马达系统及马达驱动方法与流程
1.本揭示内容关于一种马达系统及马达驱动方法,特别是一种透过判断反向电动势以计算出转子位置的技术。
背景技术:
2.随着科技进步,各种电子装置的运作频率随之升高,但运作频率的升高却导致电子装置于运作时的装置内部温度也相对提高,为了不让高温对电子装置的运作产生影响,甚至是毁损电子装置,风扇的存在对于电子装置运作的维持是不可或缺。
3.风扇系统于运作时,需根据马达的转子位置判断运作状态。虽然风扇系统内可配置位置传感器来侦测马达的转子,但此作法需要更高的成本及更大的安装空间。因此,需要一种适合应用于无感(sensorless)风扇系统的驱动方法。
技术实现要素:
4.本揭示内容是关于一种马达驱动方法,包含下列步骤:检测驱动电路中的第一开关及第二开关间的检测电压值,其中驱动电路电性连接于供电电源及马达装置,用以根据切换频率控制第一开关及第二开关,以提供驱动电流至马达装置;根据检测电压值判断驱动电流;在驱动电流小于一预定值时,关断第一开关及第二开关一段检测期间,其中检测期间的时间长度为固定值;在检测期间,检测马达装置的反向电动势,以计算反向电动势的归零时间;以及根据归零时间,调整切换频率。
5.在一实施例中,马达驱动方法还包含:在检测期间,检测马达装置的反向电动势,以取得多个检测电动势值;以及根据这些检测电动势值,计算反向电动势的归零时间。
6.在一实施例中,驱动电流在检测期间通过零点。
7.在一实施例中,计算反向电动势的归零时间的方法包含:根据这些检测电动势值,取得一变化特性线;以及根据变化特性线的一斜率,计算反向电动势的归零时间。
8.在一实施例中,驱动电路包含多个桥臂单元,第一开关及第二开关位于这些桥臂单元中的同一个。
9.在一实施例中,当检测第一开关及第二开关间的检测电压值时,第一开关及第二开关被关断。
10.在一实施例中,切换频率为脉冲宽度调变信号的频率,且检测期间的时间长度为脉冲宽度调变信号的周期的整数倍数。
11.在一实施例中,检测期间的时间长度为脉冲宽度调变信号的一个固定数目的周期长度。
12.在一实施例中,马达装置的电流相位及电压相位根据切换频率而变化。
13.在一实施例中,马达装置为一种三相马达,三相马达具有三个输入节点,第一开关及第二开关间的检测节点是连接于这些输入节点中的其中一个。
14.本揭示内容还关于一种马达系统,包含驱动电路、马达装置及控制电路。驱动电路
电性连接于供电电源,且至少包含第一开关及第二开关。驱动电路用以产生驱动电流。马达装置电性连接于驱动电路,用以接收驱动电流。控制电路电性连接于驱动电路,用以检测第一开关及第二开关间的检测电压值。当控制电路根据检测电压值判断驱动电流值小于预定值时,控制电路关断第一开关及第二开关一段检测期间,以检测马达装置的反向电动势,且计算反向电动势的归零时间。
15.在一实施例中,控制电路检测马达装置在检测期间的反向电动势时,是用以取得多个检测电动势值,且根据这些检测电动势值计算反向电动势的归零时间。
16.在一实施例中,驱动电流在检测期间通过零点。
17.在一实施例中,控制电路还用以根据这些检测电动势值,取得变化特性线,控制电路根据变化特性线的斜率,计算反向电动势的归零时间。
18.在一实施例中,驱动电路包含多个桥臂单元,第一开关及第二开关位于这些桥臂单元中的同一个,且控制电路根据切换频率控制第一开关及第二开关。
19.在一实施例中,当检测第一开关及第二开关间的检测电压值时,控制电路将第一开关及第二开关维持于关断状态。
20.在一实施例中,切换频率为脉冲宽度调变信号的频率,且检测期间的时间长度为脉冲宽度调变信号的周期的整数倍数。
21.在一实施例中,检测期间的时间长度为脉冲宽度调变信号的一个固定数目的周期长度。
22.在一实施例中,控制电路根据反向电动势的归零时间,调整切换频率。
23.在一实施例中,马达装置的电流相位及电压相位根据切换频率而变化。
24.本揭示内容利用驱动电流过零点的一段期间,检测反向电动势一段固定时间(即,检测期间),进而推测出反向电动势过零点的归零时间。据此,将可避免检测时间过长、导致马达系统的不稳定或异常的问题。
附图说明
25.图1为根据本揭示内容的部分实施例的马达系统的示意图;
26.图2a为根据本揭示内容的部分实施例的各种信号波形的示意图;
27.图2b为根据本揭示内容的部分实施例的信号波形的局部示意图;
28.图3为根据本揭示内容的部分实施例的马达驱动方法的流程图。
29.【符号说明】
30.100:马达系统
31.110:驱动电路
32.120:马达装置
33.130:控制电路
34.b1-b3:桥臂单元
35.n1-n3:检测节点
36.nu:输入节点
37.nv:输入节点
38.nw:输入节点
39.vb:供应电源
40.q1:第一开关
41.q2:第二开关
42.vp:驱动电压
43.ip:驱动电流
44.ve:反向电动势
45.td:检测期间
46.d1:第一距离
47.d2:第二距离
48.a:检测电动势值
49.b:检测电动势值
50.s301-s307:步骤
具体实施方式
51.以下将以附图揭露本发明的多个实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本发明。也就是说,在本发明部分实施方式中,这些实务上的细节是非必要的。此外,为简化附图起见,一些已知惯用的结构与元件在附图中将以简单示意的方式绘示。
52.于本文中,当一元件被称为“连接”或“耦接”时,可指“电性连接”或“电性耦接”。“连接”或“耦接”亦可用以表示二或多个元件间相互搭配操作或互动。此外,虽然本文中使用“第一”、“第二”、
…
等用语描述不同元件,该用语仅是用以区别以相同技术用语描述的元件或操作。除非上下文清楚指明,否则该用语并非特别指称或暗示次序或顺位,亦非用以限定本发明。
53.图1为根据本揭示内容的部分实施例的马达系统100示意图。马达系统100包含驱动电路110、马达装置120及控制电路130。驱动电路110电性连接于供电电源vb及马达装置120,包含多个开关元件。在一实施例中,驱动电路110根据控制信号uh、ul、wh、wl、vh、vl分别控制开关元件的导通与关断,以输出驱动电流。
54.马达装置120电性连接于驱动电路110的输出端,以接收驱动电流。在一实施例中,马达装置120用以带动风扇100的扇叶(图中未示)旋转。在部分实施例中,马达装置120为一种三相马达,具有三个输入节点nu、nv、nw。在部分实施例中,马达系统100应用于一种风扇系统。意即,马达装置120用以带动风扇的扇叶旋转,但本揭示内容并不以此为限,本揭示内容亦可应用于其他类型的装置。
55.驱动电路110则包含三个桥臂单元b1~b3。每个桥臂单元b1~b3分别包含第一开关q1及第二开关q2,且分别电性连接于不同的输入节点nu、nv、nw。每个桥臂单元b1~b3的第一开关q1及第二开关q2是根据控制信号uh、ul、wh、wl、vh、vl被导通或关断,提供三相的驱动电流至马达装置120。由于本领域人士理解三相马达的运作方式,故在此不另赘述。
56.控制电路130电性连接于驱动电路110中的任一个桥臂单元b1~b3,用以提供控制信号uh、ul、wh、wl、vh、vl,且还用以检测第一开关q1及第二开关q2之间的检测节点的检测电压值。如图1所示,控制电路130能连接于检测节点n1、n2、n3中的任一者。在一实施例中,
控制电路130是根据转速信号产生控制信号uh、ul、wh、wl、vh、vl。转速信号为一种脉冲宽度调变信号,其频率对应于控制信号uh、ul、wh、wl、vh、vlm,用以控制第一开关q1及第二开关q2的切换频率。
57.当控制电路130能根据检测电压值,判断驱动电流的电流信息,例如电流大小、电流方向等。当控制电路130判断驱动电流小于预定值时,控制电路130将会确保其连接的第一开关q1及第二开关q2维持在关断状态,且维持的时间为固定值。为便于说明,在此将该时间称为“检测期间”。在检测期间,控制电路130将检测马达装置120的反向电动势(back emf)的大小及趋势,进而计算出反向电动势归零的时间。
58.在一实施例中,前述的“预定值”为接近零点的数值。换言之,控制电路130是于驱动电流过零点的期间,检测反向电动势。控制电路130则可在驱动电流趋近于零时,开始计时“检测期间”。在其他实施例中,控制电路130亦可在判断出驱动电流为零时,开始计时“检测期间”(即,驱动电流为零的时间点,为检测期间的起始点)。
59.具体而言,在检测期间,控制电路130将检测马达装置120在不同时间点的反向电动势,以取得多个检测电动势值。根据这些检测电动势值,将能推算出反向电动势的变化趋势,以估算出反向电动势的归零时间。
60.在其他实施例中,控制电路130中储存有马达装置120的参数模型,使得控制电路130于检测期间可仅须检测一次反向电动势,即可推算出反向电动势的归零时间。此外,控制电路130亦可不利用参数模型,而是透过检测到的反向电动势来调整转速或驱动马达装置120的驱动电压,以推算反向电动势的归零时间。
61.图2a是根据本揭示内容的部分实施例的信号波形图,包含马达装置的驱动电压vp、驱动电流ip及反向电动势ve。图2a的横轴代表时间、纵轴则代表电流、电压、电动势的变化趋势。如图所示,在驱动电流ip过零点的期间(即,检测期间td),控制电路130检测马达装置120的反向电动势ve,以取得至少两个检测电动势值。这些检测电动势值可形成一条变化特性线。根据变化特性线的斜率,或者将检测电动势值a、b的座标配合三角函数,即可推算出变化特性线与零点交会的时间。
62.图2b为图2a的局部放大图。如图所示,控制电路130检测马达装置120的反向电动势ve,以取得两个检测电动势值a、b。由于驱动电流ip的曲线会接近于反向电动势ve的曲线,因此当驱动电流ip趋近于零时(即,检测期间td),反向电动势ve亦将在零点附近。据此,这些检测电动势值a、b相连形成的变化特性线l将能视为等同于反向电动势ve的曲线。控制电路130能根据检测电动势值a与同一时间中驱动电流ip的值,取得第一距离d1(在图2b中,检测电动势值a对应的驱动电流ip为零,所以第一距离d1就是检测电动势值a座标值)。接着,透过第一距离d1及变化特性线的斜率,将能推算出第二距离d2。第二距离d2即为“反向电动势ve归零的时间”至“检测电动势值a被检测出的时间点”间的时间差距。
63.控制电路130用以根据反向电动势ve的归零时间,并搭配转速信号,计算马达装置120的转子位置。控制电路130可据以确认马达系统100的运转状态是否符合预期。由于本领域人士能了解根据反向电动势计算转子位置的方法,故在此不另赘述。
64.具体而言,为了让马达装置120运作于理想的效率、避免多余的能量耗损,马达装置120的驱动电压vp及驱动电流ip的相位应互相对应(如:信号波形的相位重合)。因此,在一实施例中,当控制电路130推算出反向电动势的归零时间,且推算出转子位置后,控制电
路130将据以调整转速信号的频率(即,改变控制信号uh、ul、wh、wl、vh、vl的切换频率),以改变驱动电压vp的电压相位及驱动电流ip的电流相位,使二者的相位能相互靠近。
65.在部分实施例中,当控制电路130检测第一开关q1及第二开关q2间的检测电压值时,控制电路130将第一开关q1及第二开关q2维持于关断状态,避免桥臂单元b1~b3因短路而产生异常。换言之,控制电路130检测检测电压值的时间是在“第一开关q1及第二开关q2皆关断”的时刻。
66.本揭示内容是利用驱动电流过零点(或趋近于零)的一段期间,检测反向电动势一段固定时间(即,检测期间)。透过反向电动势在检测期间中的多个检测电动势值,推测出其过零点的归零时间,据此,即可避免检测时间过长、导致马达系统100的不稳定或异常的问题。
67.在部分实施例中,控制信号uh、ul、wh、wl、vh、vl是根据转速信号而产生,且亦为一种脉冲宽度调变信号。检测期间的时间长度为脉冲宽度调变信号的一个固定数目的周期长度(如:周期的整数倍数)。举例而言,检测期间的时间长度可为脉冲宽度调变信号的2~5个周期长度。在一实施例中,检测期间的时间长度可为脉冲宽度调变信号的3个周期长度。检测期间的时间长度为一固定值,但并不以前述2~5个周期长度为限。在实施上可根据需求调整。
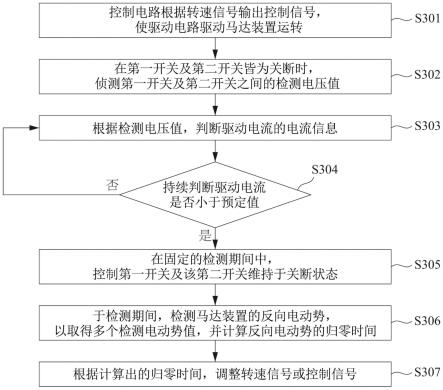
68.图3为本揭示内容的部分实施例的马达驱动方法流程图。在步骤s301中,控制电路130根据转速信号输出控制信号uh、ul、wh、wl、vh、vl至驱动电路110,使驱动电路110输出驱动电流至马达装置120。马达装置120根据驱动电流运转,并带动风扇的扇叶。
69.在步骤s302中,在马达装置120运转时,控制电路130将侦测其中一个桥臂单元b1~b3的第一开关q1及第二开关q2的状态。在第一开关q1及第二开关q2皆为关断时,控制电路130侦测第一开关q1及第二开关q2之间的检测电压值。在一实施例中,控制电路130将定期地反复进行步骤s302,以记录多笔检测电压值。
70.在步骤s303中,控制电路130根据检测电压值,判断驱动电流的电流信息(如:电流大小、电流流向)。在一实施例中,控制电路130是检测第一开关q1及第二开关q2皆为关断时,驱动电路110输出的驱动电流,并记录为电流曲线(如图2a所示的驱动电流ip)。
71.在步骤s304中,控制电路130持续判断驱动电流是否小于预定值(如:是否为零)。若驱动电流未小于预定值,则持续进行步骤s303。在部分实施例中,驱动电流会在检测期间内通过零点。
72.在步骤s305中,在驱动电流小于预定值时,控制电路130将控制/改变控制信号uh、ul、wh、wl、vh、vl,以在固定的检测期间中,将第一开关及该第二开关维持于关断状态。
73.在步骤s306中,控制电路130于检测期间,检测马达装置120的反向电动势,以取得多个检测电动势值,并计算反向电动势的归零时间。在一实施例中,控制电路130将多个检测电动势值所形成的变化特性线作为反向电动势的变化趋势,且根据其斜率计算出归零的时间。
74.在步骤s307中,控制电路130根据计算出的归零时间,判断马达装置120的转子位置。接着,根据转子位置调整转速信号或控制信号。控制信号uh、ul、wh、wl、vh、vl的切换频率将随之改变,使得马达装置120的电流相位及电压相位能朝彼此靠近,以改善运作效率。
75.在一实施例中,马达系统100于每个周期中皆会执行前述马达驱动方法,以使马达
系统100能具有良好的效能。控制电路130检测反向电动势的次数可由使用者任意调整,但检测期间td为固定值。由于本揭示内容是根据多个检测电动势值的变化特性线推算出归零时间,故控制电路130无须实际侦测出反向电动势归零的那个时间点。据此,可避免第一开关q1及第二开关q2关闭时间过久而产生运作的异常。
76.前述各实施例中的各项元件、方法步骤或技术特征,是可相互结合,而不以本揭示内容中的文字描述顺序或附图呈现顺序为限。
77.虽然本揭示内容已以实施方式揭露如上,然其并非用以限定本揭示内容,任何熟悉此技艺者,在不脱离本揭示内容的精神和范围内,当可作各种更动与润饰,因此本揭示内容的保护范围当视所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1