个肋rb6、rb7沿互相成线对称的方向延伸,两个肋rb5、rb8沿互相成线对称的方向延伸,两个肋rb4、rb9沿互相成线对称的方向延伸,两个肋rb3、rb10沿互相成线对称的方向延伸,两个肋rb2、rb11沿互相成线对称的方向延伸。
[0069]
图5(b)的第一例是肋根数为奇数的情况的示例,图6(b)的第二例是肋根数为偶数的情况的示例,更优选肋根数为奇数的情况。其原因在于,如上文所述,若将肋的根数设为奇数,则圆板结构的转子罩壳6不易产生次数成为偶数的固有振动模式,而且,由于电磁力模式的次数为偶数,因而电磁力在转子罩壳6的振动模式受到抑制的方向作用。
[0070]
而且,无论肋的根数是偶数还是奇数,均优选多个肋中任意两根肋不成为一直线。
换句话说,优选以多个肋中作为基准的基准肋延伸的径向、与多个肋中基准肋以外的肋延伸的径向不一致的方式设定。由此,不易对转子罩壳6产生特定的固有振动模式,因而有利于降低噪音。
[0071]
此外,此时多个肋中任意的肋均可成为基准肋。
[0072]
图7(a)为表示作为参考的、以往的转子罩壳的肋配置的图,图7(b)为表示本实施方式的第三例的转子罩壳的肋配置的图。
[0073]
图7(a)表示下述示例,即:在以往的转子罩壳的圆板部61r的圆形的底面6s,等分地配置有10根肋rb1~rb10。例如,在穿过肋rb1的假想线l1上配置有肋rb6。圆板部61r中,多个肋中邻接的肋所成的角度全部相同(36度)。
[0074]
相对于此,如图7(b)所示,本实施方式的第三例的转子罩壳6的圆板部61b中,在底面6s不等分地配置有9根肋rb1~rb9。例如,在穿过肋rb1的假想线l1上,未配置有其他任何肋。圆板部61b中,多个肋中邻接的肋所成的角度中存在至少一组不同角度的组合。
[0075]
第三例中,以肋rb1为基准顺时针观看时的各肋rb1、rb2、
…
、rb9的角度为0、46、82、115、156、204、245、278、312度,但各肋的角度并无限定。
[0076]
图8(a)为表示作为参考的、以往的转子罩壳的肋配置的图,图8(b)为表示本实施方式的第四例的转子罩壳的肋配置的图。
[0077]
图8(a)表示下述示例,即:在以往的转子罩壳的圆板部61s的圆形的底面6s,等分地配置有8根肋rb1~rb8。例如,在穿过肋rb1的假想线l1上配置有肋rb5。圆板部61s中,多个肋中邻接的肋所成的角度全部相同(45度)。
[0078]
相对于此,如图8(b)所示,本实施方式的第四例的转子罩壳6的圆板部61c中,在底面6s不等分地配置有7根肋rb1~rb7。例如,在穿过肋rb1的假想线l1上未配置有其他任何肋。圆板部61c中,多个肋中邻接的肋所成的角度中存在至少一组不同角度的组合。
[0079]
第四例中,以肋rb1为基准顺时针观看时的各肋rb1、rb2、
…
、rb7的角度为0、59、99、148、212、261、301度,但各肋的角度不限定于此。
[0080]
此外,图1所示的示例中,表示了肋rb设于转子罩壳6的圆板部61中与定子8相向的底面6s的示例,但不限于此。肋rb也可设于圆板部61的与底面6s为相反侧的上表面(基准面的一例)。
[0081]
图9中表示图5(a)所示的以往的肋配置、与图5(b)所示的本实施方式的第一例的肋配置的情况下,相对于频率的振动响应水平。
[0082]
如图9所示可知,通过在转子罩壳6的圆板部61的底面6s不等分地配置肋,从而与如以往那样等配地配置肋的情况相比较,振动响应水平成为波峰的频率经分散,避免在特定频率具有明显波峰。
[0083]
(2)第二实施方式
[0084]
接下来,参照图10及图11对第二实施方式的外转子型马达进行说明。图10为包括贯通孔及冷却用鳍片的、例示性的转子罩壳的立体图。
[0085]
本实施方式的外转子型马达中,仅转子罩壳与第一实施方式不同。因此,本实施方式中,也在转子罩壳中在圆板部的底面不等分地配置有肋。
[0086]
以下,着眼于转子罩壳进行说明,省略与其他部位有关的重复说明。
[0087]
如图10所示,本实施方式的转子罩壳6c与第一实施方式的转子罩壳6同样地具有
圆板结构,但在圆板部61c设有贯通孔611及冷却用鳍片612的方面与第一实施方式的转子罩壳6不同。贯通孔611沿圆周方向排列形成于转子罩壳6c的上表面6ts(与底面6s为相反侧的面)。冷却用鳍片612是为了向各贯通孔611导入空气,而以在各贯通孔611中从上表面6ts沿旋转轴的方向突出的方式形成。
[0088]
包括贯通孔及冷却用鳍片的转子罩壳有时伴随旋转而产生被称为叶片振音的、周期性噪音。产生叶片振音的原理如下。
[0089]
若冷却用鳍片旋转,则外部的空气随着通过冷却用鳍片而从贯通孔流入马达内部。空气在流入马达内部时收缩,在进入了马达内部时扩张。此种空气的收缩与扩张以通过各冷却用鳍片的时间差反复进行。因反复进行所述空气的收缩与扩张而导致产生叶片振音。
[0090]
将由空气的收缩所致的、空气的压力变动设为音压p(t),设想通过冷却用鳍片时空气的压力(即音压)达到最大。
[0091]
此处,若冷却用鳍片等分地配置于上表面,则音压p(t)成为以下的式(1)所示的周期性者。
[0092]
p(t)=cos(ωz
·
t)
…
(1)
[0093]
此外,式(1)中,ωz=2πf
×
z(f:旋转频率(hz),z:冷却用鳍片的片数)。
[0094]
即,图10中,若冷却用鳍片612等分地配置于上表面6ts,则式(1)所规定的音压水平的波峰以规定频率产生,成为刺耳的噪音。
[0095]
因此,本实施方式的变形例的转子罩壳6c中,在上表面6ts(基准面的一例)不等分地配置贯通孔611及伴随于此的冷却用鳍片612。具体而言,转子罩壳6c的圆板部61c构成为,在邻接的肋之间,具有贯通孔611和冷却用鳍片612。如上文所述,在圆板部61c的底面6s不等分地配置有多个肋。因此,通过在多个肋中邻接的肋间设置贯通孔611,在贯通孔611配置冷却用鳍片612,从而自发地在圆板部61c的上表面6ts沿圆周方向不等分地配置有冷却用鳍片612。通过这样配置冷却用鳍片612,从而不产生在特定频率具有波峰的音压,可降低叶片振音。
[0096]
图11为表示相对于频率的音压水平的实测结果的图。图11(a)表示作为以往的外转子型马达的、在图5(a)所示的肋配置中邻接的肋间设有贯通孔和冷却用鳍片的情况。相对于此,图11(b)表示在图5(b)所示的肋配置中邻接的肋间设有贯通孔和冷却用鳍片的情况。
[0097]
如图11所示可知,图11(b)的情况下,与图11(a)相比较而音压水平的波峰大幅度地降低。具体而言,确认到以往的外转子型马达中产生的270hz(1次)、540hz(2次)、810hz(3次)下产生的音压水平的波峰最大降低12db。
[0098]
以上,对本发明的外转子型马达的实施方式进行了详细说明,但本发明的范围不限定于所述实施方式。而且,所述实施方式可在不偏离本发明主旨的范围内进行各种改良或变更。
[0099]
符号的说明
[0100]
1:外转子型马达
[0101]
2、4:轴承
[0102]
3:转子
[0103]
5:主轴
[0104]
6、6c:转子罩壳
[0105]
61、61a、61b、61c、61p、61q:圆板部
[0106]
62:圆筒部
[0107]
6s:底面
[0108]
6ts:上表面
[0109]
611:贯通孔
[0110]
612:冷却用鳍片
[0111]
7:永磁石
[0112]
8:定子
[0113]
81:铁芯
[0114]
82:线圈
[0115]
10:套筒
[0116]
l1:假想线
[0117]
rb(rb1~rb11):肋
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1