马达装置的制作方法
马达装置
1.本技术主张基于2020年10月7日申请的日本专利申请第2020-169887号的优先权。该日本技术的全部内容通过参考援用于本说明书中。
技术领域
2.本发明涉及一种马达装置。
背景技术:
3.专利文献1公开了一种作为制动器组装有盘式制动器的马达装置。盘式制动器通常具备:制动器转子,与马达轴一起旋转;及制动蹄片,被推压到制动器转子上从而对马达轴进行制动。
4.专利文献1:日本特开平10-225064号公报
5.在作为制动器使用盘式制动器时,为了对马达轴的旋转进行制动,需要相对于制动蹄片沿轴向配置制动器转子。因此,存在制动器整体的轴向尺寸变大的倾向。本发明人从使制动器的轴向尺寸小型化的观点出发,发现了以往技术具有改进的余地。
技术实现要素:
6.本发明的目的之一在于,提供一种能够使制动器的轴向尺寸小型化的技术。
7.本发明的马达装置具备:马达,使马达轴旋转;制动器,对所述马达轴的旋转进行制动;及制动器壳体,容纳所述制动器,其中,所述制动器具备:制动蹄片;及推压机构,朝向所述马达轴的外周推压所述制动蹄片,在所述推压机构朝向所述马达轴的外周推压了所述制动蹄片时,所述制动蹄片随着所述马达轴的旋转朝向所述马达轴的旋转方向移动,并且所述制动蹄片夹入所述马达轴与所述制动器壳体之间,从而对所述马达轴的旋转进行制动。
8.根据本发明,能够使制动器的轴向尺寸小型化。
附图说明
9.图1是第1实施方式的马达装置的侧视剖视图。
10.图2是表示图1的a-a截面的一部分的图。
11.图3是图2的放大图。
12.图4是第1实施方式的制动蹄片的立体图。
13.图5是表示第1实施方式的马达装置中的制动蹄片从制动解除位置朝向制动位置移动的中途状态的放大图。
14.图6是表示第1实施方式的马达装置中的制动蹄片位于制动位置的状态的放大图。
15.图7是表示第1实施方式的马达装置中的制动蹄片欲从制动位置朝向制动解除位置移动的中途状态的放大图。
16.图8是表示第2实施方式的马达装置中的制动蹄片位于制动解除位置的状态的示
意图。
17.图9是表示第2实施方式的马达装置中的制动蹄片位于制动位置的状态的示意图。
18.图10是图9的范围a的放大图。
19.图11是从与图3相同的视角观察第3实施方式的马达装置时的示意图。
20.图12是表示第4实施方式的马达装置中的解除了基于制动蹄片的制动的状态的示意图。
21.图13是表示第4实施方式的马达装置中的通过制动蹄片进行制动的状态的示意图。
22.图中:10-马达装置,12-工业用机械手,12a-关节部,14-马达轴,16-马达,18-制动器,20-壳体,22-减速装置,34-制动器壳体,56a、56b-楔状空间,58-制动蹄片,60-推压机构,68a、68b-被夹部,70a-第1制动抵接面,70b-第2制动抵接面,72a-被抵接面,74-非制动抵接面,76-推压部件,100a、100b-施力部件,130a、130b-滚柱。
具体实施方式
23.以下,对实施方式进行说明。并且,对相同的构成要件标注相同的符号,并省略重复说明。在各附图中,为了便于说明,适当省略、放大或缩小表示构成要件。附图根据符号的方向进行观察。
24.(第1实施方式)
25.参考图1。本实施方式的马达装置10组装于工业用机械手12的关节部12a。本实施方式的工业用机械手12为与人协作一起工作的协作机器人。
26.本实施方式的马达装置10主要具备马达轴14、马达16、制动器18、壳体20及减速装置22。
27.马达轴14用于将马达16所产生的旋转动力传递至被驱动部件(未图示)。本实施方式的被驱动部件是工业用机械手12的经由关节部12a连结于第1臂的第2臂。以下,将沿马达轴14的旋转中心线cl的方向称为轴向x,将以该旋转中心线cl为中心的圆的圆周方向及半径方向分别称为“周向”及“径向”。另外,将轴向x上的一侧(图1的左侧)称为输出侧,将轴向x上的另一侧(图1的右侧)称为输出相反侧。
28.马达16能够使马达轴14旋转。马达16具备:定子24,固定于马达壳体32(在后面叙述);及转子26,与马达轴14一体地旋转。本实施方式的马达16是伺服马达,其具备控制马达16的旋转的马达控制部28(例如,马达致动器等)及检测马达轴14的旋转相位的相位检测部30(例如,编码器等)。
29.制动器18能够对马达轴14的旋转进行制动。制动器18相对于马达16配置于输出侧。制动器18配置于马达16与减速装置22之间。关于制动器18具体结构,将在后面进行叙述。
30.壳体20被配置于马达装置10的外部的支承部件(未图示)支承。支承部件例如是工业用机械手12的第1臂。壳体20具备容纳马达16的马达壳体32及容纳制动器18的制动器壳体34。本实施方式的制动器壳体34构成为与马达壳体32相同的部件的一部分。除此之外,制动器壳体34也可以与马达壳体32分体构成。制动器壳体34经由第1轴承36将马达轴14支承为能够旋转。
31.减速装置22对马达轴14的旋转进行减速并将减速后的旋转输出至被驱动部件。减速装置22具备:减速机构38,对马达轴14的旋转进行减速;外壳40,容纳减速机构38;及输出部件42,将被减速机构38减速之后的旋转动力输出至被驱动部件。
32.本实施方式的减速机构38是使与内齿部件44啮合的外齿轮46挠曲变形并且移动从而使外齿轮46自转并将其自转成分传递至输出部件42的挠曲啮合式减速机构。这种减速机构38本身是公知的,因此在这里不再进行详细说明。
33.外壳40通过螺栓等固定于制动器壳体34,从而与制动器壳体34成为一体。本实施方式的输出部件42是相对于减速机构38配置于输出侧的轮架48。减速装置22还具备配置于轮架48与马达轴14之间的第2轴承50。
34.接下来,对制动器18的相关特征进行说明。参考图2~图4。以下,为了便于说明,省略制动器壳体34及制动蹄片58的阴影线。
35.制动器壳体34具备容纳制动蹄片58(在后面叙述)的蹄片容纳部52。蹄片容纳部52相对于马达轴14设置于径向外侧。蹄片容纳部52具备在蹄片容纳部52的内周面朝向径向外侧凹陷设置的容纳凹部54。
36.在蹄片容纳部52中,在制动器壳体34与马达轴14之间形成楔状空间56a、56b。楔状空间56a、56b的间隔设置成随着朝向周向上的一侧变窄。本说明书中的“楔状空间的间隔”是指:制动器壳体34与马达轴14之间的径向上的间隔。楔状空间56a、56b包括:第1楔状空间56a,相对于容纳凹部54设置于周向上的一侧(图中的逆时针方向侧);及第2楔状空间56b,相对于容纳凹部54设置于周向上的另一侧(图中的顺时针方向侧)。
37.制动器18具备:制动蹄片58;及推压机构60,朝向马达轴14的外周推压制动蹄片58。
38.本实施方式的制动蹄片58具备:主体部62,推压向马达轴14的外周;及突出部64,从主体部62朝向径向外侧突出。制动蹄片58的突出部64具备从主体部62的外周面的轴向两侧的边缘部突出的一对突出部64。
39.主体部62具备被推压到马达轴14的外周而对马达轴14进行制动的制动面66。制动面66在径向上与马达轴14的外周对置。本实施方式的制动面66呈与马达轴14的外周面所呈的圆形相匹配的圆弧状。也可以说制动面66是能够与马达轴14的外周面面接触的形状。
40.主体部62具备配置于上述楔状空间56a、56b的被夹部68a、68b。本实施方式的被夹部68a、68b包括:第1被夹部68a,配置于第1楔状空间56a;及第2被夹部68b,配置于第2楔状空间56b。本实施方式的被夹部68a、68b呈其径向尺寸随着朝向楔状空间56a、56b的间隔变窄的一侧而变薄的楔状。
41.被夹部68a、68b具备进行制动时与制动器壳体34抵接的制动抵接面70a、70b。制动抵接面70a、70b在径向上与制动器壳体34的蹄片容纳部52对置。制动抵接面70a、70b分别设置于一对被夹部68a、68b上。制动抵接面70a、70b为凸曲面状。制动抵接面70a、70b包括:第1制动抵接面70a,设置于楔状空间56a、56b内的间隔变窄的一侧;及第2制动抵接面70b,设置于楔状空间56a、56b内的间隔变宽的一侧。
42.制动器壳体34的蹄片容纳部52具备与制动蹄片58的制动抵接面70a、70b抵接的被抵接面72a、72b。被抵接面72a、72b包括:第1被抵接面72a,设置于楔状空间56a、56b内的间隔变窄的一侧;及第2被抵接面72b,设置于楔状空间56a、56b内的间隔变宽的一侧。被抵接
面72a、72b为曲率半径比制动抵接面70a、70b所呈曲面的曲率半径更大的形状。为了满足该条件,本实施方式的被抵接面72a、72b呈曲率半径无限大的平面状。除此之外,为了满足该条件,被抵接面72a、72b也可以呈凹曲面状。
43.制动蹄片58具备非制动时与制动器壳体34抵接的非制动抵接面74。在此,“非制动时”是指:解除制动蹄片58对马达轴14的制动时。为了满足该条件,制动蹄片58至少在使制动蹄片58向推压部件76的退避方向db2(在后面叙述)移动的情况下与制动器壳体34抵接即可。非制动抵接面74分别设置于一对被夹部68a、68b上。非制动抵接面74设置于第1制动抵接面70a与第2制动抵接面70b之间。
44.非制动抵接面74为非制动时能够与制动器壳体34面接触的形状。为了满足该条件,非制动抵接面74呈与制动器壳体34的被抵接面72b相同的平面状。除此之外,为了满足该条件,在被抵接面72b呈凹曲面状时,非制动抵接面74可以呈曲率与被抵接面72b所呈曲面的曲率相同的凸曲面状。
45.推压机构60具备:推压部件76,相对于马达轴14能够进退;非电动驱动部78,不使用电力而驱动推压部件76向第1驱动方向da1移动;及电动驱动部80,使用电力而驱动推压部件76向第2驱动方向da2移动。推压机构60的至少一部分配置于制动器壳体34的容纳凹部54内。在本实施方式中,推压部件76、电动驱动部80及非电动驱动部78均容纳于容纳凹部54内。
46.本实施方式的推压部件76为电动驱动部80的杆84(在后面叙述)。推压部件76相对于马达轴14配置于径向外侧。制动蹄片58经由定位销82连结于推压部件76,从而能够与推压部件76一同沿进退方向db进退移动。定位销82插穿于形成在制动蹄片58的突出部64的销孔64a中。销孔64a为沿周向延伸的长孔,其允许制动蹄片58相对于定位销82在周向上的相对移动。由此,制动蹄片58经由定位销82以相对于推压部件76能够沿周向移动的方式连结于推压部件76。
47.推压部件76的进退方向db为径向。详细而言,推压部件76的前进方向db1为径向上的朝内方向,推压部件76的退避方向db2为径向上的朝外方向。若推压部件76相对于马达轴14朝向前进方向db1移动,则能够朝向马达轴14的外周推压制动蹄片58。
48.非电动驱动部78的第1驱动方向da1与电动驱动部80的第2驱动方向da2在进退方向db上彼此为反方向。在本实施方式中,第1驱动方向da1为前进方向db1,第2驱动方向da2为退避方向db2。
49.本实施方式的非电动驱动部78是基于弹性变形的复原力而驱动推压部件76的弹性部件。由该弹性部件构成的非电动驱动部78的具体例为压缩弹簧。非电动驱动部78配置在后述的致动器外壳90内并且配置于致动器外壳90与杆84之间。
50.本实施方式的电动驱动部80为螺线管致动器(线性致动器)。该电动驱动部80具备:能够进退移动的杆84;线圈86,生成使杆84移动的磁力;及致动器壳体88,支承杆84及线圈86。致动器壳体88具备:致动器外壳90,容纳杆84;及框架92,配置于致动器外壳90的外部并且支承致动器外壳90。
51.电动驱动部80在未图示的制动器控制部的控制下切换对其自身线圈86的通电与否。制动器控制部为组合cpu、rom、ram等硬件及软件而成的计算机。
52.非电动驱动部78不管电动驱动部80是否通电均向推压部件76赋予前进方向db1
(第1驱动方向da1)的第1驱动力fa。电动驱动部80在电动驱动部80的线圈86处于通电状态时向推压部件76赋予退避方向db2(第2驱动方向da2)的第2驱动力fb。第1驱动力fa作为朝向前进方向db1推压推压部件76的力量而发挥作用,第2驱动力fb作为使推压部件76朝向退避方向db2返回的力量而发挥作用。电动驱动部80的第2驱动力fb设定为比非电动驱动部78的第1驱动力fa更大。其结果,在电动驱动部80处于通电状态时,第2驱动力fb抵抗第1驱动力fa而向退避方向db2(第2驱动方向da2)驱动推压部件76。与之相对,在电动驱动部80处于未通电状态时,第2驱动力fb被解除,第1驱动力fa向前进方向db1(第1驱动方向da1)驱动推压部件76。
53.接着,对与上述制动器18相关的马达装置10的动作进行说明。
54.参考图3及图6。在图3及图6中同时示出了各图的局部放大图。推压机构60能够使制动蹄片58在制动位置pa(参考图6)与制动解除位置pb(参考图3)之间移动。当制动蹄片58位于制动位置pa时,对马达轴14的旋转进行制动,当位于制动解除位置pb时,解除对马达轴14的制动。在制动蹄片58配置于制动解除位置pb时,在制动蹄片58与马达轴14之间形成非常小的空隙96。该空隙96例如为0.3mm以下的大小。
55.首先,对通过制动器18对马达轴14的旋转进行制动时的动作进行说明。参考图3。在对马达轴14的旋转进行制动时,推压机构60驱动位于制动解除位置pb的制动蹄片58朝向前进方向db1移动。为了满足该条件,本实施方式的推压机构60在制动器控制部94的控制下解除对电动驱动部80的通电,由此使推压部件76朝向前进方向db1移动。由此,使制动蹄片58与推压部件76一同朝向前进方向db1移动,通过推压部件76朝向马达轴14的外周推压制动蹄片58。
56.参考图5。若向马达轴14的外周推压制动蹄片58,则通过制动蹄片58与马达轴14之间的摩擦,制动蹄片58随着马达轴14的旋转朝向要制动的马达轴14的旋转方向dc(以下,简称为制动旋转方向dc)移动。由此,制动旋转方向dc侧的制动蹄片58的被夹部68a在配置有被夹部68a的楔状空间56a内朝向间隔变窄的一侧(图中逆时针方向)移动。
57.在制动蹄片58随着马达轴14移动的情况下,制动蹄片58的第1制动抵接面70a先与制动器壳体34抵接。此时,第1制动抵接面70a与制动器壳体34的第1被抵接面72a抵接。另一方面,此时,制动蹄片58的第2制动抵接面70b未与制动器壳体34抵接。
58.参考图6。之后,制动蹄片58随着马达轴14进一步朝向制动旋转方向dc移动。其结果,第2制动抵接面70b在制动器壳体34与第1制动抵接面70a抵接之后与制动器壳体34抵接。此时,第2制动抵接面70b与制动器壳体34的第2被抵接面72b抵接。此时,第1制动抵接面70a维持与制动器壳体34抵接的状态。
59.其结果,制动蹄片58配置于夹入马达轴14与制动器壳体34之间的制动位置pa。此时,位于制动旋转方向dc侧的制动蹄片58的被夹部68a在配置有被夹部68a的楔状空间56a内夹入马达轴14与制动器壳体34之间。由此,通过制动蹄片58,能够对马达轴14的旋转进行制动。也可以说,在进行制动时,制动蹄片58在楔状空间56a、56b内夹入马达轴14与制动器壳体34之间。
60.推压机构60向制动蹄片58赋予的推压力设定为,即使在马达轴14以所预料的最大转速进行旋转的情况下也能够维持向马达轴14的外周推压制动蹄片58的状态的大小。在本实施方式中,非电动驱动部78的第1驱动力fa(参考图2)的大小设定成满足该条件。
61.接着,对解除制动器18对马达轴14的制动时的动作进行说明。
62.在解除对马达轴14的制动时,推压机构60朝向退避方向db2驱动位于制动位置pa的制动蹄片58。为了满足该条件,本实施方式的推压机构60在制动器控制部94的控制下对电动驱动部80进行通电,从而朝向退避方向db2驱动推压部件76。本实施方式的制动蹄片58连结于推压部件76,因此其能够与推压部件76一同朝向退避方向db2移动。
63.参考图7。若制动蹄片58欲向退避方向db2移动,则制动蹄片58的非制动抵接面74与制动器壳体34的被抵接面72a、72b抵接,由此制动蹄片58引导向制动旋转方向dc的相反方向dd(以下,简称为反转方向dd)。该“反转方向dd”是周向上的位于制动旋转方向dc侧的楔状空间56a的间隔变宽的一侧(图中的顺时针方向)。其结果,制动蹄片58随着朝向反转方向dd的移动而朝向径向外侧(退避方向db2)移动,从而从制动位置pa移动至制动解除位置pb(参考图3)。
64.制动蹄片58以推压机构60赋予第2驱动力fb的状态保持在制动解除位置pb。此时,分别设置于制动蹄片58的一对被夹部68a、68b上的非制动抵接面74成为与制动器壳体34的被抵接面72a、72b面接触的状态。
65.至此,对马达轴14的制动旋转方向da为周向上的一侧(图中的逆时针方向)时的马达轴14的制动相关动作进行了说明。此时,如上述,制动蹄片58随着马达轴14朝向周向上的一侧移动。此时,制动蹄片58的第1被夹部68a在第1楔状空间56a内夹入马达轴14与制动器壳体34之间,从而对马达轴14进行制动。与之相对,还可以考虑马达轴14的制动旋转方向db为周向上的另一侧(图中的顺时针方向)的情况。此时,制动蹄片58随着马达轴14朝向周向上的另一侧移动。此时,制动蹄片58的第2被夹部68b在第2楔状空间56b内夹入马达轴14与制动器壳体34之间,从而对马达轴14进行制动。此时,与马达轴14的制动旋转方向da为周向上的一侧的情况相比,只有在对马达轴14进行制动时的制动蹄片58的移动方向在周向上彼此反向的这一点上有所不同。
66.另外,在解除对马达轴14的制动时,有时会存在制动蹄片58在楔状空间56a、56b强力咬入制动器壳体34与马达轴14之间的情况。此时,可以通过马达控制部28使马达轴14朝向制动旋转方向dc的相反方向dd(反转方向dd)旋转。由此,制动蹄片58的咬入被解除,通过电动驱动部80容易使制动蹄片58朝向退避方向db2移动。
67.如以上说明,推压机构60使制动蹄片58与推压部件76一同朝向前进方向db1移动,从而能够使制动蹄片58从制动解除位置pb朝向制动位置pa移动。另一方面,推压机构60使推压部件76朝向退避方向db2移动,从而能够使制动蹄片58从制动位置pa朝向制动解除位置pb移动。
68.参考图2。本实施方式的推压机构60在电动驱动部80未赋予第2驱动力fb的状态下利用基于非电动驱动部78的第1驱动力fa并利用制动蹄片58对马达轴14进行制动。另一方面,推压机构60在电动驱动部80赋予第2驱动力fb的状态下解除制动蹄片58对马达轴14的制动。换言之,推压机构60仅在对电动驱动部80供给电力时才能切换制动蹄片58对马达轴14的制动的有无。另一方面,推压机构60在不对电动驱动部80供给电力时无法切换制动蹄片58对马达轴14的制动,通过制动蹄片58能够对马达轴14持续进行制动。
69.接着,对上述马达装置10的效果进行说明。
70.(a)根据本实施方式的马达装置,推压机构60朝向马达轴14的外周推压制动蹄片
58,由此能够对马达轴14的旋转进行制动。由此,在对马达轴14的旋转进行制动时,不需要像盘式制动器那样的盘形转子,因此相应地能够将制动器18的轴向尺寸小型化。
71.除此之外,由于不需要盘形转子,因此相应地能够实现制动器18的低成本化及轻型化、甚至能够实现马达轴14的低惯性化。
72.另外,即使在利用制动蹄片58对马达轴14的旋转进行制动时马达轴14还在旋转,也能够通过制动器壳体34、马达轴14及制动蹄片58等的弹性变形来吸收作用于制动蹄片58等的制动力或反作用力。由此,局部性的大荷载难以施加到制动蹄片58或其周边结构,能够获得良好的耐久性。
73.另外,通过使推压部件76沿径向进退移动,能够对马达轴14的旋转进行制动。由此,无需像盘式制动器那样确保用于使推压部件76沿轴向x进退移动的空间,因而相应地能够将制动器18的轴向尺寸小型化。
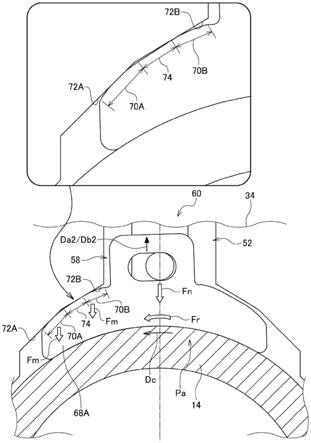
74.(b)在进行制动时,制动蹄片58在楔状空间56a、56b内夹入马达轴14与制动器壳体34之间。由此,如下所述,能够对马达轴14赋予强大的制动力。
75.参考图6。将在制动蹄片58与马达轴14之间作用于制动蹄片58的摩擦力设为fr[n],将推压机构60赋予给制动蹄片58的推压力(以下,称为主推压力)设为fn[n],将动摩擦系数设为μ[-]。它们之间成立下式(1)的关系。
[0076]
fr=μ
×
fn
ꢀꢀꢀꢀꢀꢀꢀ
(1)
[0077]
制动蹄片58的被夹部68a夹入位于制动旋转方向dc侧的楔状空间56a内。由此,通过制动器壳体34的蹄片容纳部52(被抵接面72a、72b),作用于制动蹄片58的摩擦力fr的一部分转换成朝向马达轴14的外周推压制动蹄片58的辅助推压力fm。其结果,除了主推压力fn之外还存在辅助推压力fm,因此相应地能够加大基于制动蹄片58的制动力。由此,通过制动蹄片58,能够对马达轴14赋予强大的制动力。
[0078]
该辅助推压力fm成为相对于摩擦力fr具有正相关关系的大小。同样,如式(1)所示,摩擦力fr也成为相对于主推压力fn具有正相关关系的大小。由此,若加大主推压力fn,则辅助推压力fm也能够随之有效地增大。根据这种关系,能够通过制动蹄片58对马达轴14赋予非常强大的制动力。由于能够利用这种辅助推压力fm确保强大的制动力,因此能够确保制动力的基础上还能够实现电动驱动部80的低耗电化。
[0079]
另外,制动蹄片58优选相对于马达轴14配置于铅垂方向上侧。由此,能够加大相当于制动蹄片58的自重的式(1)的动摩擦力fr。
[0080]
制动蹄片58的制动抵接面70a、70b呈凸曲面状,制动器壳体34的被抵接面72a、72b为曲率半径比制动抵接面70a、70b的曲率半径更大的形状。由此,相比制动抵接面70a、70b的曲率半径与被抵接面72a、72b的曲率半径相同的情况,能够减小制动器壳体34的被抵接面72a、72b与制动蹄片58的制动抵接面70a、70b之间的抵接面积。该抵接面积变得越小,制动蹄片58欲随着马达轴14朝向制动旋转方向dc移动时越能够减小从制动器壳体34赋予的反转方向dd的摩擦阻力。进而,容易使制动蹄片58朝向制动旋转方向dc牢固地咬入,从而容易利用制动蹄片58对马达轴14进行制动。
[0081]
制动蹄片58具备先与制动器壳体34抵接的第1制动抵接面70a及之后与制动器壳体34抵接的第2制动抵接面70b。接着对其优点进行说明。
[0082]
在此考虑只有制动蹄片58的第1制动抵接面70a抵接于制动器壳体34的第1制动阶
段(参考图5)。此时,与第2制动抵接面70b也抵接于制动器壳体34的情况相比,能够减小制动器壳体34与制动蹄片58之间的抵接面积。因此,在第1制动阶段中,能够减小从制动器壳体34赋予过来的朝向反转方向dd的摩擦阻力。进而,容易使制动蹄片58朝向制动旋转方向dc牢固地咬入制动器壳体34与马达轴14之间。
[0083]
并且,考虑第1制动抵接面70a及第2制动抵接面70b均抵接于制动器壳体34的第2制动阶段(参考图6)。此时,与处于第1制动阶段的情况相比,能够加大相对于制动器壳体34的抵接面积。由此,能够抑制制动蹄片58的晃动,从而能够通过制动蹄片58稳定地对马达轴14进行制动。
[0084]
非制动抵接面74为非制动时能够与制动器壳体34面接触的形状。由此,与使凸曲面状的制动抵接面70a抵接于平面状的制动器壳体34的被抵接面72b的情况相比,在非制动时,制动蹄片58不易围绕与轴向平行的假想线倾斜。这里的“非制动时”是指:推压机构60使制动蹄片58朝向退避方向db2移动时、或者推压机构60将制动蹄片58保持在制动解除位置pb的状态时。由此,能够避免出现非制动时因制动蹄片58倾斜导致制动蹄片58与马达轴14接触的情况。
[0085]
尤其,非制动抵接面74分别设置于一对被夹部68a、68b上。由此,在推压机构60将制动蹄片58保持在制动解除位置pb的状态下,能够使制动蹄片58在周向上的两侧的两个部位与制动器壳体34面接触。进而,能够有效地防止制动蹄片58倾斜。
[0086]
制动蹄片58以相对于推压部件76能够沿周向移动的方式连结于推压部件76。由此,能够允许制动蹄片58沿周向移动以使其夹入制动器壳体34与马达轴14之间。与此同时,与并未将制动蹄片58连结于推压部件76的情况相比,能够实现更坚固的机械结构。
[0087]
(第2实施方式)
[0088]
参考图8及图9。在第1实施方式的推压机构60中,为了使制动蹄片58从制动位置pa移动到制动解除位置pb,将推压部件76连结于制动蹄片58。与之相对,本实施方式的推压部件76并未连结于制动蹄片58。而且,在本实施方式的推压机构60中,具备为了使制动蹄片58从制动位置pa移动到制动解除位置pb而使制动蹄片58向退避方向db2施力的施力部件100a、100b。
[0089]
本实施方式的施力部件100a、100b为拉伸弹簧,并基于弹性变形的弹性复原力向制动蹄片58施力。拉伸弹簧(即,施力部件100a、100b)连结制动器壳体34与制动蹄片58。施力部件100a、100b包括:第1施力部件100a,与第1楔状空间56a相对应;及第2施力部件100b,与第2楔状空间56b相对应。第1施力部件100a能够使制动蹄片58朝向退避方向db2且第1楔状空间56a的间隔变宽的一侧(图中顺时针方向)施力。第2施力部件100b能够使制动蹄片58朝向退避方向db2且第2楔状空间56b的间隔变宽的一侧(图中逆时针)施力。
[0090]
接着,对上述马达装置10的动作进行说明。参考图9。利用制动器18对马达轴14的旋转进行制动时的动作与第1实施方式相同。在对马达轴14进行制动时,位于制动旋转方向dc侧的制动蹄片58的被夹部68a在配置有被夹部68a的楔状空间56a内夹入制动器壳体34与马达轴14之间。
[0091]
接着,对制动器18解除对马达轴14的制动时的动作进行说明。此时,与第1实施方式同样,推压机构60向退避方向db2驱动推压机构60的推压部件76。在本实施方式中,由于制动蹄片58并未连结于推压部件76,因此只有推压部件76朝向退避方向db2移动,从而解除
推压部件76对制动蹄片58的推压。由此,通过与夹入有制动蹄片58的楔状空间56a相对应的施力部件100a,制动蹄片58能够向退避方向db2移动。此时,通过施力部件100a,能够使制动蹄片58朝向退避方向db2且夹入有制动蹄片58的楔状空间56a的间隔变宽的一侧(图9的顺时针方向)移动。其结果,制动蹄片58能够从制动位置pa移动至制动解除位置pb。
[0092]
根据上述马达装置10,由于具备上述(a)及(b)中说明的构成要件,因此也能够获得与其说明相对应的效果。
[0093]
除此之外,由于推压部件76并未连结于制动蹄片58,因此能够省略连结推压部件76与制动蹄片58所需的组件。进而,能够在推压部件76与制动蹄片58之间确保较宽的空间。
[0094]
在此,对施力部件100a、100b为弹簧等弹性部件的例子进行了说明。施力部件100a、100b的具体例并不受特别限定。施力部件100a、100b例如也可以是磁铁。这是假定了通过磁铁的磁力对制动蹄片58施力的情况。
[0095]
参考图10。在第1实施方式中,对马达轴14的外周面为圆形且制动蹄片58的制动面66为圆弧状的例子进行了说明。与之相对,本实施方式的马达轴14的外周面及制动蹄片58的制动面66上形成有彼此啮合的凹凸结构102。该凹凸结构102为凹部与凸部沿周向交替排列的结构。由此,通过制动蹄片58,能够对马达轴14赋予更强大的制动力。
[0096]
(第3实施方式)
[0097]
参考图11。本实施方式的马达装置10与第1实施方式的不同点在于,推压机构60的结构不同。本实施方式的推压机构60的非电动驱动部78与电动驱动部80配置于互不相同的部位。接着,对此进行详述。电动驱动部80容纳于设置在制动器壳体34的与容纳凹部54不同的部位的机构容纳部110。将与推压部件76的进退方向db及轴向x正交的方向称为正交方向de。此时,电动驱动部80在正交方向de上配置于与制动蹄片58错开的位置上。非电动驱动部78则与第1实施方式同样地容纳于容纳凹部54内。
[0098]
在第1实施方式中,对推压部件76为电动驱动部80的杆84的例子进行了说明。本实施方式的推压部件76为与杆84不同的连杆机构112的第2连杆部件116。接着,对此进行详述。
[0099]
杆84经由连杆机构112连结于制动蹄片58。连杆机构112具备:第1连杆部件114,连结于杆84;及第2连杆部件116,连结于制动蹄片58。第1连杆部件114的一端部经由固定销118能够旋转地固定于制动器壳体34。第1连杆部件114的另一端部经由第1连结销120能够旋转地连结于杆84。第2连杆部件116的一端部经由第2连结销122能够旋转地连结于第1连杆部件114的中间部。第2连杆部件116的另一端部经由第3连结销124能够旋转地连结于制动蹄片58。
[0100]
第2连杆部件116构成推压部件76。构成非电动驱动部78的压缩弹簧连结制动器壳体34与第2连杆部件116。
[0101]
电动驱动部80在电动驱动部80的线圈86处于通电状态时,经由连杆机构112将退避方向db2的第2驱动力fb赋予给推压部件76。其结果,与第1实施方式一样,处于该状态时,推压部件76抵抗非电动驱动部78的第1驱动力fa而基于第2驱动力fb朝向退避方向db2移动。与之相对,在电动驱动部80处于未通电状态时,与第1实施方式同样,通过非电动驱动部78的第1驱动力fa,推压部件76朝向前进方向b1移动。
[0102]
根据上述马达装置10,由于具备上述(a)及(b)中说明的构成要件,因此也能够获
得与其说明相对应的效果。
[0103]
除此之外,通过将电动驱动部80配置于与容纳凹部54不同的部位,能够减小制动器壳体34整体的外径尺寸。
[0104]
(第4实施方式)
[0105]
参考图12及图13。本实施方式的马达装置10与第1实施方式的不同点在于,推压部件76及制动蹄片58的结构不同。本实施方式的推压部件76与杆84分体设置并且安装于杆84的前进方向db1侧的端部。
[0106]
制动蹄片58由滚柱130a、130b构成。滚柱130a、130b(制动蹄片58)包括:第1滚柱130a,能够自转地配置于第1楔状空间56a;及第2滚柱130b,能够自转地配置于第2楔状空间56b。滚柱130a、130b为沿轴向x延伸的的圆柱状体。
[0107]
接着,对上述马达装置10的动作进行说明。首先,对利用制动器18对马达轴14的旋转进行制动时的动作进行说明。参考图13。推压机构60在对马达轴14的旋转进行制动时使推压部件76朝向前进方向db1移动,从而通过推压部件76朝向马达轴14的外周推压滚柱130a、130b。若朝向马达轴14的外周推压制动蹄片58,则位于制动旋转方向dc侧的第1滚柱130a随着马达轴14的旋转朝向制动旋转方向dc移动。此时,第1滚柱130a在第1楔状空间56a内朝向间隔变窄的一侧(图中的逆时针方向)移动。在楔状空间56a内朝向间隔变宽的一侧的第1滚柱130a的动作被推压部件76限制。其结果,第1滚柱130a在第1楔状空间56a内夹入马达轴14与制动器壳体34之间。通过该第1滚柱130a,能够对马达轴14的旋转进行制动。
[0108]
另一方面,位于反转方向dd侧的第2滚柱130b随着马达轴14的旋转欲朝向制动旋转方向dc移动。此时,第2滚柱130b在第2楔状空间56b内欲朝向间隔变宽的一侧(图中的逆时针方向)移动。该第2滚柱130b的移动被推压部件76限制。其结果,第2滚柱130b在第2楔状空间56b内不会夹入马达轴14与制动器壳体34之间,继续进行自转。
[0109]
接着,对解除制动器18对马达轴14的制动时的动作进行说明。参考图12。推压机构60在解除对马达轴14的制动时,使推压部件76朝向退避方向db2移动。由此,推压部件76对滚柱130a、130b的推压被解除。其结果,允许滚柱130a、130b在楔状空间56a、56b内朝向间隔变宽的一侧移动。由此,即使在滚柱130a、130b欲随着马达轴14的旋转而移动的情况下,也能够在楔状空间56a、56b内朝向间隔变宽的一侧移动,因而能够避免产生对马达轴14的旋转进行制动的情况。其结果,能够解除滚柱130a、130b对马达轴14的制动。
[0110]
根据上述马达装置10,由于具备上述(a)及(b)中说明的构成要件,因此也能够获得与其说明相对应的效果。
[0111]
接着,对各构成要件的其他变形例进行说明。
[0112]
马达装置10的用途并不受特别限定。马达装置10例如除了可以用于工业用机械手12以外,还可以用于agv等自动搬运台车。在将马达装置10用于工业用机械手12的情况下,也可以用于除了协作机器人以外的其他工业用机械手12。成为马达装置10的旋转动力的传递对象的被驱动部件的具体例并不受特别限定。
[0113]
在马达装置10中,减速装置22并不是必须的。即,马达轴14也可以直接向被驱动部件传递旋转动力。
[0114]
用于减速装置22的减速机构38的具体例并不受特别限定。减速机构38除了可以使用挠曲啮合式减速机构之外,例如也可以使用偏心摆动型减速机构、行星齿轮机构、正交轴
齿轮机构、平行轴齿轮机构等。在采用挠曲啮合式减速机构时,其具体例并不受特别限定。除了可以采用筒型的挠曲啮合式减速机构之外,例如也可以采用杯型或礼帽型的挠曲啮合式减速机构。减速装置22的输出部件42除了可以是轮架48之外也可以是外壳40。
[0115]
制动器18的配置位置并不受特别限定。例如,制动器18也可以相对于马达16配置于输出相反侧。
[0116]
推压机构60的具体例并不受特别限定。例如,电动驱动部80的第2驱动方向da2也可以是前进方向db1,非电动驱动部78的第1驱动方向da1也可以是退避方向db2。此时,在不对电动驱动部80供给电力时,制动蹄片58保持解除马达轴14的制动的状态。
[0117]
制动蹄片58的制动抵接面70a、70b的形状及制动器壳体34的被抵接面72a、72b的形状并不受特别限定。例如,也可以将制动抵接面70a、70b及被抵接面72a、72b设为相同曲率半径的曲面状。制动蹄片58也可以不具备与制动器壳体34抵接的时刻互不相同的第1制动抵接面70a及第2制动抵接面70b。即,在制动蹄片58随着马达轴14朝向制动旋转方向dc移动时,制动蹄片58的制动抵接面70a、70b一旦与制动器壳体34抵接,则之后无需额外再增加抵接部位。
[0118]
制动蹄片58的非制动抵接面74也可以不是非制动时能够与制动器壳体34面接触的形状。也可以仅在一对被夹部68a、68b中的一个被夹部上设置非制动时能够与制动器壳体34面接触的形状的非制动抵接面74。并且,非制动抵接面74可以相对于第1制动抵接面70a设置于楔状空间56a、56b的间隔变窄的一侧,也可以相对于第2制动抵接面70b设置于楔状空间56a、56b的间隔变宽的一侧。
[0119]
将制动蹄片58以相对于推压部件76能够沿周向移动的方式连结于推压部件76的具体机构并不受特别限定。例如,也可以经由滑动机构等将制动蹄片58以相对于推压部件76能够移动的方式连结于推压部件76。
[0120]
以上实施方式及变形方式只不过是示例。将这些进行抽象化的技术思想不应被解释为仅限于实施方式及变形方式的内容。实施方式及变形方式的内容能够进行构成要件的变更、追加、删除等各种设计变更。在上述实施方式中,关于能够进行这种设计变更的内容,标注“实施方式”来进行了强调。然而,没有这种标注的内容也允许设计变更。在附图的截面标出的阴影线并不限定标注有阴影线的对象的材质。
[0121]
以上构成要件的任意组合也同样有效。例如,也可以对实施方式组合其他实施方式的任意内容,也可以对变形例组合实施方式及其他变形例的任意内容。
[0122]
接着,对其具体例进行说明。例如,也可以将在第1实施方式中说明的制动蹄片58的制动抵接面70a、70b、非制动抵接面74分别适用于在第2~第3实施方式中说明的制动蹄片58。也可以将在第2实施方式中说明的凹凸结构102适用于在第1及第3实施方式中说明的制动蹄片58。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1