一种数码印花机驱动系统的制作方法
1.本发明涉及数码印花机技术领域,特别涉及一种数码印花机驱动系统。
背景技术:
2.数码印花机驱动系统包含喷头小车电机驱动和织物电机驱动。喷头小车电机驱动负责移动喷头到目标位置进行喷印,在横向完成往复运动,其速度控制性能对喷印质量具有重要影响。目前市面上的数码印花机多采用旋转伺服电机带滚珠丝杆的方式来驱动喷头小车运动。但是这种方式的缺点也很明显,比如:运行速度低、速度控制精度低、推力响应慢以及螺距误差带来的控制误差等。织物电机驱动负责移动织物到目标位置,在纵向完成承印物更新。传统的织物驱动电机通常采用步进电机,然而步进电机采用开环控制,响应慢,影响了印花机性能提升。近年来,也出现了采用永磁同步电机的织物电机驱动系统,但是传统的永磁同步电机额定转速大,速度采样精度低,需要加装减速器驱动织物输送模块,但减速器在使用过程中,存在漏油、振动、过热和噪声大等缺点,会降低设备的连续运转能力与可靠性。更进一步的,传统的印花机驱动系统需要两台驱动器、一台plc控制器以及一块运动控制板卡,不仅成本高,而且连线复杂。
技术实现要素:
3.本发明要解决的技术问题,在于提供一种数码印花机驱动系统,提高数码印花机驱动精度和响应速度,并进一步降低驱动系统的实现成本和布线难度。
4.为了解决上述技术问题,本发明实施例是这样实现的:
5.本发明实施例提供的一种数码印花机驱动系统,用于数码印花机,所述数码印花机包括织物输送模块和喷墨喷印模块,所述系统包括:
6.低速大扭矩电机,用于驱动所述织物输送模块;
7.直线电机,用于驱动所述喷墨喷印模块的喷头小车;
8.编码器采样模块,分别与所述低速大扭矩电机和直线电机连接,用于分别对喷头小车位置和织物位置进行采样;
9.电压电流采样模块,分别与所述低速大扭矩电机和直线电机连接,用于获取电压及电流采样值作为反馈输入;
10.电机驱动模块,分别与所述低速大扭矩电机、直线电机以及电源模块连接,用于根据控制信号对所述低速大扭矩电机和直线电机供电,以驱动低速大扭矩电机和直线电机运转;
11.fpga模块,与所述编码器采样模块、电压电流采样模块以及电机驱动模块连接,用于获取编码器采样模块以及电压电流采样模块的数据,然后计算生成控制信号;
12.cpu模块,与所述fpga模块连接,用于控制所述fpga模块,实现对两个电机的转速、位置控制以及故障处理。
13.进一步地,所述电机驱动模块为采用氮化镓器件的两电平逆变电路。
14.进一步地,所述电压电流采样模块采用δ
‑
σ模拟数字转换器。
15.进一步地,所述控制信号是由fpga根据两个电机的电流环控制算法分别生成的。
16.进一步地,所述cpu模块与fpga模块,采用zynq7000芯片实现。
17.本发明实施例中具有如下技术效果或优点:
18.1、基于直线电机的喷头小车直接驱动技术,简化机械机构、降低成本的同时,实现喷头小车高速运行,从而提高打印效率;基于低速大扭矩电机的织物电机驱动技术,无需减速机带动,提升带负载能力,提高响应速度和控制精度;
19.2、通过氮化镓(gan)两电平逆变电路实现电机驱动,gan固有的较低栅极和输出电容支持以兆赫兹级的开关频率运行,同时降低栅极和开关损耗,从而提高效率,减小驱动系统体积;
20.3、通过集成有所述cpu模块和fpga模块的zynq7000芯片,进一步降低驱动系统的实现成本和布线难度。
21.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
22.下面参照附图结合实施例对本发明作进一步的说明。
23.图1为现有技术中的数码印花机伺服驱动系统;
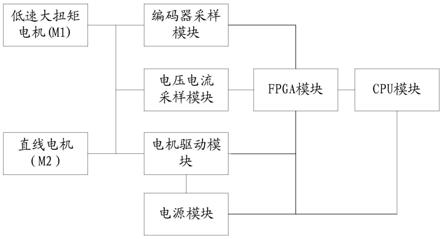
24.图2为本发明实施例中系统的框架示意图;
25.图3为本发明实施例中硬件结构示意图;
26.图4为本发明实施例中fpga模块的软件示意图。
具体实施方式
27.本发明实施例通过一种数码印花机驱动系统,提高数码印花机驱动精度和响应速度,并进一步降低驱动系统的实现成本和布线难度。
28.本发明实施例中的技术方案,总体思路如下:
29.数码印花机伺服驱动系统通过驱动织物输送单元和喷墨喷印单元交替运动,从而顺利完成印花工作。可见,伺服驱动系统对提高印花效率、精度具有重要意义。传统数码印花机伺服驱动系统见图1。本发明实施例采用直线电机替代传统的滚珠丝杠+旋转伺服电机驱动喷头小车;将步进电机替换为低速大扭矩电机,提高带载能力、速度响应快、控制精度高,并进一步将两个伺服驱动器、plc控制器以及控制板都集成到包含fpga模块和cpu模块的soc(system on chip,全可编程片上系统,比如型号为zynq7000的soc芯片)中,进一步降低驱动系统的实现成本和布线难度。
30.本发明实施例提供的一种数码印花机驱动系统,用于数码印花机,所述数码印花机包括织物输送模块和喷墨喷印模块,如图2所示,所述系统包括:
31.低速大扭矩电机(m1),用于驱动所述织物输送模块;
32.直线电机(m2),用于驱动所述喷墨喷印模块的喷头小车;直线电机是一种特殊永磁电机,不需要外加任何转换环节,依靠自身就能够进行往复直线运动。
33.编码器采样模块,分别与所述低速大扭矩电机和直线电机连接,用于分别对喷头小车位置和织物位置进行采样;
34.电压电流采样模块,分别与所述低速大扭矩电机和直线电机连接,用于获取电压及电流采样值作为控制系统的反馈输入;
35.电机驱动模块,分别与所述低速大扭矩电机、直线电机以及电源模块连接,用于根据控制信号对所述低速大扭矩电机和直线电机供电,以驱动低速大扭矩电机和直线电机运转;
36.fpga模块,与所述编码器采样模块、电压电流采样模块以及电机驱动模块连接,用于获取编码器采样模块以及电压电流采样模块的数据,然后计算生成控制信号;
37.cpu模块,与所述fpga模块连接,用于控制所述fpga模块,实现对两个电机的转速、位置控制以及故障处理。
38.系统的电源模块采用交流电源供电,通过整流电路整流后,直流母线电源经过电机驱动模块分别进入驱动喷头小车的直线电机和输运织物输送模块的低速大扭矩电机;高压母线电源经过基于反激变换器的宽输入多输出开关电源后转换成相互隔离的多路电源,分别为fpga模块、cpu模块以及电机驱动模块供电。增量式编码器的正交编码脉冲,通过光耦隔离后输入fpga模块,经过m/t法计算出喷头小车位置。23位多圈绝对值编码器,通过光耦隔离后输入fpga模块,计算出织物位置。基于直线电机的喷头小车直接驱动技术,简化机械机构、降低成本的同时,实现喷头小车高速运行,从而提高打印效率;基于低速大扭矩电机的织物电机直接驱动技术,无需减速机带动,提升带负载能力,提高响应速度和控制精度。
39.在一较佳实施例中,所述电机驱动模块为采用氮化镓器件的两电平逆变电路。传统的mosfe或者igbt的电机驱动器电路功率有损耗难以控制、散热大、重量大、体积大等缺点,基于硅的功率器件,当开关频率大于40khz时,开关损耗将大于传导损耗。不同于硅,氮化镓(gan)不需要体二极管,因而消除了反向恢复损耗,并进一步提高了效率、减少了开关节点振铃和emi。通过采用氮化镓(gan)器件的两电平逆变电路实现电机驱动,gan固有的较低栅极和输出电容支持以兆赫兹级的开关频率运行,同时降低栅极和开关损耗,从而提高效率,减小驱动系统体积。
40.所述电压电流采样模块采用δ
‑
σ模拟数字转换器,δ
‑
σadc使用了更高的采样速率,这个采样率是给定信号所需采样速率的许多倍,具有更好的抗混叠性能和更高的分辨率。因此,基于δ
‑
σadc(模拟数字转换器)的采样电路可以提供高精度的电压、电流采样值。
41.在一较佳实施例中,如图3所示,所述cpu模块与fpga模块,采用zynq7000芯片集成实现。基于zynq 7000soc的数码印花机驱控一体化控制器设计,集成了cpu模块和fpga模块,从而简化连线,使系统更紧凑,降低成本。
42.所述控制信号是由fpga根据两个电机的电流环控制算法分别生成的,如图4所示,两个电机的电流环控制算法相互独立,可以实现灵活替换更新算法,便于进行算法验证研究。
43.虽然以上描述了本发明的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本发明的范围的限定,熟悉本
领域的技术人员在依照本发明的精神所作的等效的修饰以及变化,都应当涵盖在本发明的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1