采用脉振正弦电压扫描的永磁同步电机初始位置检测方法与流程
1.本发明涉及变频器及永磁同步电机驱动控制领域,尤其涉及一种采用脉振正弦电压扫描的初始位置辨识方法,该方法无需光电编码器或者旋转变压器等位置传感器,对于凸极式或隐极式永磁同步电机均可适用。
背景技术:
2.转子初始位置检测对永磁同步电机的成功平稳起动非常重要,如果转子初始位置检测错误,会降低电机的起动转矩,甚至在起动时会出现电机反转现象。大部分无位置传感器的转子初始位置检测都是基于永磁同步电机的凸极特性,内置式永磁同步电机转子本身具有凸极结构,表现出结构性凸极,也称为凸极式永磁同步电机;表贴式永磁同步电机的非线性磁路饱和效应会形成“小凸极”特性,表现出饱和性凸极,此类电机也称为隐极式永磁同步电机。
3.传统的高频脉振正弦电压注入法利用转子永磁体凸极特性,在电机的同步旋转坐标系d轴注入高频正弦电压信号,由于d、q轴电感的差异,会在电机定子侧产生包含转子磁极位置信息的高频电流响应信号,对该高频电流响应信号进行合适地信号处理,可在180
°
范围内预估转子磁极位置角,通常再配合相应的磁极极性判断方法,即可准确得到磁极位置。该方法具有较高的辨识精度,并且可应用于隐极式永磁同步电机,但是其转子磁极位置信息解析过程复杂,一般需要设计滤波器、锁相环或龙伯格观测器,带来了相位滞后和电机参数敏感等问题。
技术实现要素:
4.针对现有技术的缺陷,本发明提供一种采用脉振正弦电压扫描的永磁同步电机初始位置检测方法,通过向不同的角度注入脉振正弦电压,比较其响应的电流峰峰值大小即可直接判断出转子位置所在区间和磁极极性。该方案不依赖电机参数,无需复杂的位置信息解析和特殊的极性判断过程,并对凸极式电机和隐极式电机均可适用。
5.为了解决所述技术问题,本发明采用的技术方案是:一种采用脉振正弦电压扫描的永磁同步电机初始位置检测方法,包括以下步骤:
6.s01)、在虚拟同步旋转坐标系的d轴注入给定频率和幅值的脉振正弦电压信号,q轴注入电压为0,即注入虚拟d
‑
q轴的电压表达式为:
[0007][0008]
其中v
inj
为注入电压信号的幅值,f为注入电压信号的频率,t为时间;
[0009]
s02)、定义永磁同步电机的定子a相绕组轴线作为位置角度的参考零角度,定义虚拟同步旋转坐标系d轴角度为旋转角度θ
x
,并设置初始旋转角度θ1=0,其中x为正整数,表示旋转角度的编号;
[0010]
s03)、以θ
x
作为变换角度,对注入的电压信号进行坐标变换,将虚拟同步旋转d
‑
q坐标系变换到静止α
‑
β坐标系,并进行svpwm调制,生成脉冲信号控制功率器件的开关;
[0011]
s04)、采样永磁同步电机的三相定子电流,并以角度θ
x
进行坐标变换到虚拟同步旋转坐标系d
‑
q坐标系,获得虚拟d轴电流i
d
;
[0012]
定义磁极位置判断函数j
x
为i
d
波峰与波谷模值差异,即
[0013]
j
x
=f(θ
x
)=|i
d_max
|
‑
|i
d_min
|
ꢀꢀꢀ
(2),
[0014]
其中,f为映射函数,j
x
的值与旋转角度θ
x
是一一对应的;
[0015]
s05)、改变虚拟d轴的旋转角度θ
x
,分别取θ
x
∈{0,n,2n,
…
,180
‑
n},n=180/x表示每次虚拟角度改变值的大小,令θ
x
在0~180
°
范围内以角度n为步长扫描变化,θ
x
每改变一次,重复步骤s02至步骤s04;
[0016]
s06)、当θ
x
角度扫描变化完成后,记录每个角度下的j
x
值,并比较所有j
x
的模值,其最大值|j
opt
|的表达式为:
[0017]
|j
opt
|=max(|j1|,
…
,|j
x
|)
ꢀꢀꢀꢀꢀꢀ
(3),
[0018]
s07)、求得的j
opt
包含了转子位置信息,该值对应的角度值θ
opt
最接近转子磁极正方向或者反方向,θ
opt
的表达式为:
[0019]
θ
opt
=f
‑1(j
opt
)
ꢀꢀꢀꢀꢀ
(4),
[0020]
通过判断j
opt
的符号,得到磁极极性,其表达式为:
[0021][0022]
式中,pole表示磁极极性,0代表磁极正方向,1代表磁极反方向;sign为取符号函数;
[0023]
s08)、转子初始位置角最终的辨识值表达式为
[0024][0025]
理论上,初始位置角度辨识值的最大误差为n/2。因此n的取值范围决定了转子初始位置角最终的辨识值的误差大小,如n=4时,最辨识结果的最大误差为2
°
,一般情况下,可取4≤n≤10。
[0026]
进一步的,取注入电压信号的频率f为0.5~2khz。
[0027]
本发明的有益效果:本发明提供了一种永磁同步电机初始位置辨识方法,该方案利用永磁同步电机的磁路饱和效应,通过注入一系列不同角度的脉振正弦电压,检测其响应电流并作简单的代数计算与比较即可得到初始位置估计值。与其他高频脉振电压注入法相比,该方案省去了复杂的滤波器和锁相环,并且在位置辨识过程中可以直接得到磁极极性,无需额外的极性判断环节,具有算法简单、稳定性强、适用范围广等优点。本发明保持了高频脉振电压注入法的优点,对于凸极式电机和隐极式永磁同步电机均可适用。
附图说明
[0028]
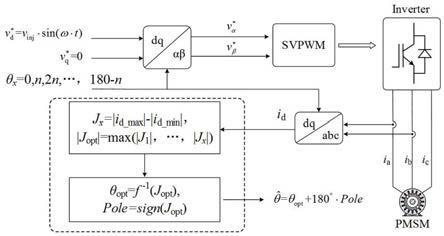
图1为本发明采用脉振正弦电压扫描的永磁同步电机初始位置辨识控制框图;
[0029]
图2为理想情况和磁路饱和时的i
d
电流响应波形;
[0030]
图3为永磁同步电机矢量关系图。
具体实施方式
[0031]
下面结合附图和具体实施例对本发明作进一步的说明。
[0032]
实施例1
[0033]
本实施例公开一种采用脉振正弦电压扫描的永磁同步电机初始位置检测方法,如图1所示,包括以下步骤:
[0034]
s01)、在虚拟同步旋转坐标系的d轴注入给定频率和幅值的脉振正弦电压信号,q轴注入电压为0,即注入虚拟d
‑
q轴的电压表达式为:
[0035][0036]
其中v
inj
为注入电压信号的幅值,f为注入电压信号的频率,t为时间;通常情况下,频率f远大于电机额定运行频率。
[0037]
s02)、定义永磁同步电机的定子a相绕组轴线作为位置角度的参考零角度,定义虚拟同步旋转坐标系d轴角度为旋转角度θ
x
,即θ
x
=2πf
·
t,并设置初始旋转角度θ1=0,其中x为正整数,表示旋转角度的编号;
[0038]
s03)、以θ
x
作为变换角度,对注入的电压信号进行坐标变换,将虚拟同步旋转d
‑
q坐标系变换到静止α
‑
β坐标系,并进行svpwm调制,生成脉冲信号控制功率器件的开关;
[0039]
s04)、采样永磁同步电机的三相定子电流,并以角度θ
x
进行坐标变换到虚拟同步旋转坐标系d
‑
q坐标系,获得虚拟d轴电流i
d
;
[0040]
如图2所示,理想情况下,在虚拟d轴上注入的电压为正弦电压,其响应的电流i
d
也应该是正弦波形,但由于永磁同步电机的磁饱和效应会引起d轴电感的变化,会导致i
d
电流波形发生畸变。如图3所示,当定子电流i
s
与磁极位置φ
f
的夹角小于90
°
时,定子电流的励磁分量与转子永磁体磁链方向一致,产生增磁效果导致d轴电感降低;反之,当定子电流i
s
与磁极位置φ
f
的夹角大于90
°
时,定子电流的励磁分量与转子永磁体磁链方向相反,产生去磁效果导致d轴电感增大;定子电流与磁极位置的夹角越接近0
°
或180
°
,增磁或去磁效果越明显。
[0041]
在这种饱和效应下,电流i
d
波形不再是严格的正弦波,可以利用其波峰i
d_max
和波谷i
d_min
的模值差异来判断磁极位置。此时i
d
波峰与波谷模值差异的表达式为:
[0042]
j
x
=f(θ
x
)=|i
d_max
|
‑
|i
d_min
|
ꢀꢀꢀ
(2),
[0043]
其中,f为映射函数,j
x
的值与旋转角度θ
x
是一一对应的;
[0044]
s05)、改变虚拟d轴的旋转角度θ
x
,分别取θ
x
∈{0,n,2n,
…
,180
‑
n},n=180/x表示每次虚拟角度改变值的大小,令θ
x
在0~180
°
范围内以角度n为步长扫描变化,θ
x
每改变一次,重复步骤s02至步骤s04;
[0045]
s06)、当θ
x
角度扫描变化完成后,记录每个角度下的j
x
值,并比较所有j
x
的模值,其最大值|j
opt
|的表达式为:
[0046]
|j
opt
|=max(|j1|,
…
,|j
x
|)
ꢀꢀꢀꢀꢀꢀ
(3),
[0047]
s07)、求得的j
opt
包含了转子位置信息,该值对应的角度值θ
opt
最接近转子磁极正方向(n极)或者反方向(s极),θ
opt
的表达式为:
[0048]
θ
opt
=f
‑1(j
opt
)
ꢀꢀꢀꢀꢀ
(4),
[0049]
通过判断j
opt
的符号,得到磁极极性,其表达式为:
[0050][0051]
式中,pole表示磁极极性,0代表磁极正方向,1代表磁极反方向;sign为取符号函数;
[0052]
s08)、转子初始位置角最终的辨识值表达式为:
[0053][0054]
步骤s01中,频率f远大于电机额定运行频率。本实施例中,取注入电压信号的频率f为0.5~2khz。
[0055]
本实施例中,n取值越小,位置辨识的精度越高,但辨识过程时间越长。因为n=180/x,所以规定x的取值范围为:18≤x≤45,从而确定n的取值为4≤n≤10。
[0056]
本实施例所述方法利用永磁同步电机的磁路饱和效应,通过注入一系列不同角度的脉振正弦电压,检测其响应电流并作简单的代数计算与比较即可得到初始位置估计值。与其他高频脉振电压注入法相比,该方案省去了复杂的滤波器和锁相环,并且在位置辨识过程中可以直接得到磁极极性,无需额外的极性判断环节,具有算法简单、稳定性强、适用范围广等优点。本方法保持了高频脉振电压注入法的优点,对于凸极式电机和隐极式永磁同步电机均可适用。
[0057]
以上描述的仅是本发明的基本原理和优选实施例,本领域技术人员根据本发明做出的改进和替换,属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1