一种变功率三相电机
1.本发明属电动机制造和电动机控制技术领域,特别涉及一种变功率三相电机。
背景技术:
2.有调查显示,我国各类电动机每年的用电量在电能消耗中约占60%以上。其中三相鼠笼式异步电机由于有结构简单,运行可靠,价格便宜等优点得到了广泛的应用。
3.在油田应用环境中,抽油机由于油压不恒定无法一直在额定功率下工作,电动机需求的额定负载较大,但实际工作时多工作在轻载状态。类似的问题在工农业中也十分常见,三相异步电动机虽然价格便宜、运行可靠,但在实际使用中由于多运行在轻载条件下,会造成巨大的电能损耗,直接影响工农业生产的经济效益。
4.传统电机软启动的方法有星
‑△
启动、自耦变压器启动等,通过在运行和启动中结合使用这些方法可以达到变功率的目的,但都存在一定的问题。星
‑△
启动一般只适用于较小功率的电动机,而且功率变化范围有限;自耦变压器启动可用于较大功率的电动机,但其设备体积庞大,综合成本偏高,也无法满足低碳和节能的要求。
5.随着大功率半导体技术发展,晶闸管软启动、变频器等利用相控器件实现调速调节功率的方法和器件越来越多,但由于其成本高、对安装维护人员有一定的技术要求和产生谐波干扰等问题,在实际应用中仍然较少。
6.近年来,有一些文献提出对绕组进行串并联将接线端引出的方式,这种方式虽然能实现变功率,但简单将绕组分段串联或者并联的利用率和效率很低,并不符合节能的要求。
技术实现要素:
7.一种变功率三相电机,其特征是:包括外壳以及设置在外壳内的定子、转子、定子绕组以及鼠笼绕组;其中,定子绕组由三相组成,记为a相、b相和c相;每相由两条支路组成,每条支路由两段绕组组成,即每相共4端绕组;接线端子通过与a相、b相和c相的绕组端不同的连接方式得到不同的功率模式。
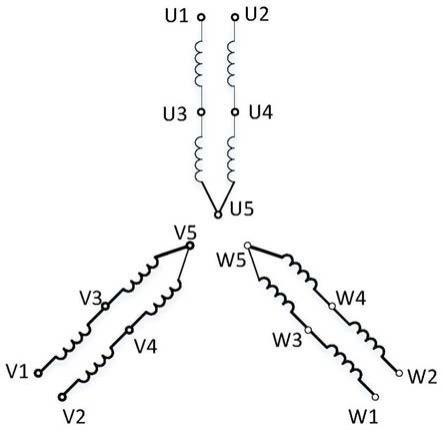
8.在上述的变功率三相电机,对于a相,记其4段绕组分别为l1、l2、l3和l4;l1、l3首部分别引出接线端子u1、u2;l1的尾部和l2的首部相接并引出接线端子u3,l3的尾部和l4的首部相接并引出接线端子u4;l3和l4的尾部相接并引出接线端子u5;b相、c相与a相相同,各引出5个接线端子,记为v1~v5和w1~w5。
9.一种变功率电机的控制方法,其特征是:包括:
10.低速低功率模式:三相电源分别接u1、v1、w1;u5、v5、w5接在一起;这种接法将相电压加在每相绕组的一条支路的2段绕组上,且磁极对数多,输出功率和转速低;
11.低速中功率模式:三相电源分别接u1、v1、w1;u1接u2、v1接v2、w1接w2;u5、v5、w5接在一起;这种接法将相电压加在每相绕组的两条并联支路的两段绕组上,且电机磁极数为4,输出功率中等,转速低;
12.高速中功率模式:三相电源分别接u3、v3、w3;u1接u5、v1接v5、w1接w5;u5、v5、w5接在一起;这种接法将相电压加在每相绕组的一条支路的一段绕组上,一条支路上的两段绕组并联,磁极数较少,输出功率中等,转速高;
13.高速高功率模式:三相电源分别接u3、v3、w3;u3接u4,v3接v4,w3接w4;u1、u2接u5,v1、v2接v5,w1、w2接w5;u5、v5、w5接在一起;这种接法将相电压加在每相绕组的两条支路的一段绕组上,一条支路上的两段绕组并联,磁极数少,输出功率和转速高。
14.本发明通过对绕组接线方式的更改实现功率模式的切换,不需要大电流半导体器件,无谐波污染;绕组结构简单,易于实现和维护。在中低功率和高功率模式中,定子绕组全部接入运行;另两种工作模式中,每相也有一支路绕组接入运行,绕组利用率高,实际工作效率高。
附图说明
15.图1是三相绕组结构示意图。
16.图2a是四种功率模式下绕组连接示意图(低速低功率)。
17.图2b是四种功率模式下绕组连接示意图(低速中功率)。
18.图2c是四种功率模式下绕组连接示意图(高速中功率)。
19.图2d是四种功率模式下绕组连接示意图(高速高功率)。
20.图3是定子绕组与交流接触器接线图。
21.图4a是各工作模式具体接线示意图体接线示意图(低速低功率)。
22.图4b是各工作模式具体接线示意图体接线示意图(低速中功率)。
23.图4c是各工作模式具体接线示意图体接线示意图(高速中功率)。
24.图4d是各工作模式具体接线示意图体接线示意图(高速高功率)。
25.图5是工作模式切换控制线路。
具体实施方式
26.以下结合附图对电机控制和运行的具体方式作简要阐述,本发明的实现方式还有很多,这里仅介绍较为常见和实用的一种方法。
27.首先介绍本发明涉及ide可变级变功率的笼式三相异步电动机结构,它由定子铁芯、转子铁芯、定子绕组、转子绕组、壳体组成。其铁芯结构等与普通电机类似,但定子绕组在运行过程中分段接入电机,段与段之间引出接线端。根据功率需求的不同,智能控制器调整接线端的通断,调整电动机中绕组的接线方式,从而实现软启动、软停止和实时跟踪负载调节功率等功能。
28.附图1为定子绕组结构示意图,定子绕组由三相组成,记为a相、b相和c相。每相有4段绕组(此处以4段为例,根据实际需求可以将每相绕组分成更多段,即对应多个磁极、多个极相组和多种功率模式)。以a相为例,记其4段绕组分别为l1、l2、l3和l4。l1、l3首部分别引出接线端子u1、u2;l1的尾部和l2的首部相接并引出接线端子u3,l3的尾部和l4的首部相接并引出接线端子u4;l3和l4的尾部相接并引出接线端子u5。b相、c相与a相相同,各引出5个接线端子,记为v1~v5和w1~w5。整个定子绕组由三相绕组组成,共有15个接线端子、12段绕组。这15个接线端子通过不同的连接方式可以得到4种功率模式,分别为低速低功率、低
速中功率、高速中功率和高速高功率模式。
29.每相绕组有两条并联支路,每条支路由两段绕组组成(如l1、l2为一支路,l3、l4为另一支路),在低功率下只接入一条支路,高功率下则接入两条支路以增强磁场。其中,每段绕组均包含由正向和负向线圈组成的一对极相组,这一对极相组串联构成这一段绕组。一条支路上的两段绕组共四个极相组对应电机中的4个磁极。在定子槽中,两条并联支路上位置对应的绕组的正段(或负段)实际上共同组成一个极相组(如l1和l3的正段组成一个极相组),在实际接入时,若只接入一条支路,则该极相组实际上只有一半接入工作,即并联支路将一个大极相组分成了两小部分。
30.低速低功率状态下:三相电源分别接u1、v1、w1;u5、v5、w5接在一起(相当于接中线)。这种接法将相电压加在每相绕组的一条支路的2段绕组上,电机另一条支路并不工作,且支路电压电流较低,对应功率输出也较低。此外,由于同一支路两段绕组串联,电流方向相同,电机磁极数为4,转速较低。因此,该模式适合转矩不大的低速运行工作。
31.低速中功率状态下:三相电源分别接u1、v1、w1;u1接u2、v1接v2、w1接w2,即两条并连支路均接入;u5、v5、w5接在一起。这种接法将相电压加在每相绕组的两条并联支路的2段绕组上,支路电压电流仍然较低,但是两条支路均接入电流,增强了磁场,输出功率相比一支路状态有较大提升。此外,同一支路两段绕组仍然串联,两段绕组电流方向仍然相反,电机磁极数为4,转速较低。因此,该模式适合转矩较大的低速运行工作。
32.高速中功率状态:三相电源分别接u3、v3、w3;u1接u5、v1接v5、w1接w5;u5、v5、w5接在一起。这种接法将相电压加在每相绕组的一条支路的一段绕组上。以a相为例,此时l1和l2两段绕组并联,另一条支路并不工作。因为相电压加在一条支路的一段绕组上(电阻较小),电流较大,输出功率中等。此外,由于同一支路两段绕组并联,电流方向相反,反映到电机定子槽中,两个磁极可以合并为一个极相组,即电机磁极数为2,对应转速较高。因此,该模式适合转矩不大的高速运行工作。
33.高速高功率状态:三相电源分别接u3、v3、w3;u3接u4,v3接v4,w3接w4;u1、u2接u5,v1、v2接v5,w1、w2接w5;u5、v5、w5接在一起。这种接法将相电压加在每相绕组的两条支路的一段绕组上(以u相为例,此时u1u3和u3u5两段绕组相当于并联)。因为相电压加在一条支路的一段绕组上(电阻较小),电流较大,且两条支路均接入工作,增强了磁场,输出功率在高速中功率模式基础上进一步增大。此外,由于同一支路两段绕组并联,电流方向相反,电机磁极数仍为2,对应转速较高。因此,该模式适合转矩较大的高速运行。
34.在实际应用中,由于具体功率需求,每相绕组的四小段绕组大小可以各不相同,对应的各种模式的功率也会变化。这种方案可以提供四种功率档位,满足了绝大多数电机功率切换以及转矩转速的需求,能够最大化适应实际使用,节约能源。
35.附图3和附图4为定子绕组与交流接触器触点连接图,绕组连接方式的切换一共需要5个交流接触器,分别为km1~km5,每个交流接触器有3对主触点和1对常开辅助触点(km3有1对常开和一对常闭)。其中km1单独控制低速低功率;km1、km2控制低速中功率;km3~km4控制高速中功率;km3~km6控制高速高功率。在实际接线中,三相电与u1之间接km1主触点,与u3之间接km3主触点;u1和u2之间接km2主触点,u1与u5之间接km4主触点;u3和u4之间接km5主触点。另外两相绕组接线与第一相相同。km1用于电机的启动,启动以后(km2
‑
km4线圈均不得电),自动工作在低功率模式。
36.附图5为电机切换工作状态的控制线路,其中k0
‑
k4为5个中间继电器,中间继电器的线圈接到plc的开关量输出端,由plc输出脉冲信号控制中间继电器的通断,从而控制各交流接触器的通断。k1和k0分别控制电机的启动和停止,k1得电以后,km1线圈得电形成自锁回路,此后k1失电。此时电机工作在低功率模式,定子绕组接线状态如附图4(a)。若要关闭电机,给k0输出脉冲信号,切断km1自锁电路即可关闭电机。sb为急停按钮。
37.中低功率切换:电机启动以后(km1始终得电),给k2输出脉冲信号使得km2线圈形成自锁电路,此后k2失电。绕组连接方式对应为中低功率模式,对应附图4(b)。若此时要切换工作模式,由于k1和km3(km3为交流机电器辅助触点)常闭触点的存在,切换低功率、中高功率和高功率时,km2的自锁回路会被切断。
38.中高功率切换:电机启动后,给k3输出脉冲信号,km3和km4自锁得电,同时切断km1自锁回路。此后k3失电,电机运行在中高功率模式,对应附图4(c)。若要切换回低功率和中低功率,由于k2常闭触点的存在,只需重新给k1或k2通电即可切断km3自锁回路。若要切换高功率,先给k2通电,再给k3通电,最后给k4通电,即可切换到高功率高功率切换:电机启动后,先给k2输出脉冲信号,km2自锁得电,此后k2失电,再给k3输出脉冲信号,km3和km4均得电,最后给k4输出脉冲信号,km5自锁得电。此时km2、km3、km4和km5均自锁得电。电机工作在高功率模式,对应附图4(d)。若要切换为前三档功率,只需给对应的中间继电器(k1、k2、k3)通电,后面的自锁回路都会切断,从而调整到相应功率。
39.智能控制器选用西门子plc s7
‑
1200,它由cpu模块和模拟量模块两部分组成。模拟量模块接收交流电流传感器输出的直流模拟信号。cpu模块的输入接口与触控板按钮组合、中间继电器的辅助触点相接,进行信号的采集。按钮组合由一些常开、常闭触点组合而成,包括启动、停止、多支路控制、得电授权、手动等按钮。cpu模块的输出接口主要通过中间继电器接到交流接触器控制电机运转。
40.本发明的上述实施例,仅仅是清楚地说明本发明所做的举例,但不用来限制本发明的专利保护范围,所有等同的技术方案也属于本发明的范畴,本发明的专利保护范围应由各项权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1