一种基于模糊理论的储能变流器虚拟同步自适应控制方法
1.本发明涉及储能变流器控制方法技术领域,具体为一种基于模糊理论的储能变流器虚拟同步自适应控制方法。
背景技术:
2.随着可再生能源发电的快速发展,其在电网中的渗透率逐年提升,以风光发电为代表的可再生能源以及电池储能系统均需要经过电力电子换流器并入电网;然而,并网的电力电子换流器通常采用电网电压定向的电流控制,使得这类电源对电网体现为电流源性质,无法为电力系统提供惯性,因此,这类电源在传统控制策略下会对电网稳定性带来消极影响。
3.针对这个问题,通过改变电力电子变流器的控制策略使得这类电源模拟同步发电机的特性的虚拟同步机(vsg)控制技术得到了广泛重视,采用vsg的变流器可以使得风光电源和电池储能系统为电网提供必要的转动惯量和阻尼,从而提高可再生能源渗透电网的稳定性,并可参与对电网的主动调节;然而,电网和储能系统的状态对vsg响应特性具有较大影响,并且变化规律也比较复杂。
4.因此,发明一种基于模糊理论的储能变流器虚拟同步自适应控制方法来解决上述问题很有必要。
技术实现要素:
5.本发明的目的在于提供一种基于模糊理论的储能变流器虚拟同步自适应控制方法,通过模拟同步机励磁调节器特性、原动机调速器以及同步机转子运动方程,使得储能系统具有类似同步发电机的调压和一次调频性能,在此基础上增加了虚拟参数自适应优化模块,虚拟参数自适应优化环节采用模糊控制确定各虚拟参数的取值来调整变流器虚拟同步控制参数以动态自适应系统状态,进而增强了储能系统vsg的可持续工作时间和平抑波动能力,提高vsg的动态响应性能。
6.为实现上述目的,本发明提供了如下方案:
7.一种基于模糊理论的储能变流器虚拟同步自适应控制方法,包括:
8.s1、vsg的无功
‑
电压环节模拟同步机的无功
‑
电压下垂特性;
9.s2、vsg的有功
‑
频率环节模拟原动机调速器的有功
‑
频率下垂特性以及同步机转子运动方程的二阶模型;
10.s3、虚拟参数自适应优化环节确定各虚拟参数的取值来调整变流器虚拟同步控制参数以动态自适应系统状态。
11.进一步地,所述步骤s3中的虚拟参数自适应环节采用了模糊控制理论进行变流器虚拟同步控制参数自适应调整,具体实现过程如下:
12.a1、确定输入输出变量,以储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
等状态变量作为输入变量,以无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以
及虚拟阻尼系数d等参数作为输出变量;
13.a2、确定虚拟参数自适应环节输入变量的量化因子和输出变量的比例因子,模糊控制器输入变量与输出变量经过对应的量化因子或比例因子,实现各自实际论域的确切量与各自模糊论域模糊量的一一映射,完成确切量与模糊量的论域转化;
14.a3、确定虚拟参数自适应环节输入输出变量的隶属函数,得到储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
等输入状态变量的模糊取值;
15.a4、确定虚拟参数自适应环节模糊控制规则,得到无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d等输出虚拟参数的设定值。
16.进一步地,所述a2步骤中的虚拟参数自适应环节输入变量的量化因子和输出变量的比例因子计算如下过程:
17.b1、设输入变量储能系统soc水平的基本模糊论域为[0,1],系统母线电压u
*
的基本模糊论域为系统母线角频率ω
*
的基本模糊论域为它们对应的模糊语言变量s、v、ω的模糊子集论域分别表示为{0,1,...,x
s
}、{0,1,...,x
v
}、{0,1,...,x
ω
};
[0018]
b2、设输出变量无功
‑
电压下垂系数n的基本模糊论域为[0,n
max
],虚拟调差系数m的基本模糊论域为[0,m
max
]、虚拟惯量时间常数h的基本模糊论域为[0,h
max
],虚拟阻尼系数d的基本模糊论域为[0,d
max
],它们对应的模糊语言变量n、m、h、d的模糊子集论域分别表示为{0,1,...,x
n
}、{0,1,...,x
m
}、{0,1,...,x
h
}、{0,1,...,x
d
};
[0019]
b3、输入变量的量化因子和输出变量的比例因子由变量基本模糊论域最大值和变量模糊子集论域最大值决定:
[0020][0021]
式中,k为输入变量的量化因子或输出变量的比例因子,x为变量基本模糊论域最大值,x为变量模糊子集论域最大值;
[0022]
b4、输入变量储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
的量化因子为:
[0023][0024]
b5、输出变量无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d的比例因子为:
[0025][0026]
进一步地,所述步骤a3中的虚拟参数自适应环节输入输出变量的隶属函数,各变
量模糊子集的划分和隶属函数的选择,具体实现过程如下:
[0027]
c1、选取3个或7个模糊变量。其中,输入模糊语言变量v、ω的模糊集合划分为3个模糊子集,分别为负(n)、零(z)、正(p);输入模糊语言变量s以及输出模糊语言变量n、m、h、d的模糊集合划分为7个模糊子集,分别为负大(nb)、负中(nm)、负小(ns)、零(zo)、正小(ps)、正中(pm)、正大(pb),表示为:
[0028][0029]
c2、采用具有着较高灵敏度的钟形隶属函数中的正态曲线作为各模糊集合的隶属函数,正态函数如下式所示:
[0030][0031]
式中,a代表正态隶属函数中间值,b代表正态隶属函数的宽度。
[0032]
进一步地,所述s1步骤中vsg无功
‑
电压下垂方程如下式所示:
[0033][0034]
式中,为vsg实际输出无功功率标幺值,为指令无功功率标幺值,u
*
为系统母线电压标幺值,n为无功
‑
电压下垂系数。
[0035]
进一步地,所述s2步骤中vsg的有功
‑
频率环节用于模拟原动机调速器以及同步机转子运动方程,具体通过模拟原动机调速器的有功
‑
频率下垂特性以及同步机转子运动方程的二阶模型,采用的vsg有功
‑
频率下垂方程以及转子运动方程如下所示:
[0036][0037]
式中,为vsg实际输出有功功率标幺值,为指令有功功率标幺值,ω
*
为系统母线角频率标幺值,m为虚拟调差系数,为虚拟原动机有功功率标幺值,h为虚拟惯量时间常数,d为虚拟阻尼系数。
[0038]
本发明的有益效果是:本发明通过模拟同步机励磁调节器特性、原动机调速器以及同步机转子运动方程,使得储能系统具有类似同步发电机的调压和一次调频性能,在此基础上增加了虚拟参数自适应优化模块,进而增强了储能系统vsg的可持续工作时间和平抑波动能力,提高vsg的动态响应性能。
附图说明
[0039]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0040]
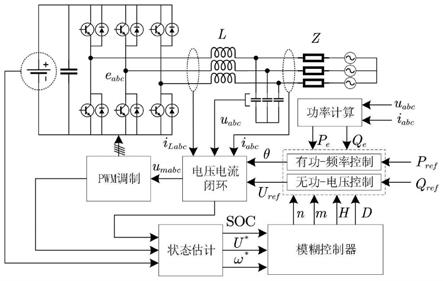
图1为本发明基于模糊理论的储能变流器vsg控制模型图;
[0041]
图2为本发明无功
‑
电压环节控制框图;
[0042]
图3为本发明有功频率环节控制框图。
具体实施方式
[0043]
下面将结合附图及具体实施方式进一步说明本发明。
[0044]
如图1
‑
3所示的一种基于模糊理论的储能变流器虚拟同步自适应控制方法,包括:
[0045]
s1、vsg的无功
‑
电压环节模拟同步机的无功
‑
电压下垂特性,所述s1步骤中vsg无功
‑
电压下垂方程如下式所示:
[0046][0047]
式中,为vsg实际输出无功功率标幺值,为指令无功功率标幺值,u
*
为系统母线电压标幺值,n为无功
‑
电压下垂系数;
[0048]
s2、vsg的有功
‑
频率环节模拟原动机调速器的有功
‑
频率下垂特性以及同步机转子运动方程的二阶模型,所述s2步骤中vsg的有功
‑
频率环节用于模拟原动机调速器以及同步机转子运动方程,具体通过模拟原动机调速器的有功
‑
频率下垂特性以及同步机转子运动方程的二阶模型,采用的vsg有功
‑
频率下垂方程以及转子运动方程如下所示:
[0049][0050]
式中,为vsg实际输出有功功率标幺值,为指令有功功率标幺值,ω
*
为系统母线角频率标幺值,m为虚拟调差系数,为虚拟原动机有功功率标幺值,h为虚拟惯量时间常数,d为虚拟阻尼系数;
[0051]
s3、虚拟参数自适应优化环节确定各虚拟参数的取值来调整变流器虚拟同步控制参数以动态自适应系统状态;
[0052]
所述步骤s3中的虚拟参数自适应环节采用了模糊控制理论进行变流器虚拟同步控制参数自适应调整,具体实现过程如下:
[0053]
a1、确定输入输出变量,以储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
等状态变量作为输入变量,以无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d等参数作为输出变量;
[0054]
a2、确定虚拟参数自适应环节输入变量的量化因子和输出变量的比例因子,模糊控制器输入变量与输出变量经过对应的量化因子或比例因子,实现各自实际论域的确切量与各自模糊论域模糊量的一一映射,完成确切量与模糊量的论域转化;
[0055]
a3、确定虚拟参数自适应环节输入输出变量的隶属函数,得到储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
等输入状态变量的模糊取值;
[0056]
a4、确定虚拟参数自适应环节模糊控制规则,得到无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d等输出虚拟参数的设定值;
[0057]
所述a2步骤中的虚拟参数自适应环节输入变量的量化因子和输出变量的比例因子计算如下过程:
[0058]
b1、设输入变量储能系统soc水平的基本模糊论域为[0,1],系统母线电压u
*
的基本模糊论域为系统母线角频率ω
*
的基本模糊论域为它们对应的模糊语言变量s、v、ω的模糊子集论域分别表示为{0,1,...,x
s
}、{0,1,...,x
v
}、{0,1,...,x
ω
};
[0059]
b2、设输出变量无功
‑
电压下垂系数n的基本模糊论域为[0,n
max
],虚拟调差系数m
的基本模糊论域为[0,m
max
]、虚拟惯量时间常数h的基本模糊论域为[0,h
max
],虚拟阻尼系数d的基本模糊论域为[0,d
max
],它们对应的模糊语言变量n、m、h、d的模糊子集论域分别表示为{0,1,...,x
n
}、{0,1,...,x
m
}、{0,1,...,x
h
}、{0,1,...,x
d
};
[0060]
b3、输入变量的量化因子和输出变量的比例因子由变量基本模糊论域最大值和变量模糊子集论域最大值决定:
[0061][0062]
式中,k为输入变量的量化因子或输出变量的比例因子,x为变量基本模糊论域最大值,x为变量模糊子集论域最大值;
[0063]
b4、输入变量储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
的量化因子为:
[0064][0065]
b5、输出变量无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d的比例因子为:
[0066][0067]
所述步骤a3中的虚拟参数自适应环节输入输出变量的隶属函数,各变量模糊子集的划分和隶属函数的选择,具体实现过程如下:
[0068]
c1、选取3个或7个模糊变量。其中,输入模糊语言变量v、ω的模糊集合划分为3个模糊子集,分别为负(n)、零(z)、正(p);输入模糊语言变量s以及输出模糊语言变量n、m、h、d的模糊集合划分为7个模糊子集,分别为负大(nb)、负中(nm)、负小(ns)、零(zo)、正小(ps)、正中(pm)、正大(pb),表示为:
[0069][0070]
c2、采用具有着较高灵敏度的钟形隶属函数中的正态曲线作为各模糊集合的隶属函数,正态函数如下式所示:
[0071][0072]
式中,a代表正态隶属函数中间值,b代表正态隶属函数的宽度。
[0073]
如图1所示,本发明基于储能系统变流器的vsg控制模型,主要由无功
‑
电压控制模块、有功
‑
频率控制模块、参数自适应优化模块组成。
[0074]
如图2所示,本发明基于vsg的无功
‑
电压环节的实现方式,先根据vsg的无功指令和下垂环节得到无功参考值,与检测值的实际无功输出值做差后通过比例积分环节再与额定电压相叠加得到调制电压。vsg的无功
‑
电压环节用于模拟同步机励磁调节器特性,具体通过模拟同步机的无功
‑
电压下垂特性来实现,采用的vsg无功
‑
电压下垂方程如下式所示:
[0075][0076]
式中,为vsg实际输出无功功率标幺值,为指令无功功率标幺值,u
*
为系统母线电压标幺值,n为无功
‑
电压下垂系数。
[0077]
如图3所示,vsg的有功
‑
频率环节的实现方式,先根据vsg的有功指令和下垂环节得到有功参考值,与检测值的实际有功输出值做差后通过惯量阻尼环节得到转速差,再与额定转速相叠加得到输出角频率。输出角频率通过积分环节改变调制相位,进而改变实际出力。vsg的有功
‑
频率环节用于模拟原动机调速器以及同步机转子运动方程,具体通过模拟原动机调速器的有功
‑
频率下垂特性以及同步机转子运动方程的二阶模型,采用的vsg有功
‑
频率下垂方程以及转子运动方程如下所示:
[0078][0079]
式中,为vsg实际输出有功功率标幺值,为指令有功功率标幺值,ω
*
为系统母线角频率标幺值,m为虚拟调差系数,为虚拟原动机有功功率标幺值,h为虚拟惯量时间常数,d为虚拟阻尼系数。
[0080]
本发明基于储能系统变流器的vsg控制模型的参数自适应优化环节的工作过程如下:
[0081]
1、参数自适应优化环节用于调整变流器虚拟同步控制参数以动态自适应系统状态。具体以储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
等状态变量作为输入变量,以无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d等参数作为输出变量,采用模糊理论确定各虚拟参数的取值;
[0082]
2、确定输入变量的量化因子和输出变量的比例因子,模糊控制器输入变量与输出变量经过对应的量化因子或比例因子,实现各自实际论域的确切量与各自模糊论域模糊量的一一映射,完成确切量与模糊量的论域转化;
[0083]
3、设输入变量储能系统soc水平的基本模糊论域为[0,1],系统母线电压u
*
的基本模糊论域为系统母线角频率ω
*
的基本模糊论域为它们对应的模糊语言变量s、v、ω的模糊子集论域分别表示为{0,1,...,x
s
}、{0,1,...,x
v
}、{0,1,...,x
ω
};
[0084]
4、设输出变量无功
‑
电压下垂系数n的基本模糊论域为[0,n
max
],虚拟调差系数m的基本模糊论域为[0,m
max
]、虚拟惯量时间常数h的基本模糊论域为[0,h
max
],虚拟阻尼系数d的基本模糊论域为[0,d
max
]。它们对应的模糊语言变量n、m、h、d的模糊子集论域分别表示为{0,1,...,x
n
}、{0,1,...,x
m
}、{0,1,...,x
h
}、{0,1,...,x
d
};
[0085]
5、输入变量的量化因子和输出变量的比例因子由变量基本模糊论域最大值和变量模糊子集论域最大值决定:
[0086][0087]
式中,k为输入变量的量化因子或输出变量的比例因子,x为变量基本模糊论域最大值,x为变量模糊子集论域最大值。即输入变量储能系统soc水平、系统母线电压u
*
、系统母线角频率ω
*
的量化因子为:
[0088][0089]
输出变量无功
‑
电压下垂系数n、虚拟调差系数m、虚拟惯量时间常数h以及虚拟阻尼系数d的比例因子为:
[0090][0091]
6、确定输入输出变量的隶属函数,选取3个或7个模糊变量。其中,输入模糊语言变量v、ω的模糊集合划分为3个模糊子集,分别为负(n)、零(z)、正(p);输入模糊语言变量s以及输出模糊语言变量n、m、h、d的模糊集合划分为7个模糊子集,分别为负大(nb)、负中(nm)、负小(ns)、零(zo)、正小(ps)、正中(pm)、正大(pb),表示为:
[0092][0093]
7、采用具有着较高灵敏度的钟形隶属函数中的正态曲线作为各模糊集合的隶属函数,正态函数如下式所示:
[0094][0095]
式中,a代表正态隶属函数中间值,b代表正态隶属函数的宽度;
[0096]
8、确定模糊控制规则
[0097]
无功
‑
电压下垂系数n的模糊规则表
[0098]
[0099][0100]
虚拟调差系数m的模糊规则表
[0101][0102]
虚拟惯量时间常数h的模糊规则表
[0103]
[0104][0105]
虚拟阻尼系数d的模糊规则表
[0106]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1