开关磁阻电机相电流估测方法
1.本发明涉及开关磁阻电机传感器领域。
背景技术:
2.在控制系统中,传感器是获得时变参数的常用手段。然而,由于传感器的使用会导致系统成本的上升以及可靠性的降低。各种代替传感器的时变参数估测方法不断被提出。然而,到目前为止,对于开关磁阻电机,关于电流的可观测模型尚未被找到。因此,传统的闭环观测器方法无法用于开关磁阻电机的电流估测。为降低开关磁阻电机系统的成本及提高其可靠性,有必要研究一种适合于开关磁阻电机的电流估测方法。
技术实现要素:
3.本发明提出的开关磁阻电机相电流估测方法如下。
4.一种开关磁阻电机相电流估测方法,其特征在于:
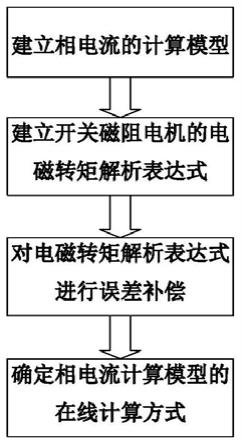
5.该开关磁阻电机相电流估测方法对应的开关磁阻电机上安装有一个测量相电流总和的电流传感器。开关磁阻电机的功率变换器采用不对称半桥功率变换器或其它适用于开关磁阻电机的功率变换器。所述相电流估测方法依次包括以下步骤:1、建立相电流的计算模型;2、建立开关磁阻电机的电磁转矩解析表达式;3、对所述步骤2中的电磁转矩解析表达式进行误差补偿;4、确定所述相电流计算模型的在线计算方式。
6.所述的相电流计算模型如下:其中,t(i
c1
,θ
c1
)为前一相导通绕组电流产生的电磁转矩,t(i
c2
,θ
c2
)为后一相导通绕组电流产生的电磁转矩,i
c1
为前一相导通绕组电流值,i
c2
为后一相导通绕组电流值,θ
c1
为前一导通相的相对转子位置,θ
c2
为后一导通相的相对转子位置,相对转子位置为转子相对定子的位置,某一相的相对转子位置即转子相对该相定子的位置。t
l
为负载转矩,j为转动惯量,d为粘性摩擦系数,acc为电机转子的角加速度,ω为电机转子的角速度,i
s
为所述电流传感器的电流测量值,该电流测量值为相电流总和。
7.采用分段建模方法建立所述电磁转矩解析表达式,依相对转子位置进行分段,在每个相对转子位置区间的电磁转矩解析表达式如下:其中,t(i,θ)为电磁转矩,i为相电流值,θ为相对转子位置,d
x
(θ)为关于相对转子位置的给定表达式,c
x
(i)为关于相电流的待定表达式。c
x
(i)的求解方法如下:其中,θ
y
为某一固定的相对转子位置,t
y
(i,θ
y
)为θ
y
处的电磁转矩表达式。式(4)满
足如下两个条件:
①
(d
x
(θ1),d
x
(θ2)
…
d
x
(θ
n
))为线性无关向量组;
②
m=n。求解式(4),得到c
x
(i)的表达式,由此得到电磁转矩解析表达式。
8.由于所述的电磁转矩解析表达式存在误差,因此t(i
m1
,θ
c1
)+t(i
m2
,θ
c2
)
‑
t
l
≠j
×
acc+d
×
ω
ꢀꢀꢀ
(5)其中,i
m1
为前一相导通绕组测量电流值,i
m2
为后一相导通绕组测量电流值。设e(acc,ω)为误差补偿函数,使t(i
m1
,θ
c1
)+t(i
m2
,θ
c2
)
‑
t
l
=j
×
acc+d
×
ω+e(acc,ω)
ꢀꢀꢀ
(6)
9.定义参数comp=t(i
m1
,θ
c1
)+t(i
m2
,θ
c2
)
‑
t
l
=j
×
acc+d
×
ω+e(acc,ω)。在不同的acc和不同的ω下计算t(i
m1
,θ
c1
)+t(i
m2
,θ
c2
)
‑
t
l
获得comp的值,建立表格comp
‑
acc
‑
ω,在线计算中,通过acc和ω查找对应的comp,comp包含e(acc,ω),因此对电磁转矩解析模型具有补偿作用。此时,待求解的相电流计算模型的式(1)转化为:t(i
c1
,θ
c1
)+t(i
c2
,θ
c2
)
‑
t
l
=comp
ꢀꢀꢀ
(7)
10.将式(2)代入式(7),得t(i
s1
,θ
c1
)+t(i
s
‑
i
c1
,θ
c2
)
‑
t
l
=comp
ꢀꢀꢀ
(8)当只有一相绕组被导通时,该相绕组的电流值为所述电流传感器的电流测量值。当有两相绕组被导通时,采用牛顿迭代法求解式(8),得到i
c1
的数值解,再根据式(2)求得i
c2
。至此相电流的估测完成。
11.其中,d
x
(θ)选择为θ
x
‑1、sin(x
×
θ)、cos((x
‑
1)
×
θ)、tan(x
×
θ)、或e
(x
‑
1)
×
θ
其中之一。
12.其中,t
y
(i,θ
y
)通过在θ
y
处的t
‑
i测量数据拟合得到,t为电磁转矩值。拟合函数采用多项式函数。
13.当所述t
y
(i,θ
y
)的拟合多项式函数的最高次项的次数不大于3时,式(8)的求解方法还可以采用公式法。
14.其中,牛顿迭代法的迭代终止条件为下列二者之一:1、设i
c1
(n)为i
c1
的第n次迭代值,i
c1
(n+1)为i
c1
的第n+1次迭代值,ε为给定正数,当|i
c1
(n+1)
‑
i
c1
(n)|≤ε时,停止迭代;2、设e(n)=|i
c1
(n)
‑
i
m1
|,给定误差阈值e
threshold
,当|e(n+1)
‑
e(n)|<e
threshold
时,停止迭代,计算一个转子周期的n的平均值,将该平均值向上取整后作为在线计算的预设迭代次数。
15.给定电流估测阈值,当所述i
c1
的数值解小于电流估测阈值时,认为前一相的相电流下降为零,此时只有一相绕组被导通。
16.本发明的相电流估测方法减少了开关磁阻电机系统中电流传感器的数量,降低了系统成本并提高了系统可靠性。
附图说明
17.图1为本发明所述的开关磁阻电机相电流估测方法的步骤。
18.图2为三相12/8开关磁阻电机的功率变换器以及电流传感器的安装位置。
19.图3为在电流滞环控制方式下,按照本发明所述的开关磁阻电机相电流估测方法的估测结果。
20.图4为在电压斩波控制方式下,按照本发明所述的开关磁阻电机相电流估测方法的估测结果。
具体实施方式
21.本实施例的电机为三相12/8开关磁阻电机。其功率变换器采用不对称半桥功率变换器,电流传感器采用lem传感器,三相绕组的引出线穿过lem传感器中间的孔,如图1所示。
22.定义某一相最小电感处的相对转子位置为0
°
,那么该相最大电感处的相对转子位置为22.5
°
。根据在相对转子位置0
°
、1
°
、2
°
、3
°
、4
°
、5
°
、6
°
、7
°
、8
°
、9
°
、10
°
、11
°
、12
°
、13
°
、14
°
、15
°
、16
°
、17
°
、18
°
、19
°
、20
°
、21
°
、22
°
、22.5
°
、23
°
、24
°
、25
°
、26
°
、27
°
、28
°
、29
°
、30
°
、31
°
、32
°
、33
°
、34
°
、35
°
、36
°
、37
°
、38
°
、39
°
、40
°
、41
°
、42
°
、43
°
、44
°
、45
°
处的t
‑
i测量数据分别拟合得到对应的t
y
(i,θ
y
)。t
y
(i,θ
y
)的拟合函数采用三次多项式函数。d
x
(θ)选择为θ
x
‑1。利用式(4)分别在相对转子位置区间(0
°
,1
°
)、(1
°
,2
°
)、(2
°
,3
°
)、(3
°
,4
°
)、(4
°
,5
°
)、(5
°
,6
°
)、(6
°
,7
°
)、(7
°
,8
°
)、(8
°
,9
°
)、(9
°
,10
°
)、(10
°
,11
°
)、(11
°
,12
°
)、(12
°
,13
°
)、(13
°
,14
°
)、(14
°
,15
°
)、(15
°
,16
°
)、(16
°
,17
°
)、(17
°
,18
°
)、(18
°
,19
°
)、(19
°
,20
°
)、(20
°
,21
°
)、(21
°
,22
°
)、(22
°
,22.5
°
)、(22.5
°
,23
°
)(23
°
,24
°
)、(24
°
,25
°
)、(25
°
,26
°
)、(26
°
,27
°
)、(27
°
,28
°
)、(28
°
,29
°
)、(29
°
,30
°
)、(30
°
,31
°
)、(31
°
,32
°
)、(32
°
,33
°
)、(33
°
,34
°
)、(34
°
,35
°
)、(35
°
,36
°
)、(36
°
,37
°
)、(37
°
,38
°
)、(38
°
,39
°
)、(39
°
,40
°
)、(40
°
,41
°
)、(41
°
,42
°
)、(42
°
,43
°
)、(43
°
,44
°
)、(44
°
,45
°
)上求解c
x
(i)并得到其电磁转矩表达式。由此得到的电磁转矩表达式为t(i,θ)=f1(θ)
×
i3+f2(θ)
×
i2+f3(θ)
×
i+f4(θ)
ꢀꢀꢀ
(9)其中,f1(θ)、f2(θ)、f3(θ)、f4(θ)均为关于θ的函数。
23.当只有一相绕组被导通时,该相绕组的电流值为传感器的电流测量值。当有两相绕组被导通时,采用牛顿迭代法求解式(8),得到i
c1
的数值解,设f(i
c1
)=(f1(θ
c1
)
‑
f1(θ
c2
))
×
i
c13
+(f2(θ
c1
)+f2(θ
c2
)+3
×
f1(θ
c2
)
×
i
s
)
×
i
c12
+(
‑3×
f1(θ
c2
)
×
i
s2
‑2×
f2(θ
c2
)
×
i
s
+f3(θ
c1
)
‑
f3(θ
c2
))
×
i
c1
+f1(θ
c2
)
×
i
s3
+f2(θ
c2
)
×
i
s2
+f3(θ
c2
)
×
i
s
+f4(θ
c1
)+f4(θ
c2
)
‑
t
l
‑
comp
ꢀꢀꢀ
(10)其迭代方程为i
c1
(n+1)=i
c1
(n)
‑
f(i
c1
)/f
′
(i
c1
)
ꢀꢀꢀ
(11)其中,f
′
(i
c1
)为f(i
c1
)的导函数。迭代终止条件选择为所述迭代终止条件2。给定误差阈值e
threshold
设为0.1a。由此得到的预设迭代次数为2。其迭代结果为i
c1
的数值解,再根据式(2)求得i
c2
。
24.给定电流估测阈值设为0.1a。
25.给定目标转速为600转/min,给定负载转矩为0.2n
·
m,分别在电流滞环控制方式和电压斩波控制方式下验证了本发明的相电流估测效果,见说明书附图3
‑
4。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1