一种电动机器的制作方法
1.本主题大体涉及一种电动机器。本主题具体地但非排他性地涉及控制车辆的电动机器的操作。
背景技术:
2.电动马达是电动车辆或混合车辆中重要的动力来源。马达的性能影响电动车辆的整体性能。电动马达包括转子和定子。定子包括绕组、永磁体或称为层压层的金属片。电动马达中的定子提供旋转磁场以驱动旋转电枢。
3.电动马达性能直接影响车辆或在电动马达上运行的任何机器的整体性能。当在极端负载下操作时,电动马达绕组变热,从而降低了车辆的效率。照此,推进系统不仅需要用于电动马达的冷却系统,而且还需要用于电池组,以确保高效的操作并最大化电气部件和车辆寿命。
附图说明
4.参考附图进行详细描述。在整个附图中使用相同的附图标记来指代相同的特征和部件。
5.图1示出了本发明的框图,其描绘了电动机器。
6.图2示出了电动机器的马达控制单元的架构。
7.图3示出了电动马达的电路级图。
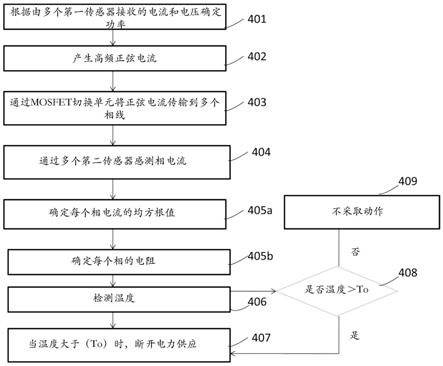
8.图4示出了控制电动机器的方法的流程图。
具体实施方式
9.马达的温度不升高超过一定阈值总是必要的,该阈值可能会影响车辆的驾驶性能。为此目的,已经使用了各种方法,诸如放置在马达绕组上以直接反应温度的热敏电阻或其他温度检测器,或响应于过量电流(如果允许该过量电流继续将产生过热)使马达电路断路器跳闸的电流响应装置。
10.存在诸如万用表类型仪器的电阻测量装置,它能够测量高达100欧姆的电阻,并且因此万用表类型仪器对于可以具有10
‑
100欧姆范围内的相绕组电阻(phase winding resistance)的小型机器是最佳的。具有较低绕组电阻的大型机器使用像开尔文电桥这样的四端电桥来实现精度。但是开尔文电桥具有与以下相关的问题:为获得更好的灵敏度而对电流的高要求、需要手动平衡以及需要用于检测平衡条件的电流计。
11.测量马达绕组温度的另一个已知的方法是通过将小的直流分量引入马达电流,这可以通过在马达电路中连接不对称电阻装置来实现。可以从测量直流分量和对应的电压来确定马达绕组的电阻。但是这些方法具有它们各自的缺点,例如由于电阻测量电路在电阻值很高时压缩刻度,在测量电阻的范围方面受限以及精密度低,易于出错的方法,例如平衡问题。但是在以上提及的所有方法中,常见的问题是需要附加部件来测量电阻,这导致成本
的增加,并且同时还使得整个系统庞杂。此外,引入新的部件导致对引入部件的依赖性,这降低了马达的可靠性。
12.电动马达使用内置传感器来执行诸如检测相电流和相电压这样的重要功能,并且设置在电动马达中的一些传感器被用来测量从电池提取的以运行电动马达的电力。为克服上述缺点,本主题使得设置在电动马达中的传感器能够通过控制器测量每个绕组中的电阻并从而通过生成高频正弦信号和检测每个绕组的电阻来控制电动马达的操作。取决于电阻,测量绕组的温度并基于温度控制电动马达的操作。因此,本主题提供了克服在现有技术中提及的问题(例如使用额外的元件、包装限制等)的优点。
13.为了进一步冷却通常在布局方面紧凑的骑乘式两轮车辆中的电动马达,仍然存在与空间和包装限制相关的另外的挑战。此外。提供冷却机构的手段增加了对有限空间的挑战。因此,存在设计紧凑的、成本低廉的、高可靠性的电动机器的挑战,该电动机器可以在额定负载以及超额定负载下安全地操作而不会发生不利的热失控或灾难性故障。
14.因此,为克服以上提及的挑战,通过消除对任何用于确定温度的附加部件(诸如热敏电阻)和基于检测到的温度控制电动机器的启动操作的需要,本主题提供了一种可以检测绕组温度的电动机器,并且从而通过消除对用于确定温度的附加部件(例如,传感器)的需要减少了额外的成本,并且还提供了紧凑的包装。此外,如果附加的传感器失效,系统将变得相当脆弱,并且可能导致例如火灾的灾难性故障、热失控(thermal runaway)或驾驶员可能被困在路中间。因此,传感器的可靠性要求很高,导致传感器的成本高。在不使用附加部件的情况下,电动机器操作的可靠性增加,因为电动马达不依赖于任何附加部件。进一步,本主题使得车辆的驾驶员能够知道何时需要维修电动机器,因为在适当的时间段内绕组的电阻增加,并且电动机器的控制器中的诊断系统将向用户指示这一情况。
15.本主题的另一方面提供了一种马达控制单元以控制对电动马达的电力供应。马达控制单元包括微控制器,该微控制器产生高频正弦电流并将高频正弦电流传输到电动马达的一个或多个相线。调整高频正弦电流为接近电动机器的额定频率以获得合适的正弦电流。
16.本主题的又一方面提供了一种微控制器,该微控制器使得设置在电动机器中的多个第一传感器能够检测供应到电动马达的电源的直流电压和直流电流。微控制器根据检测到的直流电压和直流电流的值来确定直流功率。
17.本主题的又一方面是提供一种微控制器,该微控制器使得设置在电动机器的一个或多个相线中的多个第二传感器能够检测一个或多个相电流。
18.本主题的另一方面是提供一种换向装置,诸如mosfet切换单元(也称为用作换向装置的六脉冲半桥电路或b6桥接电路)。mosfet切换单元接收来自微控制器的正弦电流并执行桥接操作。mosfet切换单元包括一个或多个电桥,该一个或多个电桥连接至电动马达的所述一个或多个相线。mosfet切换单元的每个电桥包括两个mosfet切换以执行切换操作。
19.本主题的另一方面是通过处理所述一个或多个相线的一个或多个相电流的均方根值和电源的直流功率来确定电动马达的所述一个或多个相线的电阻。
20.本主题的又一方面是根据所述电阻来确定电流温度,并比较所述电流温度与预定温度(制造商设定的温度值),以及基于相线的电流温度控制电动马达的致动。
21.通过以下描述、所附权利要求和附图将更好地理解本主题的以上方面和相关联的优点。
22.图1示出了描绘电动机器(100)的本发明的框图,该电动机器(100)包括诸如电池这样的用于驱动电动马达(103)的电源(101)。马达控制单元(102)控制对电动马达(103)的电力供应。
23.图2示出了电动机器(100)的马达控制单元(102)的架构。马达控制单元(102)将电源(101)电连接到电动马达(103)。马达控制单元(102)包括适于感测dc电压(v
dc
)和dc电流(i
dc
)的多个第一传感器(105,106)。所述多个第一传感器(105,106)是横跨电源(101)连接以感测电源(101)的电压的dc电压传感器(105)和连接至电源(101)的正端子以感测接收到的从电源(101)至电动马达(103)的电流的dc电流传感器(106)。
24.所述多个第一传感器(105,106)连接至微控制器(107)。微控制器(107)适于接收来自所述多个第一传感器(105,106)的输入并确定从电源(101)接收到的直接功率(p)[p=v
dc
i
dc
]。多个第一传感器(105,106)可以是基于霍尔(halls based)的隔离式传感器(isolated sensor)或基于分流器(shunt based)的传感器。
[0025]
微控制器(107)能够产生正弦电流的高频波。微控制器(107)连接至金属氧化物半导体场效应管(mosfet)切换单元(108),并且mosfet切换单元(108)由微控制器(107)产生的正弦电流控制以实现桥接操作(或mosfet切换)。
[0026]
通过产生和供应高频的正弦电流,产生了转矩,该转矩提供电动马达中的微量运动。在mosfet切换单元(108)的桥接操作(bridge operation)之后,微控制器(107)产生的高频正弦电流然后被供应到电动马达(103)的一个或多个相线(lr,ly,lb)。连接电动马达(103)的不同相位的每个相线(lr,ly,lb)设置有多个第二传感器(110,111,112)。所述多个第二传感器(110,111,112)适于感测每个相线(lr,ly,lb)中的正弦电流(ir,iy,ib)的高频波。高频的正弦电流被保持为非常接近电动机器的额定频率,以获得高频正弦电流。多个第二传感器(110,111,112)可以是基于霍尔的隔离式传感器或基于分流器的传感器。
[0027]
图3示出了本主题的电路级图。三相激励(excitation)绕组布置在电动马达(103)的定子(未示出)中。在mosfet切换单元(108)的桥接操作之后,向电动马达(103)提供正弦电流,并且电动马达(103)的每个相绕组的多个第二传感器(110,111,112)感测相电流(ir,iy,ib)并将其发送到微控制器(107)以确定相电流(ir,iy,ib)的均方根(rms)值。
[0028]
相绕组通过mosfet切换单元(108)中的一个或多个mosfet开关(m1,m2,m3,m4,m5,m6)以星形模式连接。mosfet切换单元(108)也称为用作换向装置(commutation device)的六脉冲半桥电路或b6桥接电路。
[0029]
mosfet切换单元(108)的第一桥(b1)包括m1 mosfet和m4 mosfet。第一桥(b1)的中心节点连接到电动马达(103)的红相(r)。类似地,mosfet切换单元(108)的第二桥(b2)包括m2 mosfet和m5 mosfet并且第二桥(b2)的中心节点连接到电动马达(103)的黄相(y)。mosfet切换单元(108)的第三桥(b3)包括m3 mosfet和m6 mosfet并且第三桥(b3)的中心节点连接到电动马达(103)的蓝相(b)。
[0030]
提供了将mosfet切换单元(108)中的mosfet开关(m1,m2,m3,m4,m5,m6)连接到微控制器(107)的栅极驱动器(109)。微控制器(107)使得栅极驱动器(109)能够通过控制mosfet开关(m1,m2,m3,m4,m5,m6)中的一个或多个栅极端子来致动mosfet开关(m1,m2,m3,
m4,m5,m6)的切换。
[0031]
相电流
‘
ir’流动通过电动马达(103)的红相(r),相电流
‘
iy’流动通过电动马达(103)的黄相(y),并且相电流
‘
ib’流动通过电动马达(103)的蓝相(b)。
[0032]
微控制器(107)适于计算多个相线(lr,ly,lb)中的相电流(ir,iy,ib)的均方根电流(i
rms
)。通过每个相中的均方根电流,可以确定相绕组中的电阻,并且基于每个相绕组电阻的值,根据以下物理方程,可以基于绕组材料的温度系数确定对应的温度。
[0033]
i
α
=i
r
[0034]
i
β
=i
r
+2i
y
[0035][0036]
p=v
dc
*i
dc
[0037][0038]
r=r
ref
[1+α(t
‑
t
ref
)]
[0039]
其中
‘
α’是电动马达的相线的温度系数。
[0040]
i
r
=绕组的红相中的电流
[0041]
i
y
=绕组的黄相中的电流
[0042]
i
b
=绕组的蓝相中的电流
[0043]
i
α
=两相静止参考框架系统中的α相电流
[0044]
i
β
=两相静止参考框架系统中的β相电流
[0045]
i
m
=马达电流的均方根值(irms)
[0046]
t
ref
=测量参考马达电阻时的温度
[0047]
r
ref
=在温度t
ref
下马达电阻的测量值
[0048]
p=马达中消耗的功率
[0049]
图4示出了控制电动机器(100)的方法的流程图。在步骤401,根据由多个第一传感器(105,106)检测到的直流电压(v
dc
)和直流电流(i
dc
)确定功率。检测电源(101)两端的直流电压(vdc),并且通过微控制器(107)接收来自电源(101)的直流电流(idc)。在步骤402,微控制器(107)产生高频正弦电流。在步骤403,在mosfet切换单元(108)的桥接操作之后,正弦电流传输到电动马达(103)的所述一个或多个相线(lr,ly,lb)。
[0050]
在步骤404,多个第二传感器(110,111,112)感测电动马达(103)的每个相线(lr,ly,lb)中的相电流(ir,iy,ib)。在步骤404中的感测到相电流(ir,iy,ib)之后,在步骤405a,微控制器(107)确定每个相电流的均方根值,并且在步骤405b,基于每个相的均方根电流(irms)和基于如步骤401中所述的直流电压(vdc)和直流电流(idc)而确定的直流功率(p),通过计算出的直流功率(p)值和均方根电流(irms)值来确定每个相线(lr,ly,lb)的对应的电阻。
[0051]
微控制器(107)基于相线(lr,ly,lb)的电阻确定电动机器的温度。温度随电阻的增加而增加,因为温度与电阻成正比,并且对于在电动马达(103)的绕组中使用的铜材(使温度如以上方程中所提及的那样随绕组电阻的增加而增加),电阻(α)的温度系数为正。在步骤406,微控制器(107)检测电动马达(103)的相线的电流温度,并且在步骤408,微控制器
(107)将检测到的电动马达(103)的电流温度与预定的温度(to)作比较。如果发现电动马达(103)的温度大于预定的温度(to),则在步骤407,断开从电源(101)到电动马达(103)的电力供应,直到电动马达(103)的温度低于预定的温度(to)。当电动马达(103)的温度低于预定的温度(to)时,在步骤209中不采取动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1