用于通过处理位置传感器的信号来确定电机转子的位置和/或速度的方法与流程
用于通过处理位置传感器的信号来确定电机转子的位置和/或速度的方法
发明领域
1.本发明涉及确定电机的转子的位置和/或速度的领域。
2.电机转子的角位置和/或角速度的精确知悉对于控制和监测电机是特别有用的。实际上,转子位置和/或速度通常是用于控制此类电机、尤其用于控制其扭矩和/或旋转速度的必要数据。
3.存在已经为此应用开发的各种各样的位置传感器,值得注意地包括磁致伸缩传感器、编码器、求解器(solver)、gmr(巨磁阻)传感器、感应式传感器。这样的传感器可以生成两个信号,余弦波类型的第一信号和正弦波类型的第二信号,转子位置和/或速度从其重构。
4.理想地,这些信号应当具有相同的振幅,没有偏移,并且它们应当是正交的(相位差严格地等于90
°
)。然而,这些信号可能包括谐波,这些谐波在转子位置和/或速度的重构时可造成转子位置或速度确定的显著不准确性。此外,这两个信号之间也可能存在相位差(例如,由于位置传感器的位置),当确定转子位置或速度时,这也可能造成误差。这些不准确性和误差对电机控制或电机监测具有显著影响。事实上,转子位置中的误差可以例如生成对于使用该电机的不合适的扭矩设定点、或扭矩谐波等。
5.发明背景
6.为了限制谐波和相位差的影响,已经开发了若干技术方案。
7.例如,专利申请de-102014226604描述了一种校正转子的角位置的方法。该方法使用围绕转子相对于彼此以90
°
布置的两个位置传感器的测量,并且根据来自两个位置传感器的信号的相位差提供校正值的估计。然而,该方法仅允许校正相位差,而不允许校正谐波。
8.专利申请de-102016220188描述了一种借助于静态校正和动态校正来校正生成正弦和余弦信号的旋转传感器测量的方法。静态校正基于图表,并且动态校正旨在将信号之间的振幅差和偏移差纳入考虑。然而,这种方法不能实现谐波的持续校正。另外,使用图表可能不提供最佳校正并且需要准备复杂的图表,这些复杂的图表可能尤其取决于电机的转速和负载。
9.专利申请us-2019/0031046涉及消除测量电机的位置的信号中的偏移。该方法基于信号的加法和减法并且基于借助于运动状态滤波器使用积分器。因此,这种方法允许仅消除偏移,它没有确定并消除谐波。
技术实现要素:
10.本发明的目的是以精确且无误差的方式确定转子的速度和位置。本发明涉及一种通过使用包括谐波观测器、相位差校正以及估计转子的位置的第一锁相环的闭环来确定谐波以确定电机的转子的角速度和/或角位置的方法。
11.此外,本发明涉及一种通过以下方式来确定电机转子的速度和/或位置的方法:通
过仅在谐波观测器收敛时才对这些测量信号进行持续校正来精确地确定谐波,这些经校正信号被用来确定该转子的位置和/或速度。谐波的确定是使用包括谐波观测器、相位差校正、以及估计转子的位置的第一锁相环的闭环来执行的。
12.本发明涉及一种借助于确定电机转子的位置的传感器来确定所述转子的位置和/或速度的方法,所述位置传感器生成余弦信号和正弦信号。该方法利用包括谐波状态观测器、对由此生成的所述余弦信号和正弦信号的所述相位差的校正以及第一锁相环pll的闭环,所述谐波的所述状态观测器将所述所生成的余弦信号和正弦信号以及由所述第一锁相环pll估计的所述转子位置的值与所述谐波进行相关,所述相位差的所述校正借助于由所述谐波的所述状态观测器确定的所述谐波来标识并校正所述所生成的余弦和正弦信号的相位差,以及所述第一锁相环pll根据所述经校正余弦和正弦信号来估计所述转子的位置和/或速度。
13.根据一个实施例,进行以下步骤:
14.a)借助于包括所述谐波的所述状态观测器、所述所生成的余弦信号和正弦信号的所述相位差的所述校正、以及所述第一锁相环pll的所述闭环来确定所述所生成的余弦信号和正弦信号的谐波,
15.b)确定所述谐波的所述状态观测器是否收敛,
16.c)当所述谐波的所述状态观测器收敛时,通过更新所述所确定的谐波来持续校正所述所生成的余弦信号和正弦信号,以及
17.d)根据所述经校正余弦信号和正弦信号、借助于第二锁相环pll来确定所述转子的所述位置和/或所述速度。
18.有利地,所述谐波的所述状态观测器的收敛是通过验证以下等式来确定的:
[0019][0020]
其中,ya和yb是所述所生成的余弦和正弦信号,和是借助于所述估计的位置来重构的所述信号以及ε是预定阈值。
[0021]
优选地,所述第一和第二锁相环pll包括比例积分控制器和积分器。
[0022]
有利地,所述第一和第二锁相环pll的传递函数被写作如下:
[0023][0024]
其中,θ是所述转子的位置,是所述转子的所估计位置,s是拉普拉斯参数,k
p
是所述比例积分控制器的比例系数,并且ki是所述比例积分控制器的积分系数。
[0025]
根据一种实现,所述第一锁相环的所述积分系数ki小于所述第二锁相环的所述积分系数ki。
[0026]
根据一个方面,所述余弦和正弦信号是通过过滤所述所确定的谐波并且可能通过校正所述余弦和正弦信号的相位差来校正的。
[0027]
根据一个特征,所述谐波的所述状态观测器涉及传递函数:
[0028][0029]
其中s是拉普拉斯参数,α是增益,k是所考虑的谐波的阶数,n是所述余弦和正弦信号的谐波数目,ω是基波频率,y是在余弦和正弦信号之间考虑的所生成的信号,以及是在余弦和正弦信号之间考虑的所生成的信号的所估计的k阶谐波。
[0030]
根据一个实施例,所述增益α小于所述基波频率,优选地,所述增益α小于所述基波频率ω的十分之一。
[0031]
根据一个实施例选项,所述谐波的所述状态观测器进一步确定所述谐波的所述基波系数以及所述生成的余弦和正弦信号的所述偏移。
[0032]
根据一种实现,所述所产生的余弦信号与正弦信号之间的所述相位差是使用反正切函数借助于所述谐波的所述基波系数来标识的。
[0033]
有利地,所述所生成的余弦信号与正弦信号之间的所述相位差φ借助于以下等式确定:
[0034][0035]
其中
[0036][0037][0038]
并且其中l
1b
是所述所生成的余弦信号和正弦信号之一的基波系数,和是由所述谐波的所述状态观测器确定的基波系数,δθ是所述转子的所测得位置与由所述第一锁相环pll估计的所述转子的位置之间的差值。
[0039]
根据一实施例,所述所生成的余弦和正弦信号之一的所述相位差是借助于以下等式来校正的:
[0040][0041]
其中y
fb-correction
是所述所生成的余弦和正弦信号之一的所述经校正的所生成的信号的基波,l
1a
和l
1b
是所述所生成的余弦和正弦信号的基波系数,y
fa
和y
fb
是所述测量的所生成的余弦和正弦信号的基波,并且φ是所述相位差。
[0042]
根据一方面,所述位置传感器是磁致伸缩传感器、电感式传感器、编码器、gmr传感器、amr传感器、tmr传感器或求解器。
[0043]
此外,本发明涉及一种控制电机的方法,所述电机包括确定所述电机的转子的位置的传感器,所述位置传感器生成余弦信号和正弦信号,其中执行以下步骤:
[0044]
a)借助于根据上述特征之一的所述方法和由所述位置传感器生成的所述信号来确定所述转子的所述位置和/或所述速度,以及
[0045]
b)根据所确定的位置和/或速度控制所述电机。
[0046]
附图的简要说明
[0047]
参照附图,通过阅读以下通过非限制性示例给出的实施例的描述,根据本发明的方法的其他特征和优点将显而易见,其中:
[0048]-图1解说了根据本发明的第一实施例的方法的各步骤,
[0049]-图2解说了根据本发明的第二实施例的方法的各步骤,
[0050]-图3解说了根据本发明的实施例的锁相环的构造,
[0051]-图4解说了根据本发明的方法的应用示例的参考旋转速度,
[0052]-图5解说了利用图4的应用示例的根据本发明的实施例的方法确定的旋转速度,以及
[0053]-图6解说了参考位置与用根据图4的应用示例的实施例的方法确定的位置之间的位置误差。
[0054]
本发明的详细描述
[0055]
本发明涉及电机的转子的位置的确定。该电机提供有角位置传感器,该角位置传感器在测量时生成余弦信号和正弦信号。在本说明书的其余部分中,这两个信号被称为测量信号。此外,在本说明书的其余部分中,所谓的位置是转子的角位置,并且所谓的速度是转子的角速度。本发明适用于有待测量其位置的任何电机。本发明特别适合于对位置测量非常敏感的永磁体辅助的同步磁阻机器。
[0056]
位置传感器可选自磁致伸缩传感器、感应传感器、编码器和求解器、gmr传感器(基于巨磁电阻)、amr传感器(基于各向异性磁电阻)、tmr传感器(基于隧道效应磁电阻)或能够生成余弦测量信号和正弦测量信号的任何其他传感器。
[0057]
所谓的谐波是周期函数的主分解元素,在此周期函数对应于测量信号。所谓的基波是测量信号的一阶谐波,即一次谐波。所谓的偏移是测量信号的连续偏移。
[0058]
优选地,根据本发明的方法可以使用单个位置传感器,因此限制与传感器的倍增相关以及与精确定位若干传感器的难度相关的不准确性。
[0059]
根据第一实施例,该方法可以使用闭环,该闭环允许确定测量信号的谐波并且从其中推导出转子的位置和/或速度。结合说明书的其余部分中的步骤1详细描述闭环。闭环的这些步骤可以由计算机系统或电子系统、尤其是控制该电机的计算机或电子系统来执行。
[0060]
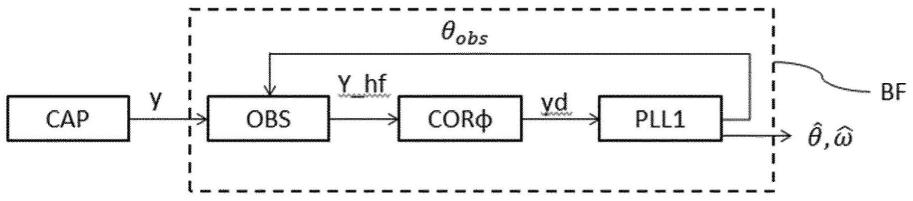
图1藉由非限制性示例示意性地解说了根据本发明的第一实施例的方法的各步骤。位置传感器cap首先生成测量信号y。然后,借助于闭环bf确定这些测量的谐波,该闭环bf包括谐波状态观测器obs、相位差校正器corφ以及第一锁相环pll1。谐波状态观测器obs从测量信号y和从由第一锁相环pll1估计的转子位置θ
obs
来确定谐波。谐波状态观测器obs还从测量信号y确定由严格大于1阶的谐波的抑制形成的信号y_hf。相位差校正器corφ标识并校正相位差以及测量信号y_hf的偏移和振幅,以从所标识的谐波形成经校正信号yd。第一锁相环pll1从经校正信号yd估计所估计的转子位置θ
obs
。对于该第一实施例,通过第一锁相环pll1获得所估计的转子位置和/或速度。
[0061]
根据本发明的第二实施例的方法包括以下步骤:
[0062]
1)谐波的确定
[0063]
2)谐波观测器收敛的确定
[0064]
3)所观察的谐波的校正
[0065]
4)测量信号的校正
[0066]
5)转子位置和/或速度的确定。
[0067]
这些步骤在本说明书的其余部分中详述。这些步骤可以由计算机系统或电子系统、尤其是控制该电机的计算机或电子系统来执行。图2藉由非限制性示例示意性地解说了根据本发明的第二实施例的方法的各步骤。位置传感器cap首先生成测量信号y。然后,借助于闭环bf确定这些测量的谐波,该闭环bf包括谐波状态观测器obs、相位差校正器corφ以及第一锁相环pll1。谐波状态观测器obs从测量信号y和从由第一锁相环pll1估计的转子位置θ
obs
来确定谐波h。谐波状态观测器obs还从测量信号y确定由严格大于1阶的谐波的抑制形成的信号y_hf。相位差校正器corφ标识并校正相位差以及测量信号y_hf的偏移和振幅,以从所标识的谐波形成经校正信号yd。第一锁相环pll1从经校正信号yd估计所估计的转子位置θ
obs
。此外,根据本发明的方法包括如果确保谐波状态观测器obs的收敛c,则校正谐波corobs的步骤。经校正谐波用hc表示。此外,根据本发明的方法包括从所确定的经校正谐波hc抑制测量信号y的谐波corh的步骤。经校正信号用yc表示。另外,根据本发明的方法包括第二锁相环pll2,该第二锁相环从信号yc估计转子的位置和/或转子的速度根据本发明的实施例,该方法可以进一步包括反馈由第二锁相环pll2估计的位置用于校正谐波corh。对于该第二实施例,通过第二锁相环pll2获得所估计的转子位置和/或速度。
[0068]
1)谐波的确定
[0069]
该步骤在于使用闭环来确定由位置传感器生成的测量信号的谐波。闭环被理解为一系列步骤,其中这些步骤的输出还被用作在其之前的至少其他步骤的输入。换言之,闭环包括至少一个反馈。
[0070]
闭环包括:
[0071]-谐波状态观测器,其将这些测量信号和所估计的转子位置与测量信号谐波进行相关,并且从这些测量信号中滤除阶数严格大于1的谐波,
[0072]-相位差校正器,其借助于由该谐波状态观测器确定的阶数为小于或等于1的这些谐波来标识和校正这些经滤波的测量信号的振幅、偏移和相位,
[0073]-第一锁相环,其从经校正信号中估计转子的位置,以及
[0074]-由第一锁相环估计的位置到所述谐波状态观测器的输入端的反馈。
[0075]
状态观测器是被表示为状态表示的模型的扩展。当系统的状态是不可测量的时,设计允许状态从动态系统的模型和其他量的测量来重构的观测器。
[0076]
锁相环(pll)是允许将系统的相位或输出频率锁定到输入信号的相位或频率的电子或计算机组件。其还可以将输出频率锁定到输入频率的倍数。第一锁相环提供更好的谐波标识。
[0077]
根据本发明的实施例,谐波状态观测器可以针对阶数为k的每个谐波使用以下形式的传递函数:
[0078][0079]
其中s是拉普拉斯参数,α是状态观测器增益,k是所考虑的谐波的阶数,n是测量信号的谐波数目,ω是基波频率,其中θ=ω*t,θ是角位置,y是在余弦和正弦信号之间考虑的所生成的信号,以及是在余弦和正弦信号之间考虑的所生成的信号的k阶的所估计谐波。
[0080]
有利地,状态观测器增益α可以被确定为小于基波频率ω。优选地,状态观测器增益α可以小于基波频率ω的十分之一。增益α允许调整谐波状态观测器的收敛。根据实施例示例,增益α可以是10。该值提供快速收敛,而没有观测到的信号的显著变形。
[0081]
根据一实施例,该传递函数可以通过以下操作来确定:
[0082]
分别由ya和yb表示的包含谐波的测量信号可以写作如下:
[0083]
ya=l
0a
+l
1a
sin(θ)+l
2a
sin(2θ+φ
a2
)+l
3a
sin(3θ+φ
a2
)+
…
+l
na
sin(nθ+φ
an
)
[0084]
yb=l
0b
+l
1b
cos(θ+φ)+l
2b
sin(2θ+φ
b2
)+l
3b
sin(3θ+φ
b2
)+
…
+l
nb
sin(nθ+φ
bn
)
[0085]
或:
[0086]
ya=l
0a
+l
11a
sin(θ)+l
12a
cos(θ)+l
21a
sin(2θ)+l
22a
cos(2θ)+l
31a
sin(3θ)+l
32a
cos(3θ)+
…
+l
n1a
sinnθ)+l
n2a
cos(nθ)
[0087]
yb=l
0b
+l
11b
sin(θ)+l
12b
cos(θ)+l
21b
sin(2θ)+l
22b
cos(2θ)+l
31b
sin(3θ)+l
32b
cos(3θ)+
…
+l
n1b
sin(nθ)+l
n2b
cos(nθ)
[0088]
在这些等式中并且在说明书的其余部分中,下标a表示第一测量信号(例如,余弦信号)并且下标b表示第二测量信号(例如,正弦信号)。在这些等式中,θ=ω*t,其中ω是基波频率,l
11a
、l
12a
、l
12a
、l
12b
是测量信号的基波系数(即,与谐波的基波相关的系数),l
i1s
、l
i2a
、l
ilb
、l
i2b
(其中,i范围在2和n之间的范围内,n是所考虑的最高频率的谐波)是测量信号的谐波系数,l
0a
和l
0b
是测量信号的偏移(即,连续偏移)。
[0089]
为了简化书写,向量可以由l和w(没有下标a和b)表示:
[0090]
l=[l
0 l
11 l
12 l
21 l
22
ꢀ…ꢀ
l
n1 l
n2
]
t
,
[0091]
w=[1 sin(θ) cos(θ) sin(2θ) cos(2θ)
ꢀ…ꢀ
sin(nθ) cos(nθ)]
t
[0092]
并且系数的估计的向量可被定义如下:
[0093][0094]
随后我们可写成:
[0095][0096]
根据以下文献:
[0097]-osowski,s.(1992),neural network for estimation of harmonic components in a power system,ieee generation,transmission and distribution(用于估计电力系统中的谐波分量的神经网络,ieee生成、传输和分配)(第129-135页),以及
[0098]-siyu leng,w.l.-y.(2009),active power filter for three-phase current,ieee american control conference(用于三相电流的有源功率滤波器,ieee美国控制会
议),(第2140-2147页),密苏里州,美国,
[0099]
我们可写成:
[0100][0101]
其中p是由以下定义的维度为(2n+1)*(2n+1)的对角矩阵:
[0102]
p=diag(α)
[0103]
其中α是状态观测器增益。
[0104]
系数的估计器然后可以写作如下:
[0105][0106][0107][0108][0109][0110]
…
[0111][0112][0113]
通过去除由表示的谐波和由表示的偏移,可以从这些等式中提取由表示的基波部分的估计:
[0114][0115][0116]
使用拉普拉斯变换以形成以下等式:
[0117][0118]
其中k是谐波阶数。随后我们可写成:
[0119][0120]
其中
[0121][0122]
其中是拉普拉斯变换。
[0123]
我们可写成:
[0124][0125]
然后可以针对k阶的每个谐波写出传递函数:
[0126][0127]
对于基波(k=1),基波与测量y之间的传递函数可被写成:
[0128][0129]
根据本发明的实现,谐波状态观测器可以进一步确定所述谐波的基波系数和这些测量信号的偏移。
[0130]
根据一实施例,对于相位差校正步骤,可以借助于谐波的基波系数来标识这些测量信号之间的相位差、优选地这些测量信号的基波之间的相位差。这种相位差标识可以借助于反正切函数来进行。
[0131]
有利地,借助于以下等式可以确定这些测量信号的基波之间的相位差φ:
[0132][0133]
使用
[0134][0135][0136]
其中,l
1b
是所述所生成的余弦信号和正弦信号之一的基波系数,l
11b
和l
12b
是由所述谐波状态观测器确定的基波系数,δθ是所测得的转子位置与由所述第一锁相环pll估计的转子位置之间的差值。
[0137]
实际上,对于这个步骤,可以进行以下操作:
[0138]
假设且(下标f表示基波),我们可以写出以下等式:
[0139][0140][0141]
其中是转子位置的所估计的值(对应于图1或图2中的θ
obs
)。基波信号系数la和lb可通过以下等式来计算:
[0142][0143]
通过使我们可以写成:
[0144][0145]
随后我们可获得:
[0146][0147][0148]
从这些等式中,我们可以表明:
[0149][0150][0151][0152]
通过注入最后两个等式,可以在以下等式中标识相位差φ:
[0153][0154]
可以从所标识的相位差中校正两个测量信号之一以消除相位差。因此可以借助于针对测量信号的谐波的基波确定的值、基波系数的值和所标识的相位差角来重构没有相位差的信号。根据本发明的一实施例,所述测量信号之一的相位差是通过以下等式来校正的:
[0155][0156]
其中y
fb-correction
是所考虑的测量信号的基波,l
1a
和l
1b
是测量信号的基波系数,y
fa
和y
fb
是测量信号的基波,并且φ是所述相位差。
[0157]
实际上,通过定义:
[0158]yfa
=l
1a
*sin(θ),y
fb
=l
1b
*cos(θ+φ)
[0159]
并且建立通过以下定义的经校正基波信号是合需的:
[0160]yfb-correction
=l
1b
*cos(θ)
[0161]
如果我们使用以下展开:
[0162][0163]
我们可获得:
[0164][0165]
通过用基波信号的定义来代替,我们可以具有:
[0166][0167]
根据本发明的一实施例,该第一锁相环尤其可以包括比例积分控制器和积分器。
[0168]
优选地,第一锁相环可以根据图3的实施例。对于该实施例,第一锁相环包括正弦信号sin(θ)和余弦信号-cos(θ)作为输入。正弦信号sin(θ)乘以与由第一锁相环的输出估计的角位置的余弦相对应的信号(针对此步骤,对应于图1和2的θ
obs
)。余弦信号-cos(θ)乘以与由第一锁相环的输出估计的角位置的正弦相对应的信号。乘法器的各输出然后加在一起。由此获得对应于等于的信号
∈
。然后,信号
∈
通过比例积分pi控制器,用于估计转子的旋转速度pi控制器包括由k
p
表示的比例系数和积分系数ki。该信号随后在积分器中积分,其对应于拉普拉斯域中的函数,以估计转子位置
[0169]
对于该实施例,第一锁相环的传递函数可被写成:
[0170][0171]
其中θ是转子位置,是由第一锁相环估计的转子位置,s是拉普拉斯参数,k
p
是比例积分控制器的比例系数,并且ki是比例积分控制器的积分系数。
[0172]
实际上,第一锁相环允许写成以下关系:
[0173][0174]
借助于线性近似,诸如:
[0175][0176]
可以获得以下等式:
[0177][0178]
这允许获得上述传递函数。
[0179]
根据本发明的一方面,系数k
p
和ki验证针对锁相环的以下不等式k
p
》0和ki》0是稳定的。
[0180]
锁相环的自然频率ω
pll
是
[0181]
为了锁相环的良好性能,确定系数k
p
和ki,使得如下定义的质量因子m
pll
接近于1。
[0182][0183]
对于该第一实施例,通过第一锁相环获得所估计的转子位置和/或速度。
[0184]
对于第二实施例,执行以下描述的步骤2)至5)。
[0185]
2)谐波观测器收敛的确定
[0186]
此步骤在于确定闭环的谐波状态观测器的收敛,以便只有在谐波状态观测器收敛时才能够激活谐波的校正。因此,仅保持良好的谐波估计,并且避免基于非收敛值的校正,这防止了不准确性和转子位置和/或速度确定误差。因此,改善了该转子的位置和/或转速的确定。
[0187]
可以使用任何手段来确定谐波状态观测器的收敛。
[0188]
根据本发明的实施例,谐波状态观测器的收敛可以借助于以下等式来确定:
[0189][0190]
其中ε是预定阈值,ya和yb是测量信号,以及和是从由谐波状态观测器确定的谐波和由第一锁相环确定的位置来重构的所估计信号。
[0191]
根据本发明的一实施例,当在恒定或可变的时间间隔上(例如,在一个或多个电气旋转(electrical revolution)上)验证以上等式时,可以确定观测器收敛。
[0192]
3)所观察的谐波的校正
[0193]
这个步骤在于校正借助于第一锁相环观察到的谐波以便使它们与第二锁相环同步。通常,两个锁相环的电气位置相差由δθ
pll
表示的量。在此,用θ表示的参考位置是由运动学快于第一锁相环的第二锁相环来估计的。观测器被认为是收敛的。然后,对于例如由a表示的正弦信号,我们具有:
[0194][0195][0196]
即:并且
[0197]
求与第二锁相环相关联的谐波的值:
[0198]
并且
[0199]
计算以下值:
[0200][0201][0202]
应注意,以上计算包括:针对每个谐波,观察到的谐波的补偿旋转等于由两个锁相环观察到的角度差乘以所考虑的谐波的阶数的角度。
[0203]
根据本发明的一实施例,可以如下所述地确定量δθ
pll
。请注意,我们已经通过如下定义提出(y
1a
是系统的相位参考):
[0204]y1a
=l
11a
*sin(θ)
[0205]
因此,根据定义l
12a
是0,以及φ
a1
。
[0206]
如果我们再次使用应用于谐波1的等式我们发现::并且类似地:我们可以从
中计算l
ka
和δθ
pll
。
[0207]
4)测量信号的校正
[0208]
这个步骤在于仅当在步骤2中已经确定谐波状态观测器收敛时,持续地校正这些测量信号以便消除在步骤1)中确定的和在步骤3)中校正的谐波的影响。换言之,当谐波状态观测器提供可靠的观测时,激活测量信号的校正。
[0209]
当谐波状态观测器不收敛时,借助于当观测器收敛时观测的最后谐波值来校正测量信号,并且在步骤5中使用这些信号)。
[0210]
根据本发明的实施例,可以通过过滤在步骤1)和3)中确定的谐波持续地校正测量信号。
[0211]
对测量信号中的谐波进行滤波是通过以下来获得的:
[0212]
yc=y-l
0a-l
21a
sin(2θ)-l
22a
cos(2θ)-l
31a
sin(3θ)-l
32a
cos(3θ)
‑…‑
l
n1a
sin(nθ)-l
n2a
cos(nθ)
[0213]
根据本发明的实施例,信号的相位差、幅值和偏移yc然后可以通过与在步骤1中使用的方法相同的方法进行校正)。
[0214]
5)转子位置和/或速度的确定
[0215]
这个步骤在于在谐波状态观测器收敛时借助于第二锁相环从经校正测量信号(在步骤3结束时)确定转子的位置和/或速度,并且在谐波状态观测器发散时从未经校正测量信号确定转子的位置和/或速度。
[0216]
第二锁相环可具有与第一锁相环(根据图3)相同的结构。组成元件和传递函数与步骤1中描述的那些相同。然而,pi控制器的系数可以不同。具体地,第一锁相环的积分系数ki可以小于第二锁相环的积分系数ki。第一锁相环的积分系数ki可以与机械系统的谐振相关,而第二锁相环的积分系数ki可以取决于电带宽。因此,第一锁相环具有比第二锁相环更慢的运动学。
[0217]
此外,本发明涉及一种控制电机的方法,该电机包括用于确定该电机的转子的角位置的传感器。位置传感器生成余弦信号和正弦信号。该控制方法包括以下步骤:
[0218]
a)借助于根据上述变型或变型组合中的任一者来确定转子位置和/或速度的方法来确定转子的位置和/或速度,该方法被应用于位置传感器的测量信号,以及
[0219]
b)根据所确定的位置和/或速度来控制该电机。
[0220]
根据本发明的一实施例,该电机的扭矩或转速尤其可以被控制。
[0221]
本发明还涉及一种监测电机的方法,该电机包括用于确定该电机的转子的角位置的传感器。位置传感器生成余弦信号和正弦信号。该监测方法包括以下步骤:
[0222]
a)借助于根据上述变型或变型组合中的任一者来确定转子位置和/或速度的方法来确定转子的位置和/或速度,该方法被应用于位置传感器的测量信号,以及
[0223]
b)根据所确定的位置和/或速度来监测该电机。
[0224]
根据本发明的一实施例,该监测方法可以包括诊断异常电机操作的步骤。在这种情况下,该监测方法可以包括电机控制步骤以便考虑该电机的异常操作。例如,在异常电机操作的情况下的控制可以包括停止该电机。
[0225]
显然,本发明不限于通过示例的方式描述的上述步骤的实施例,并且它涵盖所有变型实施例。
[0226]
示例
[0227]
根据本发明的方法的特征和优点将通过阅读下面的应用示例而清楚。
[0228]
该示例模拟根据本发明的第二实施例的确定转子的位置和速度的方法。对于该模拟,我们考虑以下形式的理论测量信号:
[0229]
ya=0.95*sin(ωt)+0.05+0.09*sin(2ωt)-0.04*cos(2ωt)+0.02*sin(3ωt)+wa,
[0230]
yb=1.05*cos(ωt+φ)+0.03-0.086*sin(2ωt)+0.051*cos(2ωt)
‑‑
0.025*cos(3ωt)+wb,
[0231]
对于该示例,基波相位差φ的值是3
°
,噪声由wa和wb表示,并且谐波状态观测器的增益α是10。
[0232]
图4解说了用于模拟的以rad/s为单位的参考转速ω
ref
作为以s为单位的时间t的函数的演变。所考虑的转速ω
ref
包括五个阶段:在0与3s之间的第一阶段,具有转速ω
ref
的轻微增加;在3与4s之间的第二阶段,具有转速ω
ref
的急剧增加;在4与5.5s之间的第三阶段,转速ω
ref
稳定;在5.5与7s之间的第四阶段,转速ω
ref
的急剧减少;以及在7与10s之间的第五阶段,转速ω
ref
稳定。
[0233]
对于该模拟,我们使用根据图3中解说的结构的两个锁相环。对于第一锁相环,我们选择60rad/s的固有频率ω
pll
,这意味着积分系数ki是3600。对于第二锁相环,我们选择400rad/s的固有频率ω
pll
,这意味着积分系数ki是160000。对于第一锁相环,比例系数k
p
的值是120。对于第二锁相环,比例系数k
p
的值是800。因此,对于每个锁相环,质量因子m
pll
的值是1。
[0234]
对于该示例,图5解说了在第二锁相环的输出处用根据本发明的方法估计的作为时间t(以s为单位)的函数的旋转速度ω
est
(以rad/s为单位)。图6解说了在第二锁相环的输出处,通过根据本发明的方法估计的角度与参考角度之间的作为时间t(以s为单位)的函数的差值δθ(以rad为单位)。首先观察到,所估计的速度类似于参考速度。还应注意,在低速区(最高达约85rad/s)中,谐波观测器尚未被激活,因此存在大的估计误差。然而,一旦转速达到85rad/s的阈值(该阈值基本上对应于第一锁相环的固有频率的倍),谐波观测器就工作,这意味着谐波观测器的收敛,这进而提供了第二锁相环的良好的速度和位置估计。具体地,从第二阶段至第五阶段,速度和位置估计保持可靠。还应注意,当转速减小时(第四阶段),速度和位置估计保持良好,尽管转速小于第二锁相环的固有频率的倍。
[0235]
根据本发明的方法因此允许精确地且可靠地确定电机的转子的位置和转速。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1