电动马达的无传感器位置检测的制作方法
电动马达的无传感器位置检测
1.相关申请的交叉引用
2.本专利申请要求于2020年1月10日提交的美国专利申请第16/739,704号的优先权和所有权益,该美国专利申请据此全文以引用方式并入。
背景技术:
3.车辆通常包括悬架系统。车辆的悬架系统联接到车辆车架和每个轮组件。悬架系统吸收并减弱从轮组件传递到车辆车架的冲击和振动。对于每个轮组件,悬架系统包括上控制臂、下控制臂、线圈弹簧和减震器。减震器延伸穿过线圈弹簧。减震器和线圈弹簧的一端可以连接到下控制臂,并且减震器和线圈弹簧的另一端可以连接到上控制臂或车辆车架。减震器通常是液压或气动的,但是减震器可以替代地是电磁的,其中电动马达用于吸收并减弱由道路表面传递到轮的冲击和振动。
附图说明
4.图1是示例性悬架系统的透视图。
5.图2是示例性电动马达的图。
6.图3是包括电动马达的设备的电路图。
7.图4是用于确定电动马达的磁通链的反馈框图。
8.图5是用于在clarke坐标中确定磁通链圆的圆心的示例性过程的过程流程图。
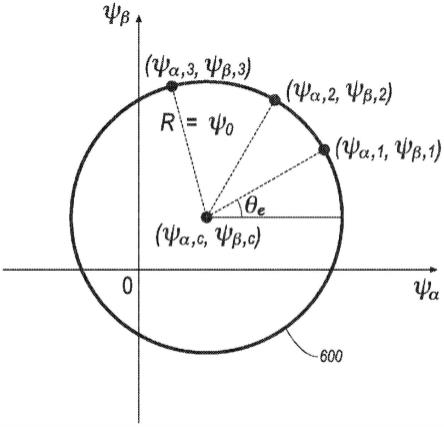
9.图6是clarke坐标中电动马达的磁通链的图。
10.图7a是示出在α维度上电动马达的磁通链与时间关系的曲线图。
11.图7b是示出在β维度上电动马达的磁通链与时间关系的曲线图。
12.图7c是磁通链的加权因子与时间关系的曲线图。
13.图7d是clarke坐标中在第一时间跨度内磁通链的曲线图。
14.图7e是clarke坐标中在第二时间跨度内磁通链的曲线图。
15.图8是用于控制设备的示例性过程的过程流程图。
具体实施方式
16.参考附图,设备30包括电动马达32,该电动马达包括定子34和转换器36;三相逆变器38,该三相逆变器电联接到电动马达32;电源40,该电源电联接到三相逆变器38;和控制器42,该控制器通信地联接到三相逆变器38。控制器42被编程为:确定在不同时间来自电动马达32的磁通链的至少三个测量结果,以clarke坐标表示测量结果,确定由测量结果的clarke坐标限定的圆600的圆心的clarke坐标,并且基于圆600的圆心的clarke坐标来确定转换器36相对于定子34的位置。
17.电动马达32可以用作车辆16的悬架系统18的部件,特别是用作减震器。遵循如下所述方法的电动马达32胜过不同类型的减震器的优点在于可以消除或复核位置传感器。设备30可以用于再生减震,即,用于使用道路振动对电源40进行充电。本文所述的设备30和方
法提供了用于电动马达32的无传感器控制,无论设备30是否是悬架系统18的一部分。省略位置传感器56简化了电动马达32的设计并且提供了大幅度的成本降低。另选地,该方法可以提供对位置传感器56(如果存在的话)的功能的核验。该方法提供了一种有效的方式来补偿在测量穿过电动马达32的磁通链时的错误。该方法避免使用过滤器,并且该方法可以跨宽频率范围甚至是低频率提供关于电动马达32的位置、转换器36相对于定子34的运动的可靠信息。
18.参考图1,车辆16包括车辆车架20、联接到车辆车架20的悬架系统18和联接到悬架系统18的轮组件22。轮组件22能够例如经由悬架系统18相对于车辆车架20垂直地移动。对于车辆16的每个轮组件22,悬架系统18包括上控制臂24、下控制臂26、线圈弹簧28和电动马达32。在悬架系统18的上下文中,电动马达32是电磁减震器。电动马达32用作减震器,并且可以替代传统的液压或气动减震器。电动马达32可以补充线圈弹簧28,或者电动马达32可以替代线圈弹簧28。如果两者都存在,则电动马达32可以延伸穿过线圈弹簧28,如图1所示。电动马达32直接或间接地联接到车辆车架20和轮组件22,使得当轮组件22相对于车辆车架20移动时,转换器36相对于定子34移动,即,使得转换器36与车辆车架20和轮组件22中的一者一起移动,并且定子34与车辆车架20和轮组件22中的另一者一起移动。例如,电动马达32和线圈弹簧28的一端可以连接到下控制臂26,并且电动马达32和线圈弹簧28的另一端可以连接到上控制臂24或车辆车架20。具体地,定子34和转换器36中的一者固定到上控制臂24或车辆车架20,并且定子34和转换器36中的另一者固定到轮组件22。除了图1中所示以外,在悬架系统的其他布置中,电动马达32可以用作减震器。
19.参考图2,电动马达32充当马达同时还充当发电机。电动马达32将电能转换成机械能,反之也将机械能转换成电能。机械能呈现转换器36相对于定子34的移动的形式。在电动马达32用作减震器的上下文中,转换器36可以由于道路不平而相对于定子34移动,并且电动马达32可以响应于由道路引起的运动而抵抗转换器36的运动和/或使转换器移动。
20.如图2所示,电动马达32是永磁同步马达,并且是线性电动马达。电动马达32包括定子34和转换器36,该转换器相对于定子34沿着轴线x移动。另选地,电动马达32可以是旋转电动马达,其中转换器36是相对于定子34绕轴线x旋转的转子。
21.定子34包括磁性材料的芯44和围绕芯44缠绕的电线圈46、48、50。定子34通过电线圈46、48、50接收三相电力,这些电线圈包括第一线圈46、第二线圈48和第三线圈50。供应到线圈46、48、50的交流电源产生磁场,该磁场与转换器36的永磁体52、54的磁场组合,可以对转换器36产生平行于轴线x的力(或者如果电动马达32旋转,则产生绕轴线x的扭矩)。
22.转换器36包括一系列永磁体52、54,具体地,沿轴线x交替(或者如果电动马达32旋转并且转换器36是转子,则围绕轴线x交替)的多个第一永磁体52和第二永磁体54。第一永磁体52具有与第二永磁体54相反的磁定向。
23.参考图3,三相逆变器38电联接到电动马达32。三相逆变器38将来自电源40的直流电转换为交流电递送到线圈46、48、50。三相逆变器38包括三个逆变器开关支脚,每个支脚连接到线圈46、48、50中的一个线圈。
24.电源40电联接到三相逆变器38。电源40向三相逆变器38供应直流电源。电源40可以是一个或多个电池,例如,锂离子电池、镍金属氢化物电池、铅酸电池等;或一个或多个电容器,例如,超级电容器。特别地,电源40可以是超级电容器,因为超级电容器再充电和放电
比电池更快,并且可以经受比电池更多次的充电-放电循环。
25.控制器42通信地联接到三相逆变器38以向三相逆变器38提供控制信号。控制器42可以是基于微处理器的计算装置(例如,电子控制器等)、现场可编程门阵列(fpga)、专用集成电路(asic)等。控制器42包括处理器、存储器等。控制器42的存储器包括用于存储能够由处理器执行的指令以及用于电子存储数据和/或数据库的介质。控制器42可以是联接在一起的多个控制器。
26.设备30可以包括联接到电动马达32的位置传感器56以检测转换器36相对于定子34的位置。位置传感器56可以是提供映射到转换器36相对于定子34的线性(或旋转)位置上的输出的任何传感器,例如,电容式换能器、电容位移传感器、涡流传感器、超声波传感器、霍尔效应传感器、感应非接触式位置传感器、线性可变差分变压器、压电换能器、电位计、接近传感器、线性编码器、弦丝电位计等。如下文关于图8所述,控制器42可以在不使用位置传感器56的情况下确定转换器36相对于定子34的位置,并且可以将该结果与由位置传感器56报告的位置进行比较。另选地,电动马达32可以缺乏位置传感器56,并且控制器42可以用无传感器方式确定转换器36相对于定子34的位置。
27.参考图4,示出了反馈回路400,用于补偿电动马达32的测得的反电动势中的偏移以控制电动马达32。反馈回路400由控制器42执行。控制器42的存储器可以存储用于执行反馈回路400的步骤的可执行指令,或者控制器42可以包括多个控制器,每个控制器被编程为执行图4所示的步骤中的一些步骤,并且这些控制器联接在一起以传输数据,如图4所示。作为反馈回路400的一般概述,从电动马达32接收未补偿的反电动势测量结果emf
αβ,i
*,通过减去比例积分(pi)控制器410的输出来补偿该测量结果中的偏移,所得经补偿的反电动势测量结果emf
αβ,i
被积分器415积分为磁通链测量结果ψ
αβ,i
,在圆心估计器420中使用至少三个磁通链测量结果ψ
αβ,i
来确定由磁通链测量结果ψ
αβ,i
限定的圆600的圆心ψc,确定加权因子kr,在乘法块425中将圆心ψc和加权因子kr相乘,并且pi控制器410基于所得乘积产生补偿以馈送到求和块405。加权因子kr是表示用于确定圆心ψc的磁通链测量结果ψ
αβ,i
的质量的标量。经反馈回路400补偿的电流磁通链ψ
αβ
用于基于转换器36相对于定子34的位置来致动电动马达32。
28.求和块405接收未补偿的反电动势测量结果emf
αβ,i
*,该反电动势测量结果可根据测得的三相电流i
abc
和测得的定子34电压u
abc
来确定。首先,通过使用简化的clarke变换(也称为α-β转换)将三相电流i
abc
和测得的定子电压u
abc
转换为clarke坐标:
[0029][0030][0031]
其中,i电流是电流,u是电压,t是clarke变换,t是时间,并且a、b和c分别表示第一线圈46、第二线圈48和第三线圈50。clarke变换t在几何上被解释为将与电线圈46、48、50相
关联的三部分量投影到两个固定轴线:α轴和β轴,即,clarke坐标。因此,clarke坐标中的所有量都是二维向量。clarke坐标中的未补偿的反电动势测量结果emf
αβ,i
*可以根据clarke坐标中的三相电流i
αβ
和定子电压u
αβ
来确定:
[0032][0033]
其中,rs是定子34的绕组电阻,l
sα
是α维度上的同步电感,l
sβ
是β维度上的同步电感,并且l
sαβ
是互耦。在许多情况下,同步电感项和互耦项的贡献微不足道,并且可以忽略不计。然后,将未补偿的反电动势测量结果emf
αβ,i
*馈送到求和块405中。
[0034]
求和块405从未补偿的反电动势测量结果emf
αβ,i
*中减去来自pi控制器410的补偿,从而得到经补偿的反电动势测量结果emf
αβ,i
。该补偿最初是(0,0),并且保持(0,0)直到圆心估计器420收集到最小数量的测量结果,如下所述。
[0035]
积分器415通过将经补偿的反电动势测量结果emf
αβ,i
对时间积分,从经补偿的反电动势测量结果emf
αβ,i
确定磁通链测量结果ψ
αβ,i
:
[0036][0037]
其中,ψ
αβ
(t0)是初始磁通链。以clarke坐标表示磁通链测量结果ψ
αβ
。积分器415可以包括两个标量计算,一个用于α项,一个用于β项。
[0038]
圆心估计器420需要在不同时间的至少三个磁通链测量结果ψ
αβ,i
,以确定圆600的圆心ψc,如图6所示。图6示出了圆600,其中圆心为ψc=(ψ
α,c
,ψ
β,c
)。圆600和因此圆心ψc由不同时间点的三个磁通链测量结果ψ
αβ,i
,即ψ
αβ,1
=(ψ
α,1
,ψ
β,1
)、ψ
αβ,2
=(ψ
α,2
,ψ
β,2
)、ψ
αβ,3
=(ψ
α,3
,ψ
β,3
)来限定。通过收集至少四个磁通链测量结果ψ
αβ,i
,超定了圆心ψc,并且圆心估计器420可以使用最小二乘法估计来确定圆心ψc。在过程500中,圆心估计器420确定圆600的圆心ψc和加权因子kr,该过程如下所述。在乘法块425中将圆心ψc和加权因子kr相乘,并且将所得加权圆心krψc馈送给pi控制器410。
[0039]
pi控制器410将成比例补偿和积分补偿提供给圆心ψc,特别是加权圆心krψc。加权圆心krψc提供成比例补偿和积分补偿的误差函数,并且(0,0)是设定值。通过输出给求和块405,pi控制器410形成反馈回路400,在反馈回路中,磁通链ψ
αβ
受到成比例补偿和积分补偿,并且然后变成用于确定圆600的圆心ψc的磁通链测量结果ψ
αβ,i
中的一个磁通链测量结果。成比例补偿和积分补偿各自校正圆心ψc的偏移。成比例补偿校正初始磁通链ψ
αβ
(t0)。积分补偿校正偏移电压。pi控制器410可以包括两个标量计算,一个用于α项,一个用于β项。
[0040]
反馈回路400的输出是电流磁通链ψ
αβ
,其受到补偿,使得圆心ψc等于(0,0)。当圆心ψc校正为(0,0)时,电流磁通链ψ
αβ
=(ψ
α
,ψ
β
)提供转换器36相对于定子34的位置。具体地,电流磁通链ψ
αβ
的角度θe将一对一地映射到转换器36相对于定子34沿着轴线x的线性位置,因此可以将角度θe视为转换器36相对于定子34的位置。如果电动马达32旋转,则角度θe直接描述转换器36相对于定子34上的固定参考点围绕轴线x的旋转位置。位置θe可以由等式θe=arctan(ψ
β
/ψ
α
)给出。控制器42基于转换器36相对于定子34的位置θe来致动电动马
达32。例如,控制器42指示三相逆变器38基于转换器36的实际位置θe将转换器36移动到目标位置。目标位置可以是例如转换器36在吸收了来自道路的冲击之后返回到的固定位置。
[0041]
图5是示出示例性过程500的过程流程图,该过程用于确定圆600的圆心ψc和加权因子kr,即,在反馈回路400中由圆心估计器420执行的步骤。控制器42的存储器存储用于执行过程500的步骤的可执行指令。作为过程500的一般概述,控制器42收集磁通链测量结果ψ
αβ,i
,确定圆600的圆心ψc,并且确定加权因子kr。
[0042]
过程500开始于框505,在此处控制器42收集磁通链测量结果ψ
αβ,i
。为了确定圆600的圆心ψc,控制器42需要至少三个磁通链测量结果ψ
αβ,i
。通过收集至少四个磁通链测量结果ψ
αβ,i
,超定了圆心ψc,并且控制器42可以使用最小二乘法估计来确定圆心ψc。
[0043]
接下来,在框510中,控制器42确定圆600的圆心ψc。具体地,控制器42通过应用等式(其中剑形符号上标表示矩阵的伪逆(也称为moore-penrose逆矩阵))、通过应用最小二乘估计来计算圆心ψc,并且a和b由以下给出
[0044][0045][0046]
其中,ψ
α,i
是clarke坐标中α维度上的第i个磁通链测量结果,ψ
β,i
是clarke坐标中β维度上的第i个磁通链测量结果,并且n是磁通链测量结果的数量。a的伪逆由以下给出:其中t是转置算子。圆心ψc可以使用以下等式来计算,相当于
[0047][0048]
其中,a
i1
是矩阵a第i行第一列中的元素,即,a
i1
=ψ
α,i-ψ
α,i+1
;a
i2
是矩阵a第i行第二列中的元素,即,a
i2
=ψ
β,i-ψ
β,i+1
;并且bi是矩阵b第i行中的元素,即,bi=1/2(ψ
α,i2-ψ
α,i+12
+ψ
β,i2-ψ
β,i+12
)。如果控制器42已经确定了圆心ψc至少一次,则控制器42仅需要更新每个矩阵a和b中的底部行,并且向上移动剩下的行,即,使第i行成为第i
–
1行。因此,对于上述等式中的每个求和项,可以通过以下过程来计算新求和项:从先前的求和项结果开始,减去用于自变量i=1,并且加上自变量i=n;例如,对于求和项新结果是先前的结果减去a
11
b1加上a
n1bn
。此迭代更新允许有效地使用计算资源。
[0049]
接下来,在框515中,控制器42确定加权因子kr。加权因子kr表明磁通链测量结果的质量,例如,信噪比。例如,加权因子kr与磁通链测量结果ψ
αβ,i
的矩阵的条件数κ(.)负相关。矩阵的条件数κ(.)是矩阵的最大奇异值与矩阵的最小奇异值的比,即,κ(m)=σ
max
(m)/σ
min
(m),其中m是任意矩阵。条件数范围从1到无穷大,其中值接近1表示涉及矩阵m的计算将放大噪声相对较小的倍数,并且大的值表示涉及矩阵m的计算将放大噪声相对较大的倍数。具体地,加权因子kr由以下形式的等式给出:
[0050][0051]
其中,x是正数。特别地,x可以等于2。加权因子kr的范围从0到1,其中接近0的值表示在计算圆心ψc时存在大量噪声,并且接近1的值表示在计算圆心ψc时存在少量噪声。在框515之后,过程500结束。在运行反馈回路400时,控制器42可以执行过程500若干次,例如,每控制器42的时间步长执行一次。
[0052]
图7a至图7e是示出在运行反馈回路400的过程期间圆心ψc的收敛。图7a和图7b示出了磁通链的元素ψ
αβ
=(ψ
α
,ψ
β
)随时间的变化,其中虚线表示磁通链的真值ψ
αβ
,并且实线表示由反馈回路400输出的磁通链ψ
αβ
的值。图7c示出了加权因子kr随时间的变化。当加权因子kr接近0时,pi控制器410提供相对更少的补偿,并且当加权因子kr接近1时,pi控制器410提供相对更多的补偿。图7d示出了clarke坐标中磁通链ψ
αβ
的迹线,从在t=0的初始位置(0,0)开始,并且在t=1之前收敛到以(0,0)为圆心的圆600。图7e也示出了clarke坐标中磁通链ψ
αβ
的迹线,但是仅针对t=0.8至t=1这一段,在这之前磁通链ψ
αβ
已经收敛到以(0,0)为圆心的圆600。
[0053]
图8是示出用于控制设备30的示例性过程800的过程流程图。控制器42的存储器存储用于执行过程800的步骤的可执行指令。作为过程800的一般概述,在框805中,控制器42根据反馈回路400连续地执行磁通链调节;在框810中,基于转换器36相对于定子34的位置来连续地致动电动马达32;在框815中,任选地将电动马达32作为发电机操作以对电源40进行充电;在框820中等待测得的磁通链稳定之后,(在决策框830中)连续地比较根据反馈回路400得到的位置与在框825中从位置传感器56接收的位置;并且在框835中,如果报告的位置之间的差值大于阈值,则提供警告。“持续地”执行步骤意味着在过程800移动到下一个步骤时控制器42继续执行该步骤。因此,图8示出了步骤初始化的顺序,并且一旦初始化,则在执行剩余框的同时,继续执行框805、810和815。如上所述,电动马达32可以被构造成没有位置传感器56,在这种情况下,不执行比较位置和提供警告的步骤。
[0054]
在框805中,控制器42执行上文关于反馈回路400和过程500所述的磁通链调节。反馈回路400输出电流磁通链ψ
αβ
=(ψ
α
,ψ
β
),控制器42用等式θe=arctan(ψ
β
/ψ
α
)从电流磁通链中计算转换器36相对于定子34的位置θe。
[0055]
在框810中,控制器42基于转换器36相对于定子34的位置θe来致动电动马达32。具体地,控制器42指示三相逆变器38基于转换器36的实际位置θe将转换器36移动到目标位置。例如,目标位置可以是转换器36在吸收了来自道路的冲击之后返回到的固定位置。
[0056]
在框815中,控制器42用由电动马达32的移动(即,随着转换器36相对于定子34的移动)产生的电力对电源40进行充电。电动马达32充当发电机。实际上,电动马达32提供再生减震。例如,如果控制器42被编程为操作电动马达32以模拟传统的油基减震器,则电动马达32将重新捕获在常规油基减震器中花费来加热油的一些能量。
[0057]
接下来,在框820中,控制器42等待圆600的圆心ψc稳定到(0,0),即,对于磁通链ψ
αβ
而言稳定到以(0,0)为圆心的圆600,如图7e所示。例如,控制器42可以在过程800开始之
后等待预设时间。预设时间可以实验性地基于磁通链ψ
αβ
通常需要多长时间稳定到圆600来选择。又如,控制器42可以等待直到圆心ψc处于距离(0,0)预设距离内达预设时间。预设距离可以被选择为微不足道得小,并且预设时间可以被选择为足够长,以指示圆心ψc已经稳定,而不是偶然地落在(0,0)上。在等待时,控制器42如框805至框815中所述继续执行磁通链调节,致动电动马达32,并且对电源40进行充电。
[0058]
接下来,在框825中,控制器42从位置传感器56接收指示转换器36相对于定子34的位置θ
p
的数据。
[0059]
接下来,在决策框830中,控制器42确定来自传感器的转换器36的位置θ
p
与基于圆600的圆心ψc的转换器36的位置θe之间的差值是否超过阈值δθ*,即,是否δθ=|θ
p-θe|》δθ*。阈值δθ*可以基于位置传感器56的已知分辨率或噪度来选择。如果差值大于阈值,即δθ》δθ*,则过程800前进到框835。如果差值小于阈值,即δθ《δθ*,则过程800结束或重新开始。
[0060]
在框835中,控制器42提供警告。例如,控制器42可以向车辆16的车载故障诊断系统发射指示故障并且含有适当代码的诊断故障代码(dtc)。在框835之后,过程800结束。
[0061]
已经以说明性方式描述了本公开,并且应当理解,已经使用的术语旨在具有词语的描述性质而不是限制。在整个此文档中使用形容词“第一”和“第二”作为标识符,并且不旨在表示重要性、顺序或数量。根据上述教导,本公开的许多修改和变型是可能的,并且本公开可以不同于具体描述的方式进行实践。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1