动力装置的制作方法
1.本发明涉及一种动力装置。
背景技术:
2.动力装置作为独立动力单元,用于连接至执行设备上以驱动执行设备工作或运行。作为一个动力输出单元,动力装置包括驱动部件、能源部件、控制部件。而作为一个多个部件的结合体,动力装置的体积、重量、散热等均存在较大弊端。如何提供一种输出动力大且结构紧凑的动力装置是目前亟待解决的技术问题。
技术实现要素:
3.为解决现有技术的不足,本发明的目的在于提供一种输出动力大且结构紧凑的动力装置。
4.为了实现上述目标,本发明采用如下的技术方案:一种动力装置,用于连接园林或户外动力执行设备,其包括:壳体,形成有容纳空间;马达,至少部分设置在容纳空间内;控制组件,用于控制马达;马达的最大输出功率p大于等于1500w且小于等于5500w,动力装置的质量m1大于等于8kg且小于等于14.5kg,最大输出功率p与质量m1的比值大于等于103.5w/kg且小于等于687.5w/kg。
5.进一步地,最大输出功率p与质量m1的比值大于等于120w/kg且小于等于500w/kg。
6.进一步地,动力装置的质量m1大于等于10kg且小于等于12kg。
7.进一步地,马达的最大输出功率p大于等于2000w且小于等于4000w。
8.进一步地,设置有马达轴,马达轴连接切割附件并可驱动切割附件转动;切割附件围绕马达轴转动并具有转动半径r,转动半径r大于等于200mm且小于等于325mm ,马达的最大输出功率p与转动半径r的乘积大于等于300kw.mm且小于等于1787.5kw.mm。
9.进一步地,电源组件的重量m2大于等于1.3kg且小于等于8kg。
10.进一步地,动力装置连接电源组件后的重量大于等于9.3kg且小于等于22.5kg。
11.一种动力装置系统,包括:动力装置;执行设备,可供动力装置连接;动力装置包括:壳体,形成有容纳空间;马达,设置在容纳空间内;控制组件,用于控制马达;马达的最大输出功率p大于等于1500w小于等于5500w,动力装置的质量m1大于等于8kg且小于等于14.5kg,最大输出功率p与质量m1的比值大于等于103.5w/kg且小于等于687.5w/kg。
12.进一步地,执行设备具有质量m3,动力装置的质量m1与执行设备的质量m3的比值大于等于0.25且小于等于0.46。
13.进一步地,执行设备具有质量m3,动力装置的质量m1与执行设备的质量m3的比值大于等于0.3且小于等于0.4。
14.本发明的有益之处在于:通过将动力装置的最大输出功率与质量的比值限定在一个预设范围内,从而实现动力装置能输出大功率动力且自身结构紧凑。
附图说明
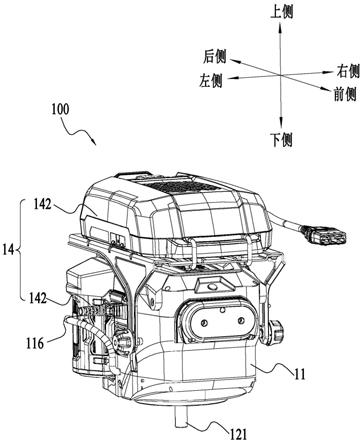
15.图1是第一实施例中的动力装置的立体图;图2是图1中的动力装置安装至执行设备上的立体图;图3是图1中的动力装置与第二类电源分离的分解示意图;图4是图1中的动力装置的爆炸图;图5是图1中的动力装置的另一视角的爆炸图;图6是图4中的动力装置的a处的局部放大图;图7是图1中的动力装置的剖面图;图8是图1中的动力装置的另一视角的剖视图;图9是图1中的动力装置去除第二类电源后固定件处于解锁位置的立体图;图10是第二实施例中的动力装置的立体图;图11是图10中的动力装置的另一视角的立体图;图12是图11中的动力装置的去除第二类电源的立体图;图13是图12中的动力装置的保护罩处于打开状态的立体图;图14是图13中的动力装置的保护罩分解后的立体示意图;图15是图10中的动力装置去除第二类电源的俯视图;图16是图10中的动力装置的b处的局部放大图;图17是图10中的动力装置的第三开关的立体示意图;图18是图10中的动力装置的马达的一种驱动连接方式的示意图;图19是图10中的动力装置的剖视图;图20是图19中的动力装置的c处的局部放大图;图21是图10中的动力装置安装至执行设备上的立体图。
具体实施方式
16.图1至图4示出了一种能够输出驱动力的动力装置100。其包括壳体11、马达12、控制组件13和电源组件14等。其中,壳体11形成有容纳空间113,其用于容纳马达12和至少部分的控制组件13。壳体11还形成有可供电源组件14连接的连接部。其中,电源组件14提供能源以使得马达12转动,控制组件13用于控制马达12和电源组件14,使得马达12在多个预设的动力模式内切换。动力装置100能连接至割草机、扫雪机等执行设备15上,并能驱动执行设备15运行。具体而言,动力装置100具备了动力输出、能源集成、控制集成、散热集成等功能,割草机、扫雪机等执行设备15可以作为一个机架或支撑结构,并能在动力装置100的驱动下,供用户操作。事实上,执行设备15仅需具备用于连接动力装置100的机架、可被驱动的附件以及可供用户操作的操作部即可。以下就动力装置100的各个模块做具体介绍。
17.作为一种实现方式,马达12包括一个输出端121,用于驱动附件运行。动力装置100在工作过程中,马达12高速运行会产生较多的热量。而动力装置100作为一种动力、控制等的集成,其壳体11内的空间有限,从而使得动力装置100在输出较高功率时,容纳空间113内会产生较多热量。作为一种实现方式,壳体11设置有气流入口111和气流出口112。马达12具体可以设置为电机,马达12上设置有第一风扇122,当马达12运行时,第一风扇122高速转动会在容纳空间113内形成负压,从而产生从气流入口111进入至容纳空间113中、流经控制组
件13和马达12、并从气流出口112流出的散热风路。作为一种实现方式,控制组件13包括电路板131和散热片132等零部件,散热片132与电路板131连接并用于给电路板131辅助散热。动力装置100的容纳空间113内还设置有第二风扇117,第二风扇117设置在散热风路的流通路径上,其能被单独驱动并产生散热风。在本实施方式中,第一风扇122具体为离心风扇,其能产生具有一个预设方向的散热气流。为了清楚的说明本发明的技术方案,还定义了如图1所示的前侧、后侧、左侧、右侧、上侧和下侧。作为一种可选的实施方式,气流出口112包括第一出风口112a和第二出风口112b。其中,第一出风口112a设置在动力装置100的左侧,第二出风口112b设置在动力装置100的右侧。动力装置100包括第一散热模式和第二散热模式。当动力装置100处于第一散热模式时,第一风扇122和第二风扇117均被开启,散热气流从气流入口111进入至容纳空间113中,在流经控制组件13和马达12之后,分别从第一出风口112a和第二出风口112b流出。当动力装置100处于第二散热模式时,第一风扇122开启,第二风扇117关闭,散热气流从气流入口111和第一出风口112a流入至容纳空间113中,并在流经控制组件13和马达12之后,从第二出风口112b流出。在本实施方式中,第一风扇122设置为离心风扇,当第一风扇122启动后,其能产生从左侧向右侧流动的散热气流,从而使得动力装置100处于第二散热模式时,原来的第一出风口112a作为辅助进风口与气流入口111共同进风,并从第二出风口112b排出散热风。
18.作为一种实现方式,控制组件13能控制动力装置100在第一散热模式和第二散热模式之间切换。动力装置100包括第一功率区间和第二功率区间,并在第一功率区间和第二功率区间之间设置了一个临界值,其中第一功率区间值小于第二功率区间值。这里需要解释的是,第一功率区间的任意值均小于第二功率区间的任意值。当动力装置100的输出功率大于等于临界值而处于第二功率区间时,动力装置100能切换至第一散热模式。当动力装置100的输出功率处于第一功率区间且小于临界值时,动力装置100处于第二散热模式。当动力装置100输出的功率在第一功率区间范围内时,马达12和控制组件13工作过程中释放出的热量在一个预设的范围内,第一风扇122单独工作即能有效的将容纳空间113内的热量送出。当动力装置100的输出功率处于大于等于临界值时,马达12和控制组件13工作过程中释放的热量超出了前述的预设值,第一风扇122单独工作不足以将容纳空间113的热量全部排出,长期工作会导致马达12或控制组件13损坏,此时需要第二马达12启动,与第一马达12共同工作以使得容纳空间113内的热量被有效的排出。从而使得动力装置100能长时期保持高功率输出的工作状态,且不会因为散热问题影响使用寿命。
19.可以理解的,为了提高动力装置100的散热灵敏度,还可以在容纳空间113内设置有温度传感器(图未示出),温度传感器能够感知容纳空间113内、马达12和控制组件13附近的温度,并根据实时温度输出电信号至控制组件13,以控制动力装置100在第一散热模式和第二散热模式之间切换。即当温度小于预设值时,动力装置100处于第一散热模式,当温度大于等于一个预设值时,动力装置100处于第二散热模式。在本实施方式中,第一风扇122具有第一功率p1,第二风扇117具有第二功率p2,第一功率p1与第二功率p2的比值大于等于1且小于等于10。通过设置第一风扇122与第二风扇117具有较大功率比,从而使得动力装置100在正常工作时仅通过第一风扇122进行散热,仅在容纳空间内113内的温度过高时,才启动第二风扇117,从而避免第二风扇117消耗了过多的能量,并能保证第一风扇122能满足基本的散热需求。
20.如图2至图7所示,作为一种实现方式,气流入口111和气流出口112均设置在壳体11的上侧位置并远离马达12的输出端121。这里以割草机为例,马达12的输出端121在驱动刀片转动进行割草作业时,会产生较多的碎屑和灰尘,而这些碎屑和灰尘大部分聚集在动力装置100的下侧位置,通过将气流入口111和气流出口112设置在远离马达12的输出端121的位置,可以使得气流入口111和气流出口112处于一个较佳的环境内以远离碎屑和灰尘,从而使得容纳空间113内的散热气流在流经控制组件13和马达12时,能保持较干净的状态,避免污染控制组件13或马达12,从而能有有效的延长动力装置100的使用寿命。进一步而言,气流入口111处还设置有空腔体,空腔体设置有底板和通路,底板自上而下倾斜设置,其中散热气流在由气流入口111进入至空腔体时,需要经过底板后再进入至通路中,并最终进入至容纳空间113内。在此过程中,散热气流中的粉尘或颗粒物在经过底板时,在重力的作用下堆积在底板上,从而能避免进入至容纳空间113中。空腔体还具备存储功能,当碎屑堆积较多时,可将空腔体中的碎屑集中清理。可以理解,气流入口111处还可以设置防尘罩、海绵等防尘装置,以增加散热气流的清洁度,这里不再赘述。
21.如图1、图7至图9所示,作为一种实现方式,电源组件14包括第一类电源141和第二类电源142。其中,第一类电源141可拆卸的连接至动力装置100的壳体11上并位于壳体11的侧面。第二类电源142装配至动力装置100的上侧。具体而言,壳体11的侧面设置有用于安装第一类电源141的连接部,连接部包括沿上下方向延伸的连接面。在本实施方式中,连接面包括第一连接面102和第二连接面103。第一连接面102和第二连接面103相交,在一个沿前后方向延伸的第一平面101方向上,第一连接面102和第二连接面103还基本关于第一平面101对称设置。此外,第一连接面102与第一平面101倾斜相交,第二连接面103与第一平面101倾斜相交。第一连接面102与第二连接面103形成有与马达12相交的夹持区,马达12至少部分位于该夹持区内。在本实施方式中,控制组件13包括第一控制板133和第二控制板134。其中,第一控制板133基本在第二平面104内延伸,第二控制板134基本在第三平面105内延伸。第二平面104与第一平面101相交,第三平面105与第一平面相交。第二平面104和第三平面105关于第一平面101对称设置。事实上,第一控制板133和第二控制板134相交并呈“v”字型。通过将第一控制板133和第二控制板134 设置成以上形式,可以充分利用壳体11夹角的空间,并从整体上减小动力装置100的体积。
22.壳体11还设置有第一类接口(图未示出),第一类接口能连接第一类电源141。动力装置100整体上呈立方体形状,通过将连接面设置在与第一平面101倾斜相交的位置,可以减小立方体的体积,从而节约空间。事实上,通过设置将第一连接面102和第二连接面103同时与第一平面101倾斜相交,可以充分削减动力装置100的凸棱部所占据的空间,而第一连接面102和第二连接面又设置为平面,从而提高第一类电源141安装至动力装置100上的可靠性和稳定性。第一类电源141设置为可拆卸的电池包。事实上,连接面可以设置有多个,从而可以连接更多体积较小的第一类电源141。可以理解,第一类接口可以设置在连接部的不同位置,从而适应不同电池包的连接。第一类电源141并不限于统一的尺寸,任何能输出有效电流且具备有效接口的电池包均能被安装至连接面上。在一个垂直于前后方向的平面内,第一类电源141与马达12沿第一平面101方向在该平面内的投影至少部分重合。
23.动力装置100上还设置有用于固定第一类电源141的固定件16。作为一种实现方式,固定件16采用翻盖形式以罩住至少部分的第一类电源141。具体的,固定件16在壳体11
上被设置为在远离第一类电源141的位置围绕一转动轴转动,其包括罩住第一类电源141的锁定状态和远离第一类电源141的解锁状态。当固定件16处于锁定状态时。第一类电源141能被至少部分罩住并能被有效固定在壳体11上。可以理解的,通过这样的设置方式,电池包大部分裸露在外界,从而能使得电池包能较好的散热。
24.第二类电源142被设置为一体式电源结构,其能被安装在动力装置100的上侧,并通过一组滑轨142a实现与动力装置100的连接。具体而言,第二类电源142可以从上下方向安装至动力装置100或者脱离动力装置100,也可以从左右方向或前后方向安装至动力装置100或脱离动力装置100,还可以围绕一转动轴转动从而安装至动力装置100或脱离动力装置100。动力装置100还设置有第二类接口116,第二类接口116能连接第二类电源142,以实现对动力装置100的供电。第一类电源141和第二类电源142相互垂直设置,从而能最大限度的利用壳体11的外部空间。具体而言,第一类电源141与第二类电源142可以采用并联的连接方式,其供电模式多样化。可以采用第一类电源141与第二类电源142同步供电,或者当第一类电源141耗尽时,第二类电源142单独供电;或者第二类电源142耗尽时,第一类电源141单独供电;或者对第一类电源141进行实时更换,从而实现对动力装置100的供电。可以理解,第一类接口由于设置在不同位置且能适应不同型号的电源,其适配性极好,能够根据工况所限定的环境插接市场上绝大部分型号的电池包,从而增加动力装置100的续航能力,保证动力装置100持续工作。
25.如图4至图5所示,壳体11包括第一壳体114和第二壳体115。其中,第一壳体114设置为动力装置100的基座,第二壳体115设置为用于容纳马达12及控制组件13的主体部。第二壳体115设置在第一壳体114的上侧,第一壳体114还至少部分包覆第二壳体115。这里,上述第一连接面102和第二连接面103实际上是设置在第二壳体115上的。第一壳体114采用第一类材料制成,第二壳体115采用第二类材料制成。在本实施方式中,控制组件13还被设置为至少部分与第一壳体114连接,并能通过第一壳体114散热。具体而言,第一材料的导热系数大于第二材料的导热系数。当控制组件13设置为与第一壳体114连接时,控制组件13工作过程中产生的热量能够至少部分的通过热传导的形式传递至第一壳体114上,并通过第一壳体114散出。这里需要解释的是,控制组件13与第一壳体114的连接并不限于传统意义上的固定连接、可拆卸连接或其他连接方式,控制组件13与第一壳体114接触,或者控制组件13与第一壳体114之间的距离小于一个预设值,且能实现控制组件13上的热量辐射至第一壳体114上,并能通过第一壳体114散出,均可视为上述的控制组件13与第一壳体114连接。第一壳体114的导热系数设置为大于等于80w/(m*k),其能以较佳的状态导出来自于控制组件13的热量。
26.作为一种实现方式,第一类材料的抗拉强度大于第二类材料的抗压强度。具体而言,第一类材料的抗拉强度设置为大于等于225mpa且小于等于350mpa,第二类材料的抗拉强度设置为大于等于56mpa且小于等于215mpa。这里,动力装置100的外表面的表面积为s1,第一壳体114装配至动力装置后,第一壳体114的外表面的表面积为s2,动力装置100整机的外表面积s1与第一壳体114的外表面积s2的比值大于等于1且小于等于2。进一步而言,动力装置100整机的外表面积s1与第一壳体114的外表面积s2的比值大于等于1.5且小于等于2。通过这样的设置,一方面能够节约金属用料,另一方面还能使得动力装置100具备足够的强度,并在外观上具备金属质感。事实上,第一壳体114沿前后方向上贯穿整个动力装置100,
同时还沿左右方向贯穿整个动力装置100,从而使得整个动力装置100的底座均被第一壳体114包覆,并至少部分的沿上下方向延伸,从而使得动力装置100的整个底座的强度得到保证。
27.第一壳体114采用金属材料制成,第二壳体115采用塑料制成。通过设置两种材料的结合,一方面能够保证基座的强度,另一方面能够减小整个动力装置100的重量,从而优化动力装置100的配置。此外,第一壳体114具有第一质量m1,第二壳体115具有第二质量m2,第一质量与第二质量的比值大于等于3且小于等于5。
28.在本实施方式中,动力装置100的控制组件13还被装配为一个整体,从而安装至基座上。具体而言,在动力装置100被装配之前,电路板131、散热片132、主板、电源管理板等已经被安装成一个整体,当需要装配时,控制组件13作为一个整体被安装至容纳空间113内。从而,当控制组件13出现故障时,其能被整个拆卸下来以进行修理,从而优化了动力装置100的可维修性。
29.图10示出了示出了第二实施例的动力装置200。如图10和图19所示,在本实施例中,该动力装置200可以具有与第一实施例结构相同的马达22、控制组件23和电源组件24。第一实施例中与本实施例中相适应的部分均可以应用到本实施例中,以下仅介绍本实施例与第一实施例的区别部分。
30.如图11至图13所示,在本实施例中,壳体21包括第一壳体211和第二壳体212。电源组件24包括第一类电源241和第二类电源242。其中,第一类电源241还设置保护罩25。保护罩25被设置为能围绕一转轴212b转动。具体而言,转轴212b设置在第二壳体212上,并沿第一直线201延伸。第二壳体212还形成或连接有用于包覆至少部分的第一类电源241的延伸部212a。延伸部212a上连接或形成转轴212b。为了清楚的说明本发明的技术方案,还定义了如图11所示的前侧、后侧、左侧、右侧、上侧和下侧。其中,第一壳体211至少部分的包覆了第一类电源241下侧和后侧。而保护罩25至少部分的包覆了第一类电源241的上侧和后侧。即保护罩25及延伸部212a构成的整体包覆了第一类电源241的后侧。事实上,第一壳体211也可以不形成延伸部212a,即保护罩25自下而上延伸,并能包覆第一类电源241的整个后侧和上侧。关于第一壳体211和保护罩25的分配方式,此处不再赘述,只要能实现至少部分的包覆第一类电源241的后侧即可。在本实施方式中,保护罩25包括第一罩体251和第二罩体252。其中,第一罩体251采用第一材料制成,第二罩体252采用第二材料制成,第一罩体251与第二罩体252固定连接。具体的,第一罩体251采用橡胶件或塑料件,第二罩体252采用金属件,其优选不锈钢或铝合金。第一罩体251和第二罩体252采用螺钉连接或铆钉连接,并能被连接成一个整体,即二者在形状和外形上基本一致,从而能有效契合。通过设置采用两种材料组合形成的保护罩25,一方面能够增加保护罩25的强度,另一方面通过设置橡胶件或塑料件等材料,可以增加动力装置200跌落或碰撞时,保护罩25与接触面的缓冲。第一壳体211上还形成有用于连接保护罩25的连接组件219。具体而言,连接组件219可以为能与保护罩25构成卡扣连接的卡接组件219,还可以是能吸引第二罩体252的磁性件。围绕连接组件219还形成或连接有缓冲部,从而避免保护罩25连接至连接组件219时,产生较大噪音。
31.在本实施方式中,动力装置200实际上包括了三部分壳体,即第一壳体211、第二壳体212和保护罩25。动力装置200通过上述设计方式实现了动力装置200的多段式设置,即基于第一壳体211的底座、第二壳体212的主体部及保护罩25,从而使得动力装置200的各个部
分的结构得以最优化,即满足了底座对于强度的要求,主体部对于形状的要求,保护罩25对于位置和连接方式等的要求。此外,也便于动力装置200的生产和装配的模块化,简化了生产和装配方式。
32.如图14所示,在一个沿上下方向延伸的直线方向上,动力装置200沿该直线方向上在垂直于该直线的平面内的投影基本呈多边形,并基本关于一个对称平面或对称直线对称。这里需要解释的是,动力装置200在上述平面内的投影可以是规则形状,也可以是趋于规则形状的不规则形状,其一般是满足装配需求。而通过上述设置,可以使得动力装置200配重均匀,便于生产及装配。
33.如图11所示,在本实施方式中,动力装置200还包括用于控制电源组件24上电或断电的第一开关26。围绕第一开关26还设置有用于显示电源组件24当前状态的指示灯261。可以理解,指示灯261还可以相对第一开关26设置在其他位置,包括关于第一开关26对称设置,设置在第一开关26的一侧或远离第一开关26设置,只要能满足第一开关26被触发以给电源组件24上电时,指示灯261能位于用户的可视范围内即可。事实上,第一开关26也被设置在第一壳体211上可被触发的外表面上,且位于可视范围内。这里需要解释的是,指示灯261可以作为第一开关26的一部分,也可以视作与第一开关26分离的两个零件。只要能实现第一开关26被触发时,指示灯261能限制电源组件24的状态即可。
34.具体而言,指示灯261能根据电源组件24当前状态显示不同颜色或形状的灯光。作为一种实现方式,指示灯261围绕第一开关26分布,并呈圆环状,从而当第一开关26被触发时,围绕第一开关26分布的指示灯261能清楚的反映当前的电源组件24的状态。实践中,电源组件24一般包括“过温”、“低压”、“过载”、“正常”等工作状态。而上述状态分别需要用户通过不同的操作以响应当前的电源组件24,避免电源组件24损坏。故而,通过设置指示灯261,能及时提醒用户应对当前电源组件24的状态,避免电源组件24损坏或电路损坏而影响动力装置200的使用寿命。更具体的,指示灯261与电源组件24构成电连接,第一开关26也与电源组件24构成电连接。指示灯261与电源组件24之间还连接有电源管理板(图未示出),即电源管理板同时与指示灯261和电源组件24构成电连接。此外,电源管理板还与第一开关26构成电连接。当第一开关26被触发,电源组件24上电时,电源管理板收集当前电源组件24的状态信息,并将该状态信息传递至指示灯261,指示灯261根据该状态信息反映出不同颜色或不同形状的灯光。在本实施方式中,指示灯261还被设置为当电源组件24处于不同状态时,其能显示不同颜色的亮光,还能以不同频率闪烁。具体而言,当电源组件24处于“过温”状态时,指示灯261显示黄灯并常亮;当电源组件24处于“低压”状态时,指示灯261显示红色并闪烁;当电源组件24处于“过载”状态时,指示灯261显示黄灯并闪烁;当电源组件24处于“正常”状态时,指示灯261显示绿灯并常亮。
35.在本实施方式中,动力装置200还包括第二开关27,第二开关27被设置为用于调节马达22的转速。第二开关27也被设置在壳体21上可被触发的外表面上。具体的,第二开关27设置在第二壳体212的上表面,并设置为旋钮状,其可被旋转以调节马达22的转速。
36.如图10、图16及图17所示,动力装置200还设置有第三开关28,第三开关28被设置为用于启动马达22。第三开关28包括可被操作的操作组件281和可被触发的触发件282。其中,操作组件281可被用户操作以触发触发件282。具体的,操作组件281包括操作件281a、转动件281b,触发件282包括触发部282a和弹性部282b。其中,操作件281a连接转动件281b,并
能控制转动件281b围绕一转动轴转动。转动件281b具有触发或靠近触发件282的第一位置和远离触发件282的第二位置。当转动件281b位于第一位置时,触发部282a不被触发,马达22处于关机状态。当转动件281b位于第二位置时,触发部282a被触发,此时马达22通电并开始运转。具体而言,触发部282a设置为霍尔元件,转动件281b上设置有与霍尔元件配合的磁性件。当磁性件与霍尔元件接触时,马达22的供电电路被接通,此时马达22开始运转。可以理解,触发部282a还可以设置其他形式的开关,只要在其被触发时,马达22的供电电路被接通即可,此处不再赘述。更具体的,弹性件一端连接转动件281b,另一端连接靠近触发部282a的连接端,并在转动件281b和操作件281a之间具备预紧力。这里,操作件281a在被操作以使得转动件281b由第一位置运动至第二位置时,需要克服弹性件的弹性力,而当操作件281a被释放时,转动件281b在弹性件的弹性力作用下复位至第一位置。可以理解,操作件281a可以被设置为直接由线缆连接至转动件281b,从而便于远程操作;也可以被设置为由电控单元控制运动,此处不再赘述,只要能延伸至预设位置并可供操作即可。
37.如图18所示,在本实施方式中,马达22包括马达轴221,其包括能输出多组动力的第一驱动部222和第二驱动部223。即当动力装置200被连接至执行设备30时,其能输出多组动力,从而满足执行设备30对不同动力的需求。这里以割草机为例,手推式割草机一般需要满足割草功能和自走功能,而割草功能和自走功能分属于两种不同的功能,其需要两种不同形式的动力驱动。第一驱动部222可以连接第一传动部224以输出第一传动力,第二驱动部223可以连接第二传动部225以输出第二传动力。作为一种实现方式,割草机构也可以直接连接至第一驱动部222,而自走机构需要通过传动机构连接至第二驱动部223。作为一种实现方式,马达轴221包括第一端226和第二端227。其中,第一驱动部222设置在第一端226,其被设置为与马达轴221固定连接,并能连接第一传动部224从而直接传递马达轴221的驱动力至割草元件。第二驱动部223设置在第一端226和第二端227之间,其被设置为与第二传动部225配合,从而改变第二驱动部223的运行形式。具体的,第一驱动部222被设置为能固定第一传动部224的外螺纹结构,第一传动部224被设置为能与第一驱动部222连接的内螺纹结构。这里,对于第一传动部224而言,当采用第一驱动部222直驱工作附件时,也可以不设置第一传动部224;换言之,即使第一驱动部222直驱工作附件,用于将工作附件连接至第一驱动部222的连接件也可以被视为第一传动部224。第二驱动部223被设置为能传递动力的齿轮结构或带轮结构,此处不作限定。第二传动部225包括传动带225a、调速轮225b和输出端225c。其中,传动带225a连接第二驱动部223和输出端225c,并能将第二驱动部223处的动力传递至输出端225c。调速轮225b通过压紧或放松传动带225a,以调节传动带225a的传动效率。具体的,当调速轮225b压紧传动带225a时,传动带225a能与第二驱动部223更紧密的配合,从而能传递较多的动力至输出端225c;当调速轮225b放松传动带225a时,传动带225a能传递较少的动力至输出端225c。
38.可以理解,第一驱动部222与第二驱动部223还可以设置为单独的驱动部,即第一驱动部222与第二驱动部223重合设置,此时第一传动部224与第二传动部225同时连接至第一驱动部222或第二驱动部223。也可以仅设置第一驱动部222或第二驱动部223,此时第一传动部224和第二传动部225也同时连接至第一驱动部222或第二驱动部223。还可以设置第一传动部224与第二传动部225至少部分重合,从而使得第一传动部224和第二传动部225能同时连接至第一驱动部222或第二驱动部223。这里需要解释的是,即使第一传动部224和第
二传动部225至少部分重合设置,其也能输出两种形式的传动力,且二者之间并不干涉。
39.通过上述设置,马达22能够输出不通形式的动力,并能合理进行动力分配,简化了动力装置200的结构,并使得动力装置200的功能多元化。此外,对于能输出多种功能的执行设备30而言,具备多元化功能的动力装置200也使得执行设备30的功能输出得到满足,避免安装其他动力元器件。可以理解,动力装置200还可以设置为仅输出一种动力,从而使得动力装置200能适配不同类型的执行设备30,使得动力装置200的适配性更强。
40.如图12、图19及图20所示,动力装置200还包括设置在进风口213或出风口214处的进风网218,进风网218采用快拆结构,从而便于更换或清洗。具体的,进风口213和出风口214设置在壳体21的远离马达轴221的位置,即设置在壳体21的侧面靠上的位置。通过这样的设置,可以使得进风口213或出风口214远离马达轴221所连接的工作附件,从而避免工作附件在工作过程中产生的碎屑或粉尘进入至进风口213或出风口214处。此外,壳体21内侧设置有限位槽215,进风网218通过限位销216与限位槽215配合以安装至壳体21上,或从壳体21上拆卸下来。具体的,壳体21上形成有可供限位销216通过的扁位孔217,限位销216上形成有限位部。当限位销216以第一角度穿过扁位孔217时,此时限位部与扁位孔217平行,从而能够通过扁位孔217。当限位销216转动至第二角度时,此时限位部与扁位孔217垂直,无法从扁位孔217中穿过,从而能够对进风网218进行限位。
41.通常,动力装置200作为一种外接动力单元,其包括动力输出、能源供应、控制等集成。而对于一些执行设备30而言,其为了满足工况需求,需要其输出较大功率,并能保持较长的续航时间,且需要方便用户操控。而现有技术中揭示的动力装置200无法同时满足上述需求。事实上,对于一些动力装置200而言,其为了满足较长的续航时间,而无法满足高功率需求。而对于一些能输出较高功率的动力装置200而言,其无法满足续航要求和散热要求,从而导致其能保持输出较高功率的时间非常短暂,无法满足执行设备30的实际需求。表1示出了动力装置200的最大输出功率、重量及其功率重量比的关系。
42.表1在本实施方式中,马达22的最大输出功率p设置为大于等于1500w且小于等于5500w,动力装置200在未安装电源组件24时,其整机的质量m1大于等于8kg且小于等于14.5kg,最大输出功率p与整机的质量m1的比值大于等于103.5 w/kg且小于等于687.5w/kg。而最大输出功率p与整机的质量m1的比值大于等于120 w/kg且小于等于500w/kg时,动力装置200整个系统具备能够持续输出最佳的高功率水平的能力,并能具备更长的使用寿
命。
43.而在本实施方式中,动力装置200的质量更趋于大于等于10kg且小于等于12kg,且马达22最大输出功率更趋于大于等于2000w且小于等于4000w。电源组件24也具备一个预设质量m2,m2设置为大于等于1.3kg且小于等于8kg。电源组件24包括第一类电源241和第二类电源242,且动力装置200包括能安装第一类电源241或第二类电源242,或同时安装第一类电源241和第二类电源242并正常工作的功能,从而使得动力装置200在安装电源组件24后,具有大于等于9.3kg且小于等于22.5kg的重量。
44.在本实施方式中,动力装置200被安装至执行设备30以输出动力,而为了适应动力装置200,避免动力装置200安装至执行设备30时,整个系统无法正常运行,执行设备30还具备质量m3,且设置动力装置200的质量m1与执行设备30的质量m3的比值大于等于0.25且小于等于0.46,从而保证动力装置200安装至执行设备30时,整个系统具有较高的稳定性,并能持续且可靠的输出动力。进一步而言,当动力装置200的质量m1与执行设备30的质量m3的比值大于等于0.3且小于等于0.4时,当动力装置200安装至执行设备30时,整个系统具有更高的稳定性,并能更加持续且可靠的输出动力。
45.在本实施方式中,马达轴221上连接有切割附件,切割附件可被马达轴221驱动并能围绕马达轴221转动。切割附件具有一个转动半径r,该转动半径大于等于200mm且小于等于325mm。马达22的最大输出功率p与转动半径r的乘机大于等于300kw
·
mm且小于等于1788kw
·
mm。
46.此外,通过上述设置,使得动力装置200在安装至执行设备30时,其整体上重心更加集中,稳定性更好。事实上,动力装置200基本关于第一平面对称设置。如图21所示,当动力装置200安装至执行设备30时,这里以割草机为例,割草机具备行走组件29、主机体和把手。当动力装置200安装至主机体时,沿垂直于第一平面的左右方向上,第一平面距离主机体的左侧边缘的距离大于等于80mm且小于等于150mm;动力装置200距离主机体的右侧边缘的距离大于等于80mm且小于等于150mm。通过这样的设置,能够使得动力装置200能够安装在主机体的预设位置,并确保动力装置200与主机体结合后,其重心与主机体趋于一致,或动力装置200与主机体的结合体的重心位于行走组件29之间,从而确保二者结合后在运行过程中更加平稳。具体而言,动力装置200自身具有第一重心p1,执行设备30具有第二重心p2,沿执行设备30前进方向上,第一重心p1与第二重心p2之间的距离大于等于0且小于等于335mm。进一步而言,沿执行设备30前进方向上,第一重心p1与第二重心p2之间的距离大于等于0且小于等于200mm。可以理解,动力装置200在连接至执行设备30后,其二者之间的重心距离被设置在上述尺寸范围内时,能保证执行设备30行进过程中,其整体重心居中,且运行状况稳定,不会在过坑或越坡时发生倾覆。此外,动力装置200包括基本沿前后方向延伸的第一平面,动力装置200基本关于第一平面对称设置。第一重心p1沿垂直于第一平面101的左右方向上距离第一平面的距离大于等于0且小于等于80mm。执行设备30基本关于第一平面对称设置,第二重心p2沿垂直于第一平面的左右方向上距离第一平面的距离大于等于0且小于等于100mm。
47.此外,行走组件29包括第一行走组件291和第二行走组件292。其中,第一行走组件291位于割草机前进方向的前侧,第二行走组件292位于执行设备30的前进方向的后侧。第一行走组件291具有第一转动轴线202,第二行走组件292具有第二转动轴线203。当动力装
置200安装至主机体时,沿执行设备30前进方向上,动力装置200的第一重心距离第一转动轴线202的距离大于等于74mm且小于等于465mm。执行设备30的第二重心距离第二转动轴线203的距离大于等于0mm且小于等于200mm。通过这样的设置,能进一步提高动力装置200安装至执行设备30后,二者的结合体在行走过程中的稳定性。
48.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,上述实施例不以任何形式限制本发明,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1