一种多虚拟同步发电机VSG并网控制环路间交互影响的定量分析方法
一种多虚拟同步发电机vsg并网控制环路间交互影响的定量分析方法
技术领域
1.本发明涉及电力系统低频振荡技术领域,具体涉及一种多虚拟同步发电机(virtual synchronous generator,vsg)并网控制环路间交互影响的定量分析方法。
背景技术:
2.随着光伏、风电等分布式能源在电力系统中装机规模的扩大,具有良好可控性和灵活性的电力电子变换器在电网中的渗透率逐渐提高,导致电力系统的惯性和阻尼缺乏,不利于系统的安全可靠运行。为了维持系统的电压和频率稳定,有学者提出了vsg的概念,其通过模拟同步发电机的转子运动方程为系统提供惯性和阻尼支撑。然而,当多vsg并联并网运行时,公共连接点(point of common coupling,pcc)的频率通常被认为是恒定的,即不考虑电网阻抗的耦合作用,vsg的运行不受其他并联vsg输出波动的影响。实际上,由于电网等值阻抗的存在,多个并联vsg通过pcc点耦合在一起产生交互影响,使得多vsg并网运行特性更加复杂。
3.目前,针对多逆变器并联系统控制环路间的交互作用研究主要集中于两方面:一方面是多逆变器并网系统电流控制环路的交互影响分析,其通常基于构建多逆变器并联系统的阻抗模型展开研究。另一方面是多vsg并网系统控制环路间的交互影响分析,可通过构建系统的状态空间模型或机械导纳模型展开研究,但是当拓展到多机并联系统时,状态空间法易产生“维数灾”问题。相比于多逆变器并网电流控制环路的交互影响分析,对多vsg并网控制间交互影响的定量分析研究尚不多见。维持系统频率稳定是保证并网vsg安全稳定运行的一项重要指标,因此,有必要针对扰动下多vsg并网系统输出角频率间的交互影响进行定量分析。
4.发明目的
5.本发明的目的在于解决现有技术中所面临的问题,提出一种基于相对增益矩阵(relative gain array,rga)原理的多vsg并网控制环路间交互影响的定量分析方法。
技术实现要素:
6.本发明提出了一种多虚拟同步发电机vsg并网控制环路间交互影响的定量分析方法,该方法包括以下步骤:
7.步骤s1:构建多vsg并网系统的机械导纳模型;
8.步骤s2:推导出vsg输出角频率的传递函数矩阵;
9.步骤s3:基于频率的相对增益矩阵rga原理,对vsg输出角频率的传递函数矩阵进行分析,确定vsg控制通道间交互影响的程度;
10.步骤s4:根据并网vsg台数、虚拟惯性、阻尼系数及电网阻抗变化时vsg控制通道间交互作用的变化规律,确定出vsg易产生交互影响的频率范围。
11.优选地,所述步骤s1进一步包括:
12.采用单机并网模式下的功频调节特性分析模型,将同步环节、阻尼环节和惯性环节均视为两端元件,得出功率与角频率的关系如式(1)所示:
[0013][0014]
其中,ω
s
为系统参考角频率;k
s
=eu
c
/z为同步系数,e为vsg输出电压值,u
pcc
为pcc的电压初始值,z为vsg传输阻抗,即输出阻抗与线路阻抗z
line
之和;j为vsg转动惯量,d为阻尼/下垂系数;ω0为系统的参考角频率,δ表示在平衡点上的小扰动量,δω为角速度的小扰动量,δp
d
、δp
e
及δp
in
分别为阻尼功率增量、同步功率增量及输入功率增量;
[0015]
电感l、电阻r和电容c存在如下式(2)所示的电压、电流关系:
[0016][0017]
其中:i
l
、i
r
分别为流过电感和电阻的电流,i
s
为电流源输出的电流;
[0018]
根据机电比拟原理,将vsg的转子运动方程类比为机械网络,依据元件的串、并联关系求出反映vsg输出功率和角速度响应关系的机械导纳y
a
和y
b
。其中,y
a
为第一机械导纳y
a
=jω
s
s+dω
s
,y
b
为第二机械导纳
[0019]
基于多vsg并网系统的拓扑结构,构建多台vsg并网系统的机械导纳模型,其中,电网阻抗的机械导纳y
g
(s)=k
g
/s,k
g
=u
g
u
pcc
cosδ
g0
/x
g
,其中,u
g
为电网电压的初始值,x
g
为电网电抗,δ
g0
为电网电压和pcc点电压的初始相角差。
[0020]
优选地,所述步骤s2中,由单vsg并网模式下的功频小信号模型得出功率环的输出角频率,如式(3)所示:
[0021][0022]
其中,为vsg角频率的小扰动量,为公共连接点(point of common coupling,pcc)交流母线频率的小扰动量,ω
s
为系统参考角频率,是转子角度的小扰动量,k
p
=e0u
pcc
/z0为同步系数,e0为vsg输出电压,u
pcc
为pcc点电压初始值,z0为vsg传输阻抗,包括输出阻抗与线路阻抗,j为vsg转动惯量,d为阻尼/下垂系数;
[0023]
根据步骤s1所构建的多vsg并网系统的机械导纳模型,根据kirchhoff定律,求得pcc处频率满足式(4)所示关系:
[0024][0025]
将式(4)代入式(3),得到第m台vsg角频率如式(5)所示:
[0026][0027]
其中,rm(s)、hm,t(s)和sm(s)分别为vsg自身有功指令输入、与其它并网vsg的交互作用以及电网频率扰动产生的响应,并满足式(6)
‑
(8)所示的关系:
[0028][0029][0030][0031]
优选地,所述步骤s2中推导出vsg输出角频率的传递函数矩阵,即将n个vsg的输出角频率表达式写成如式(9)和式(10)所示的矩阵形式:
[0032][0033][0034]
优选地,所述步骤s3中采用rga原理对所述传递函数矩阵进行分析,具体为:
[0035]
式中:表示hadamard乘积,即矩阵中的对应元素进行相乘;g(s)表示mimo控制系统的传递函数矩阵,
[0036]
当s=jω=0时,rrga[g(0)]表示mimo控制系统稳态时不同控制回路间的相对增益矩阵;
[0037]
当s=jω=j2πf时,r
rga
[g(s)]表示在不同频率下mimo控制系统控制回路间的动态相对增益矩阵;
[0038]
通过矩阵r
rga
[g(s)]定量分析mimo控制系统不同控制回路间的交互影响,确定出系统最易产生交互影响的频率范围。
[0039]
优选地,所述步骤s3中采用相对增益矩阵r
rga
[g(s)]中的对角元素λ
ii
表征系统vsg控制环路间的交互影响程度;
[0040]
当0<λ
ii
<1时,表示系统不同控制通道间存在正交互影响,有利于抑制不同控制回
路间的交互作用;
[0041]
当λ
ii
=1时表示控制通道间不存在交互影响;
[0042]
当λ
ii
>1时,表示系统不同控制通道间存在负交互影响。
[0043]
更优选地,当λ
ii
∈[0.8 1.2]时,表示控制通道间的交互影响较小,且λ
ii
距离1越近,交互影响越小;
[0044]
当λ
ii
∈[0.8 1.2]或λ
ii
∈[1.5∞]时,表示控制系统交互影响较大,控制通道受耦合作用影响较严重。
[0045]
优选地,所述步骤s4中采用控制单一变量的方法,分别研究并网vsg台数、虚拟惯性、阻尼系数及电网阻抗变化时vsg控制通道间交互作用的变化规律。
[0046]
优选地,所述步骤s4中确定vsg易产生交互影响的频率范围,进一步包括以下子步骤:
[0047]
子步骤s41、设置待考察的频率范围[f1,f2],步长为δf;
[0048]
子步骤s42、构建频率为f1时的系统传递函数矩阵g(s),基于rga原理求解得到频率为f1时的相对增益λ
ii
;
[0049]
子步骤s43、改变频率f1为f1=f2+δf,记录此时的相对增益λ
ii
,直至f2≤f1;
[0050]
子步骤s44、绘制频率在[f1,f2]范围内的λ
ii
,即可得到相对增益曲线,由此可确定vsg控制通道间产生交互影响的区间。
[0051]
进一步优选地,通过绘制有功功率指令输入扰动下vsg输出角频率响应的传递函数的幅频增益曲线,根据幅频增益曲线中幅频增益峰处的频率,进而确定vsg控制通道间交互影响的频率考察范围。
附图说明
[0052]
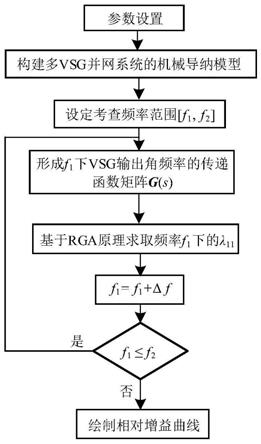
图1为本发明的基于rga原理的vsg交互影响定量分析流程图;
[0053]
图2为本发明的并网模式下vsg功频小信号模型;
[0054]
图3为本发明采用的多vsg并联并网系统的配置图;
[0055]
图4为本发明构建的功率环路等效的二端网络;
[0056]
图5为本发明构建的多vsg并网系统机械导纳模型;
[0057]
图6为本发明实施例中虚拟惯量j波动时相对增益λ
11
的变化规律;
[0058]
图7为本发明实施例中电网阻抗l
g
波动时相对增益λ
11
的变化规律。
具体实施方式
[0059]
下面结合附图,对本发明作详细说明。
[0060]
本发明公开了一种多vsg并网控制环路间交互影响的定量分析方法,建立了多vsg并网系统的机械导纳模型,推导出各台vsg输出角频率的传递函数矩阵。基于频率的rga原理对vsg输出角频率的传递函数矩阵进行分析,进而确定vsg控制通道间的交互影响程度。研究了并网vsg台数、虚拟惯性系数、阻尼系数及电网阻抗变化时vsg不同控制通道间交互作用的变化规律,从而确定易产生交互影响的频率范围。
[0061]
图1为本发明的基于rga原理的vsg交互影响定量分析流程图,有图可知,首先进行参数设置,接着构建多vsg并网系统的机械导纳模型,具体实施中采用类比法构建模型;然
后设定考查频率范围[f1,f2],再接着,形成频率f1下vsg输出角频率的传递函数矩阵g(s);之后,基于rga原理求取频率f1下的λ
11
,将f1表示为f1=f1+δf,如果f1≦f2则返回重新形成传递函数矩阵,如果f1﹥f2,则绘制相对增益曲线。
[0062]
具体来说,本发明所述定量分析方法包括以下步骤:
[0063]
步骤s1:采用类比法构建多vsg并网系统的机械导纳模型。
[0064]
单机并网模式下的功频调节特性分析模型如图2所示。图中,为vsg角频率的小扰动量;为公共交流母线频率的小扰动量;ω
s
为系统参考角频率;是转子角度的小扰动量;同步系数k
p
=eu
pcc
/z,e为vsg输出电压值,u
pcc
为pcc的电压初始值,z为vsg传输阻抗(输出阻抗与线路阻抗z
line
之和),j为vsg转动惯量,d为阻尼/下垂系数。
[0065]
将图2中的同步环节、阻尼环节和惯性环节均视为两端元件,可得功率与角频率的关系如式(1)所示。
[0066][0067]
其中,k
s
=eu
c
/z为同步系数,其中,u
c
为母线电压初始值,ω0为系统的参考角频率。δ表示在平衡点上的小扰动量,δω为角速度的小扰动量,δp
d
、δp
e
及δp
in
分别为阻尼功率增量、同步功率增量及输入功率增量。
[0068]
在电路网络中,电感l、电阻r和电容c存在如下式(2)所示的电压、电流关系。其中:i
l
、i
r
分别为流过电感和电阻的电流,i
s
为电流源输出的电流。
[0069][0070]
由公式(1)
‑
(2)可知,转子动力学方程和rlc电路方程具有相同形式的数学表达式,这种数学形式上的一致性在一定程度上反映了两者在物理本质上存在着某些共同规律。因此,根据机电比拟原理,可将vsg的转子运动方程类比为机械网络,具体对应关系如表1所示。
[0071]
表1元件参数间的类比
[0072][0073]
根据表1中元件参数间的类比关系,可以直观地画出图3中vsg功频小信号模型对应的机械网络,如图4所示,并依据元件的串、并联关系求出反映vsg输出功率和角速度响应关系的机械导纳y
a
和y
b
。其中,y
a
为第一机械导纳y
a
=jω
s
s+dω
s
,y
b
为第二机械导纳
[0074]
基于图3中多vsg并网系统的拓扑结构,考虑电网阻抗的影响,以图4中的二端网络为基础,构建多台vsg并网系统的机械导纳模型,如图5所示。其中,电网阻抗的机械导纳y
g
(s)=k
g
/s,k
g
的计算方法与同步系数k
p
一致,k
g
=u
g
u
pcc
cosδ
g0
/x
g
,其中:u
g
为电网电压的初始值,x
g
为电网电抗,δ
g0
为电网电压和pcc点电压的初始相角差。
[0075]
步骤s2:推导出vsg输出角频率的传递函数矩阵;
[0076]
由图2单台vsg并网模式下的功频小信号模型可得出功率环的输出角频率,如式(3)所示。
[0077][0078]
由多vsg并网系统的机械导纳模型,根据kirchhoff定律,可求得pcc处频率满足以下关系:
[0079][0080]
将式(4)代入式(3),化简可得第m台vsg角频率的具体表达如式(5)所示。
[0081][0082]
其中:
[0083][0084][0085][0086]
由式(5)可知,多vsg并网系统中,并网vsg
m
的输出频率由3部分组成,其中r
m
(s)、h
m,t
(s)和s
m
(s)分别为vsg自身有功指令输入、与其它并网vsg的交互作用以及电网频率扰动产生的响应。
[0087]
步骤s3:基于频率的rga原理对vsg输出角频率的传递函数矩阵进行分析,确定vsg控制通道间交互影响的程度;
[0088]
将n个vsg的输出角频率表达式写成矩阵形式,如式(9)和式(10)所示。式(10)表明多vsg并网系统是一个多输入多输出(multiple
‑
input multiple
‑
output,mimo)系统。
[0089][0090][0091]
采用rga原理对所述传递函数矩阵进行分析,具体为:式中:表示hadamard乘积,即矩阵中的对应元素进行相乘;g(s)表示mimo控制系统的传递函数矩阵。当s=jω=0时,r
rga
[g(0)]表示mimo控制系统稳态时不同控制回路间的相对增益矩阵;当s=jω=j2πf时,r
rga
[g(s)]表示在不同频率下mimo控制系统控制回路间的动态相对增益矩阵。通过矩阵r
rga
[g(s)]可定量分析mimo控制系统不同控制回路间的交互影响,确定系统最易产生交互影响的频率范围。相对增益矩阵r
rga
[g(s)]中的对角元素λ
ii
表征系统vsg控制环路间的交互影响程度。
[0092]
当0<λ
ii
<1时,表示系统不同控制通道间存在正交互影响,其有利于抑制不同控制回路间的交互作用;当λ
ii
=1时表示控制通道间不存在交互影响;当λ
ii
>1时,表示系统不同控制通道间存在负交互影响。
[0093]
当λ
ii
∈[0.8 1.2]时,其表示控制通道间的交互影响较小,且λ
ii
距离1越近,交互影响越小;当λ
ii
∈[0.8 1.2]或λ
ii
∈[1.5∞]时,其表示控制系统交互影响较大,控制通道受耦合作用影响较严重。
[0094]
步骤s4:研究并网vsg台数、虚拟惯性、阻尼系数及电网阻抗变化时vsg控制通道间交互作用的变化规律,从而确定vsg易产生交互影响的频率范围。
[0095]
步骤s4
‑
1:设置待考察的频率范围[f1,f2],步长为δf,其中,可通过绘制有功功率指令输入扰动下vsg输出角频率响应传递函数的bode图,确定vsg控制通道间交互影响的频率考察范围。vsg的参数信息见表2。
[0096]
表2并网vsg参数
[0097][0098]
[0099]
步骤s4
‑
2:构建频率为f1时的系统传递函数矩阵g(s),具体过程请参见步骤s3。
[0100]
步骤s4
‑
3:改变频率f1为f1=f2+δf,记录此时的相对增益λ
ii
,重复上述步骤s4
‑
2,直至f2≤f1;
[0101]
步骤s4
‑
4:绘制频率在[f1,f2]范围内的λ
ii
,即可得到相对增益曲线,由此可确定vsg控制通道间产生交互影响的区间。
[0102]
步骤s4
‑
5:采用控制单一变量的方法,分别研究虚拟惯性、电网阻抗、并网vsg台数及阻尼系数变化时vsg控制通道间交互作用的变化规律。其中,虚拟惯性和电网阻抗变化时的相对增益曲线如图6和图7所示。
[0103]
由图6可知,在0hz<f<6hz频率范围内,当虚拟惯量j增大时,vsg控制通道间的负交互影响逐渐增强,但交互作用范围变窄,且负交互作用最严重的系统频率也逐渐降低。当频率大于6hz时,λ
11
≈1,此时vsg不同控制通道间不存在交互影响。上述分析表明虚拟惯量j对vsg控制通道间的交互影响较大,存在交互影响的频率范围为0hz<f<6hz。
[0104]
由图7可知,在0hz<f<2hz频率范围内,不同阻尼系数对相对增益λ
11
的影响较小,且频率越小,交互影响越弱。在2hz<f<7hz频率范围内,当阻尼系数d增大时,相对增益λ
11
的幅值逐渐降低,也即vsg不同控制通道间的负交互影响逐渐减弱,且负交互作用最严重的系统频率也逐渐降低。当频率f>7hz时,λ
11
≈1,表明vsg不同控制通道间不存在交互影响。
[0105]
本发明具有计算简单,仅根据rga矩阵对角元素值就可判断出控制回路间交互作用强弱的优点,从而确定出vsg易产生交互影响的频率区间,为解决当前高渗透率新能源并网工程应用中出现的控制通道间交互影响提供定量信息。本发明的基于rga定理的多vsg并网系统控制环路间的交互影响定量分析方法不仅适用于不同vsg,而且适用于采用下垂控制及其改进vsg控制策略的定量分析。
[0106]
与现有技术相比,本发明的有益效果是:
[0107]
本发明建立了多vsg并网系统的机械导纳模型,推导出各台vsg输出角频率的传递函数矩阵。基于频率的rga原理对vsg输出角频率的传递函数矩阵进行分析,进而确定vsg控制通道间的交互影响程度。研究了并网vsg台数、虚拟惯性系数、阻尼系数及电网阻抗变化时vsg不同控制通道间交互作用的变化规律,从而确定易产生交互影响的频率范围。本发明具有计算简单,仅根据rga矩阵对角元素值就可判断出控制回路间交互作用强弱的优点,从而确定出vsg易产生交互影响的频率区间,为解决当前高渗透率新能源并网工程应用中出现的控制通道间交互影响提供定量信息。
[0108]
可以理解的是,以上关于本发明的具体描述,仅用于说明本发明而并非受限于本发明实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1