基于北斗和5G的电力巡检设备高精度监控系统及设备的制作方法
基于北斗和5g的电力巡检设备高精度监控系统及设备
技术领域
1.本发明涉及电力监控技术领域,尤其涉及基于北斗和5g的电力巡检设备高精度监控系统及设备。
背景技术:
2.卫星导航系统是一个国家重要的空间信息基础设施,是国家综合国力、核心竞争力与科技创新能力的重要标志和集中体现。当前,我国对卫星导航产业的发展高度重视,国家发改委牵头联合多部门共同起草了北斗产业中长期规划,并将北斗导航系统系统列入《国家中长期科学和技术发展规划纲要》16项重大科技专项之一。
3.通常变电站地处偏远,地理条件恶劣。在电压等级上,随着电力技术的发展,由原来以少量110kv和220kv变电站为枢纽变电站。35kv为终端变电站的小电网输送模式,逐步发展成以特高压1000kv变电站和500kv变电站为枢纽变电站,220kv、110kv变电站为终端变电站的大电网输送模式。而电力巡检是变电值班的一项重要工作,站内设备数量繁多,且密度程度高。从规范角度,对于大站的一次巡检的时间超过4小时,非常容易造成巡检工作的疏漏,到位监督缺乏技术手段,对于巡检信息的传递迟缓,规范化的巡检流程得不到有效的执行。
4.目前我国的变电站设备巡检主要依靠巡检机器人进行巡检。但是在机器人巡检过程中往往是通过摄像头进行检测,由于摄像头距离电力设备距离较远,因而检测结果不够精准,而且在巡检过程中无法对存有隐患的电力设备进行精准定位,尤其在大型变电站中,由于变电站占用面积较大,如果无法精准进行定位,进而导致后期检修人员不能快速、准确的对存有隐患的电力设备进行及时检修,容易使存有隐患的电力设备出现损坏或是爆炸。
技术实现要素:
5.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种结构紧凑,提高检测精准度,能够对存有隐患的电力设备精准定位的基于北斗和5g的电力巡检设备高精度监控系统及设备。
6.为了实现上述目的,本发明采用了如下技术方案:
7.基于北斗和5g的电力巡检设备高精度监控系统及设备,包括变电站,所述变电站内设有多个检测区,所述变电站的底部内壁设有多个分别位于检测区内的电动车,所述检测区相互远离的一侧内壁均固定连接有放置架,所述放置架内设有多个电力设备,所述检测区的一侧内壁固定连接有两个相对称的y轴坐标尺,所述检测区的底部内壁固定连接有两个相对称的x轴坐标尺,且x轴坐标尺与y轴坐标尺相靠近的一端固定连接,所述检测区的内部呈竖向滑动连接有两个相对称的第一滑杆,所述第一滑杆的外壁设有用于对电力设备进行检测的检测组件,所述检测区内设有用于使第一滑杆往复移动的往复组件,所述电动车内设有驱动组件,且驱动组件用于驱动往复组件,所述电动车的一侧内壁固定连接有子控制中心,所述电动车的顶部内壁固定连接有局域wifi,所述检测区的底部内壁固定嵌装
有二维码,所述电动车的底部固定嵌装有用于扫描二维码的扫码器。
8.优选的,所述检测组件包括滑动套设在第一滑杆外壁的固定块,所述第一滑杆的一侧固定连接有两个相对称的固定板,两个所述固定板之间转动连接有同一个螺杆,且螺杆的一端螺纹贯穿固定块,所述固定块靠近相邻电力设备的一侧固定连接有红外热成像器和烟雾感应器,所述固定块的顶部固定连接有第一距离感应器,所述第一滑杆的一侧底部固定连接有第二距离感应器,所述螺杆的顶端外壁固定套设有第一伞齿轮,所述第一滑杆内设有转动电机,所述转动电机的输出轴固定连接有与第一伞齿轮相啮合的第二伞齿轮。
9.优选的,所述往复组件包括设置在检测区底部内壁的空腔,所述检测区的底部内壁设有两个相对称的矩形通孔,且矩形通孔与空腔相连通,所述第一滑杆的底端贯穿矩形通孔并和矩形通孔滑动连接,所述空腔的底部内壁转动连接有转动轴,所述转动轴的外壁固定套设有第一转动板,所述第一转动板内设有两个相对称的第一通孔,所述第一滑杆的底端贯穿第一通孔并与空腔的底部内壁滑动连接,所述转动轴的顶端固定连接有第一齿轮,所述空腔的顶部内壁转动连接有转动杆,所述转动杆的底端固定连接有不完全齿轮,所述不完全齿轮的底部偏离圆心俯一侧固定连接有凸块,所述空腔的底部内壁滑动连接有两个相对称的矩形块,两个所述矩形块的底部固定连接有同一个齿条,且齿条与第一齿轮相啮合,所述齿条远离第一齿轮的一端固定连接有环形滑块,且凸块的底端延伸至环形滑块中并和环形滑块滑动连接,所述转动杆的顶端延伸至检测区内并固定连接有转动块,所述转动块内设有凹槽。
10.优选的,所述驱动组件包括滑动连接在电动车一侧内壁的滑动板,所述滑动板的顶部固定连接有驱动电机,所述滑动板的底部转动连接有贯穿电动车底部的第一转轴,且驱动电机的输出轴贯穿滑动板的底部并与第一转轴的顶端固定连接,所述第一转轴的外壁固定套设有圆形块,所述电动车的底部内壁固定连接有电动推杆,所述电动车的底部内壁滑动连接有与圆形块相配合的梯形块,且电动推杆的输出轴与梯形块固定连接,所述第一转轴的底端固定连接有位于凹槽内的圆块,所述圆块内设有两个相对称的滑槽,转动块的内壁设有两个相对称的卡槽,所述滑槽内滑动连接有延伸至卡槽内的销,所述销远离卡槽的一端固定连接有弹簧,且弹簧的另一端与滑槽的一侧内壁固定连接。
11.优选的,所述检测区的顶部内壁以转动轴为圆心转动连接有第二转动板,所述第二转动板内设有两个相对称的第二通孔,且第一滑杆的顶端贯穿第二通孔并与第二通孔滑动连接,在第一滑杆进行移动时通过第二转动板能够使第一滑杆的顶部更加稳定,防止第一滑杆的顶部出现晃动。
12.优选的,所述第一转轴的外壁转动套设有位于电动车下方的矩形板,所述检测区的底部内壁设有固定槽,所述矩形板的底部固定连接有延伸至固定槽内的固定杆,所述矩形板的顶部远离固定杆的一侧固定连接有第二滑杆,且第二滑杆的顶端滑动延伸至电动车内,在第一转轴带动矩形板向下移动时,固定杆刚好能够卡入固定槽中,进而能够在第一转轴带动转动杆转动时避免电动车出现晃动。
13.优选的,所述电动车内转动连接有圆环,且第一转轴的一侧滑动贯穿圆环。
14.优选的,所述电动车的顶部固定连接有太阳能电板,所述电动车内设有与太阳能电板电性连接的蓄电池,在电动车从检测区中离开时,在外界移动,此时通过太阳能电板能够通过太阳能发电,并将电能储蓄在蓄电池中,为电动车、子控制中心、局域wifi、驱动电机
和电动推杆提供能源。
15.优选的,所述电动车内呈横向转动连接有蜗杆,所述蜗杆的外壁固定套设有滚轮,且滚轮的底部贯穿电动车,滚轮与检测区的底部内壁相接触,所述电动车的底部转动贯穿有第二转轴,所述第二转轴的顶端固定连接有与蜗杆相啮合的蜗轮,所述第二转轴的底端固定连接有转动地刷,所述滚轮的外壁固定套设有橡胶层,在电动车移动的过程中滚轮受到变电站的摩擦力作用开始转动,滚轮带动蜗杆转动,且蜗杆和蜗轮相啮合,蜗轮带动第二转轴和转动地刷转动,对地面进行清扫,进而在电动车移动的过程中能够将二维码表层的灰尘清扫干净,避免灰尘过多将二维码遮挡,影响后期扫码器的扫描。
16.一种基于北斗和5g的电力巡检设备高精度监控系统,包括红外热成像器、烟雾感应器、第一距离感应器、第二距离感应器、驱动电机、电动推杆、扫码器、子控制中心、局域wifi、转动电机,北斗导航系统、总控制中心,所述第一距离感应器和第二距离感应器、北斗导航系统连接,所述子控制中心与电动推杆、局域wifi、扫码器、驱动电机连接,所述局域wifi与转动电机连接,所述局域wifi与红外热成像器、烟雾感应器连接,所述红外热成像器和烟雾感应器、子控制中心连接,且扫码器与北斗导航系统连接,所述北斗导航系统和子控制中心、总控制中心连接。
17.与现有技术相比,本发明提供了基于北斗和5g的电力巡检设备高精度监控系统及设备,具备以下有益效果:
18.1、该基于北斗和5g的电力巡检设备高精度监控设备的检测区的底部内壁固定连连接有x轴坐标尺,所述检测区的一侧内壁固定连接有y轴坐标尺,且y轴坐标尺和x轴坐标尺相互靠近的一端固定连接,通过y轴坐标尺和x轴坐标尺能够方便后期检修人员能够快速确定存有隐患电力设备的具体位置,避免变电站面积过大,无法精准找到存有隐患的电力设备,从而导致电力设备出现故障和爆炸。
19.2、该基于北斗和5g的电力巡检设备高精度监控设备的第一滑杆的外壁滑动套设有固定块,所述固定块靠近放置架的一侧固定连接有红外热成像器和烟雾感应器,所述螺杆的底端螺纹贯穿固定块,随着转动轴的来回往复转动能够带动第一滑杆和固定块进行往复移动,且随着螺杆的转动能够使固定块上下移动,从而能够使红外热成像器和烟雾感应器对放置架内的电力设备进行近距离检测扫描,从而能够得到精准的检测数据。
20.3、该基于北斗和5g的电力巡检设备高精度监控设备的固定块的顶部固定连接有第一距离感应器,所述第一滑杆的一侧固定连接有第二距离感应器,在固定块和第一滑杆移动的同时,第一距离感应器和第二距离感应器能够对固定块和第一滑杆的移动距离进行记录并将数据传输至北斗导航系统处,北斗导航系统将精准的位置数据传输至外界的总控制中心,方便后期检修人员根据位置坐标精准的找寻存在隐患的电力设备。
21.4、该基于北斗和5g的电力巡检设备高精度监控设备的检测区的底部内壁固定嵌装有二维码,所述电动车的底部固定嵌装有扫码器,在电动车移动时,通过扫码器能够对二维码进行扫描,用于确定电动车目前所处的大概区域,对电动车进行初步定位。
22.本发明结构简单,通过启动驱动电机带动第一转轴转动,进而能够通过第一转动板的往复转动带动第一滑杆和转动杆往复滑动对放置架内x方向上的电力设备进行检测,且启动转动电机能够使固定块上下移动对放置架内y方向的电力设备进行检测,且在固定块移动检测时通过第一距离感应器和第二距离感应器将第一距离感应器移动的数据传输
至北斗导航系统,用以精准确定存有隐患电力设备的精准位置。
附图说明
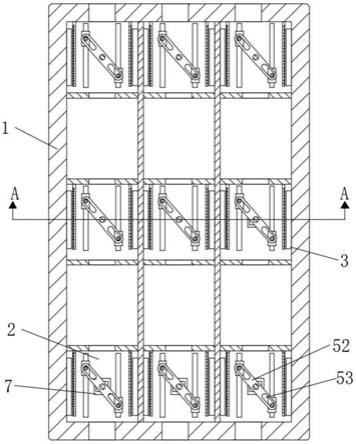
23.图1为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的俯视剖视图;
24.图2为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的图1中检测区的俯视剖视图;
25.图3为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的a
‑
a剖视图;
26.图4为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的b
‑
b剖视图;
27.图5为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的c
‑
c剖视图;
28.图6为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的d处放大图;
29.图7为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的e处放大图;
30.图8为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的f处放大图;
31.图9为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的图3中电动车的剖视图;
32.图10为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的圆形块的三维图;
33.图11为本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的系统框图;
34.图12为实施例二中本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的电动车的视图;
35.图13为实施例二中本发明提出的基于北斗和5g的电力巡检设备高精度监控系统及设备的g
‑
g剖视图。
36.图中:1、变电站;2、检测区;3、放置架;4、电力设备;5、y轴坐标尺;6、x轴坐标尺;7、电动车;8、空腔;9、矩形通孔;10、第一滑杆;11、转动轴;12、第一转动板;13、第一通孔;14、转动杆;15、不完全齿轮;16、凸块;17、第一齿轮;18、环形滑块;19、固定板;20、螺杆;21、第一伞齿轮;22、转动电机;23、第二伞齿轮;24、固定块;25、红外热成像器;26、烟雾感应器;27、第一距离感应器;28、第二距离感应器;29、滑动板;30、驱动电机;31、第一转轴;32、圆形块;33、电动推杆;34、梯形块;35、圆块;36、销;37、滑槽;38、弹簧;39、凹槽;40、卡槽;41、扫码器;42、二维码;43、滚轮;44、蜗杆;45、第二转轴;46、转动地刷;47、蜗轮;48、子控制中心;49、局域wifi;50、蓄电池;51、太阳能电板;52、第二转动板;53、第二通孔;54、矩形板;55、固定杆;56、第二滑杆;57、固定槽;58、橡胶层;59、转动块;60、齿条;61、圆环;62、矩形块。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
38.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
39.实施例1:
40.参照图1
‑
11,基于北斗和5g的电力巡检设备高精度监控设备,包括变电站1,变电站1内设有多个检测区2,变电站1的底部内壁设有多个分别位于检测区2内的电动车7,检测区2相互远离的一侧内壁均固定连接有放置架3,放置架3内设有多个电力设备4,检测区2的一侧内壁固定连接有两个相对称的y轴坐标尺5,检测区2的底部内壁固定连接有两个相对称的x轴坐标尺6,且x轴坐标尺6与y轴坐标尺5相靠近的一端固定连接,检测区2的内部呈竖向滑动连接有两个相对称的第一滑杆10,第一滑杆10的外壁设有用于对电力设备4进行检测的检测组件,检测区2内设有用于使第一滑杆10往复移动的往复组件,电动车7内设有驱动组件,且驱动组件用于驱动往复组件,电动车7的一侧内壁固定连接有子控制中心48,电动车7的顶部内壁固定连接有局域wifi49,检测区2的底部内壁固定嵌装有二维码42,电动车7的底部固定嵌装有用于扫描二维码42的扫码器41。
41.本发明中,检测区2的底部内壁固定连连接有x轴坐标尺6,检测区2的一侧内壁固定连接有y轴坐标尺5,且y轴坐标尺5和x轴坐标尺6相互靠近的一端固定连接,通过y轴坐标尺5和x轴坐标尺6能够方便后期检修人员能够快速确定存有隐患电力设备4的具体位置,避免变电站1面积过大,无法精准找到存有隐患的电力设备4,从而导致电力设备4出现故障和爆炸。
42.本发明中,检测区2的底部内壁固定嵌装有二维码42,电动车7的底部固定嵌装有扫码器41,在电动车7移动时,通过扫码器41能够对二维码42进行扫描,用于确定电动车7目前所处的大概区域,对电动车7进行初步定位。
43.本发明中,检测组件包括滑动套设在第一滑杆10外壁的固定块24,第一滑杆10的一侧固定连接有两个相对称的固定板19,两个固定板19之间转动连接有同一个螺杆20,且螺杆20的一端螺纹贯穿固定块24,固定块24靠近相邻电力设备4的一侧固定连接有红外热成像器25和烟雾感应器26,固定块24的顶部固定连接有第一距离感应器27,第一滑杆10的一侧底部固定连接有第二距离感应器28,螺杆20的顶端外壁固定套设有第一伞齿轮21,第一滑杆10内设有转动电机22,转动电机22的输出轴固定连接有与第一伞齿轮21相啮合的第二伞齿轮23。
44.本发明中,固定块24的顶部固定连接有第一距离感应器27,第一滑杆10的一侧固定连接有第二距离感应器28,在固定块24和第一滑杆10移动的同时,第一距离感应器27和第二距离感应器28能够对固定块24和第一滑杆10的移动距离进行记录并将数据传输至北斗导航系统处,北斗导航系统将精准的位置数据传输至外界的总控制中心,方便后期检修人员根据位置坐标精准的找寻存在隐患的电力设备4。
45.本发明中,第一滑杆10的外壁滑动套设有固定块24,固定块24靠近放置架3的一侧
固定连接有红外热成像器25和烟雾感应器26,螺杆20的底端螺纹贯穿固定块24,随着转动轴11的来回往复转动能够带动第一滑杆10和固定块24进行往复移动,且随着螺杆20的转动能够使固定块24上下移动,从而能够使红外热成像器25和烟雾感应器26对放置架3内的电力设备4进行近距离检测扫描,从而能够得到精准的检测数据。
46.本发明中,往复组件包括设置在检测区2底部内壁的空腔8,检测区2的底部内壁设有两个相对称的矩形通孔9,且矩形通孔9与空腔8相连通,第一滑杆10的底端贯穿矩形通孔9并和矩形通孔9滑动连接,空腔8的底部内壁转动连接有转动轴11,转动轴11的外壁固定套设有第一转动板12,第一转动板12内设有两个相对称的第一通孔13,第一滑杆10的底端贯穿第一通孔13并与空腔8的底部内壁滑动连接,转动轴11的顶端固定连接有第一齿轮17,空腔8的顶部内壁转动连接有转动杆14,转动杆14的底端固定连接有不完全齿轮15,不完全齿轮15的底部偏离圆心俯一侧固定连接有凸块16,空腔8的底部内壁滑动连接有两个相对称的矩形块62,两个矩形块62的底部固定连接有同一个齿条60,且齿条60与第一齿轮17相啮合,齿条60远离第一齿轮17的一端固定连接有环形滑块18,且凸块16的底端延伸至环形滑块18中并和环形滑块18滑动连接,转动杆14的顶端延伸至检测区2内并固定连接有转动块59,转动块59内设有凹槽39。
47.本发明中,驱动组件包括滑动连接在电动车7一侧内壁的滑动板29,滑动板29的顶部固定连接有驱动电机30,滑动板29的底部转动连接有贯穿电动车7底部的第一转轴31,且驱动电机30的输出轴贯穿滑动板29的底部并与第一转轴31的顶端固定连接,第一转轴31的外壁固定套设有圆形块32,电动车7的底部内壁固定连接有电动推杆33,电动车7的底部内壁滑动连接有与圆形块32相配合的梯形块34,且电动推杆33的输出轴与梯形块34固定连接,第一转轴31的底端固定连接有位于凹槽39内的圆块35,圆块35内设有两个相对称的滑槽37,转动块59的内壁设有两个相对称的卡槽40,滑槽37内滑动连接有延伸至卡槽40内的销36,销36远离卡槽40的一端固定连接有弹簧38,且弹簧38的另一端与滑槽37的一侧内壁固定连接。
48.本发明中,检测区2的顶部内壁以转动轴11为圆心转动连接有第二转动板52,第二转动板52内设有两个相对称的第二通孔53,且第一滑杆10的顶端贯穿第二通孔53并与第二通孔53滑动连接,在第一滑杆10进行移动时通过第二转动板52能够使第一滑杆10的顶部更加稳定,防止第一滑杆10的顶部出现晃动。
49.本发明中,第一转轴31的外壁转动套设有位于电动车7下方的矩形板54,检测区2的底部内壁设有固定槽57,矩形板54的底部固定连接有延伸至固定槽57内的固定杆55,矩形板54的顶部远离固定杆55的一侧固定连接有第二滑杆56,且第二滑杆56的顶端滑动延伸至电动车7内,在第一转轴31带动矩形板54向下移动时,固定杆55刚好能够卡入固定槽57中,进而能够在第一转轴31带动转动杆14转动时避免电动车7出现晃动。
50.本发明中,电动车7内转动连接有圆环61,且第一转轴31的一侧滑动贯穿圆环61。
51.本发明中,电动车7的顶部固定连接有太阳能电板51,电动车7内设有与太阳能电板51电性连接的蓄电池50,在电动车7从检测区2中离开时,在外界移动,此时通过太阳能电板51能够通过太阳能发电,并将电能储蓄在蓄电池50中,为电动车7、子控制中心48、局域wifi49、驱动电机30和电动推杆33提供能源。
52.本实施例的基于北斗和5g的电力巡检设备高精度监控系统,包括红外热成像器
25、烟雾感应器26、第一距离感应器27、第二距离感应器28、驱动电机30、电动推杆33、扫码器41、子控制中心48、局域wifi49、转动电机22,北斗导航系统、总控制中心,第一距离感应器27和第二距离感应器28、北斗导航系统连接,子控制中心48与电动推杆33、局域wifi49、扫码器41、驱动电机30连接,局域wifi49与转动电机22连接,局域wifi49与红外热成像器25、烟雾感应器26连接,红外热成像器25和烟雾感应器26、子控制中心48连接,且扫码器41与北斗导航系统连接,北斗导航系统和子控制中心48、总控制中心连接。
53.实施例2:
54.参照图1
‑
13,基于北斗和5g的电力巡检设备高精度监控设备,包括变电站1,变电站1内设有多个检测区2,变电站1的底部内壁设有多个分别位于检测区2内的电动车7,检测区2相互远离的一侧内壁均固定连接有放置架3,放置架3内设有多个电力设备4,检测区2的一侧内壁固定连接有两个相对称的y轴坐标尺5,检测区2的底部内壁固定连接有两个相对称的x轴坐标尺6,且x轴坐标尺6与y轴坐标尺5相靠近的一端固定连接,检测区2的内部呈竖向滑动连接有两个相对称的第一滑杆10,第一滑杆10的外壁设有用于对电力设备4进行检测的检测组件,检测区2内设有用于使第一滑杆10往复移动的往复组件,电动车7内设有驱动组件,且驱动组件用于驱动往复组件,电动车7的一侧内壁固定连接有子控制中心48,电动车7的顶部内壁固定连接有局域wifi49,检测区2的底部内壁固定嵌装有二维码42,电动车7的底部固定嵌装有用于扫描二维码42的扫码器41。
55.本发明中,检测区2的底部内壁固定连连接有x轴坐标尺6,检测区2的一侧内壁固定连接有y轴坐标尺5,且y轴坐标尺5和x轴坐标尺6相互靠近的一端固定连接,通过y轴坐标尺5和x轴坐标尺6能够方便后期检修人员能够快速确定存有隐患电力设备4的具体位置,避免变电站1面积过大,无法精准找到存有隐患的电力设备4,从而导致电力设备4出现故障和爆炸。
56.本发明中,检测区2的底部内壁固定嵌装有二维码42,电动车7的底部固定嵌装有扫码器41,在电动车7移动时,通过扫码器41能够对二维码42进行扫描,用于确定电动车7目前所处的大概区域,对电动车7进行初步定位。
57.本发明中,检测组件包括滑动套设在第一滑杆10外壁的固定块24,第一滑杆10的一侧固定连接有两个相对称的固定板19,两个固定板19之间转动连接有同一个螺杆20,且螺杆20的一端螺纹贯穿固定块24,固定块24靠近相邻电力设备4的一侧固定连接有红外热成像器25和烟雾感应器26,固定块24的顶部固定连接有第一距离感应器27,第一滑杆10的一侧底部固定连接有第二距离感应器28,螺杆20的顶端外壁固定套设有第一伞齿轮21,第一滑杆10内设有转动电机22,转动电机22的输出轴固定连接有与第一伞齿轮21相啮合的第二伞齿轮23。
58.本发明中,固定块24的顶部固定连接有第一距离感应器27,第一滑杆10的一侧固定连接有第二距离感应器28,在固定块24和第一滑杆10移动的同时,第一距离感应器27和第二距离感应器28能够对固定块24和第一滑杆10的移动距离进行记录并将数据传输至北斗导航系统处,北斗导航系统将精准的位置数据传输至外界的总控制中心,方便后期检修人员根据位置坐标精准的找寻存在隐患的电力设备4。
59.本发明中,第一滑杆10的外壁滑动套设有固定块24,固定块24靠近放置架3的一侧固定连接有红外热成像器25和烟雾感应器26,螺杆20的底端螺纹贯穿固定块24,随着转动
轴11的来回往复转动能够带动第一滑杆10和固定块24进行往复移动,且随着螺杆20的转动能够使固定块24上下移动,从而能够使红外热成像器25和烟雾感应器26对放置架3内的电力设备4进行近距离检测扫描,从而能够得到精准的检测数据。
60.本发明中,往复组件包括设置在检测区2底部内壁的空腔8,检测区2的底部内壁设有两个相对称的矩形通孔9,且矩形通孔9与空腔8相连通,第一滑杆10的底端贯穿矩形通孔9并和矩形通孔9滑动连接,空腔8的底部内壁转动连接有转动轴11,转动轴11的外壁固定套设有第一转动板12,第一转动板12内设有两个相对称的第一通孔13,第一滑杆10的底端贯穿第一通孔13并与空腔8的底部内壁滑动连接,转动轴11的顶端固定连接有第一齿轮17,空腔8的顶部内壁转动连接有转动杆14,转动杆14的底端固定连接有不完全齿轮15,不完全齿轮15的底部偏离圆心俯一侧固定连接有凸块16,空腔8的底部内壁滑动连接有两个相对称的矩形块62,两个矩形块62的底部固定连接有同一个齿条60,且齿条60与第一齿轮17相啮合,齿条60远离第一齿轮17的一端固定连接有环形滑块18,且凸块16的底端延伸至环形滑块18中并和环形滑块18滑动连接,转动杆14的顶端延伸至检测区2内并固定连接有转动块59,转动块59内设有凹槽39。
61.本发明中,驱动组件包括滑动连接在电动车7一侧内壁的滑动板29,滑动板29的顶部固定连接有驱动电机30,滑动板29的底部转动连接有贯穿电动车7底部的第一转轴31,且驱动电机30的输出轴贯穿滑动板29的底部并与第一转轴31的顶端固定连接,第一转轴31的外壁固定套设有圆形块32,电动车7的底部内壁固定连接有电动推杆33,电动车7的底部内壁滑动连接有与圆形块32相配合的梯形块34,且电动推杆33的输出轴与梯形块34固定连接,第一转轴31的底端固定连接有位于凹槽39内的圆块35,圆块35内设有两个相对称的滑槽37,转动块59的内壁设有两个相对称的卡槽40,滑槽37内滑动连接有延伸至卡槽40内的销36,销36远离卡槽40的一端固定连接有弹簧38,且弹簧38的另一端与滑槽37的一侧内壁固定连接。
62.本发明中,检测区2的顶部内壁以转动轴11为圆心转动连接有第二转动板52,第二转动板52内设有两个相对称的第二通孔53,且第一滑杆10的顶端贯穿第二通孔53并与第二通孔53滑动连接,在第一滑杆10进行移动时通过第二转动板52能够使第一滑杆10的顶部更加稳定,防止第一滑杆10的顶部出现晃动。
63.本发明中,第一转轴31的外壁转动套设有位于电动车7下方的矩形板54,检测区2的底部内壁设有固定槽57,矩形板54的底部固定连接有延伸至固定槽57内的固定杆55,矩形板54的顶部远离固定杆55的一侧固定连接有第二滑杆56,且第二滑杆56的顶端滑动延伸至电动车7内,在第一转轴31带动矩形板54向下移动时,固定杆55刚好能够卡入固定槽57中,进而能够在第一转轴31带动转动杆14转动时避免电动车7出现晃动。
64.本发明中,电动车7内转动连接有圆环61,且第一转轴31的一侧滑动贯穿圆环61。
65.本发明中,电动车7的顶部固定连接有太阳能电板51,电动车7内设有与太阳能电板51电性连接的蓄电池50,在电动车7从检测区2中离开时,在外界移动,此时通过太阳能电板51能够通过太阳能发电,并将电能储蓄在蓄电池50中,为电动车7、子控制中心48、局域wifi49、驱动电机30和电动推杆33提供能源。
66.本发明中,电动车7内呈横向转动连接有蜗杆44,蜗杆44的外壁固定套设有滚轮43,且滚轮43的底部贯穿电动车7,滚轮43与检测区2的底部内壁相接触,电动车7的底部转
动贯穿有第二转轴45,第二转轴45的顶端固定连接有与蜗杆44相啮合的蜗轮47,第二转轴45的底端固定连接有转动地刷46,滚轮43的外壁固定套设有橡胶层58,且电动车7的底部四角均设有行走轮,在电动车7移动的过程中滚轮43受到变电站1的摩擦力作用开始转动,滚轮43带动蜗杆44转动,且蜗杆44和蜗轮47相啮合,蜗轮47带动第二转轴45和转动地刷46转动,对地面进行清扫,进而在电动车7移动的过程中能够将二维码42表层的灰尘清扫干净,避免灰尘过多将二维码42遮挡,影响后期扫码器41的扫描。
67.本实施例的基于北斗和5g的电力巡检设备高精度监控系统,包括红外热成像器25、烟雾感应器26、第一距离感应器27、第二距离感应器28、驱动电机30、电动推杆33、扫码器41、子控制中心48、局域wifi49、转动电机22,北斗导航系统、总控制中心,第一距离感应器27和第二距离感应器28、北斗导航系统连接,子控制中心48与电动推杆33、局域wifi49、扫码器41、驱动电机30连接,局域wifi49与转动电机22连接,局域wifi49与红外热成像器25、烟雾感应器26连接,红外热成像器25和烟雾感应器26、子控制中心48连接,且扫码器41与北斗导航系统连接,北斗导航系统和子控制中心48、总控制中心连接。
68.工作原理:多个电动车7进入相应的检测区2中,当电动车7移动至检测区2的过程中滚轮43受到变电站1的摩擦力作用开始转动,滚轮43带动蜗杆44转动,且蜗杆44和蜗轮47相啮合,蜗轮47带动第二转轴45和转动地刷46转动,对地面进行清扫,进而在电动车7移动的过程中能够将二维码42表层的灰尘清扫干净,避免灰尘过多将二维码42遮挡,影响后期扫码器41的扫描,接着电动车7行驶到圆块35和二维码42的正上方,扫码器41对二维码42进行扫描,扫描后将信息传输至北斗导航系统中,显示电动车7移动至相应的检测区2中进行巡检,初步确定电动车7所处的大致区域,通过子控制中心48启动电动推杆33,电动推杆33的输出轴带动梯形块34开始收缩,梯形块34从圆形块32中脱离,第一转轴31和圆形块32开始带动驱动电机30和圆块35向下移动,圆块35刚好能够插入凹槽39中,而销36在弹簧38的弹力作用下插入滑槽37中,圆块35与转动块59开始卡接,在第一转轴31通过自身的重力带动圆块35下移时固定杆55刚好能够卡入固定槽57中,对电动车7进行限位,防止第一转轴31带动转动块59转动时电动车7出现晃动,接着通过子控制中心48启动局域wifi49,通过局域wifi49能够使红外热成像器25、烟雾感应器26和转动电机22与局域wifi49进行wifi连接,通过局域wifi49启动驱动电机30驱动第一转轴31转动,第一转轴31通过圆块35带动转动杆14转动,转动杆14带动不完全齿轮15转动,由于凸块16延伸至环形滑块18中,随着不完全齿轮15的转动凸块16能够带动环形滑块18和齿条60进行往复滑动,进而能够通过第一通孔13带动第一滑杆10沿着矩形通孔9的轨迹进行往复滑动,此时红外热成像器25和烟雾感应器26开始对检测区2上层的电力设备4进行检测,然后通过子控制中心48启动转动电机22,转动电机22驱动第二伞齿轮23转动,且第二伞齿轮23和第一伞齿轮21相啮合,带动螺杆20转动,螺杆20与固定块24螺纹连接,随着螺杆20的转动固定块24向下方滑动,进而红外热成像器25和烟雾感应器26在第一滑杆10的作用下对检测区2中层的电力设备4进行检测,红外热成像器25和烟雾感应器26将检测数据及时传输至子控制中心48处,在红外热成像器25和固定块24检测到存在隐患的电力设备4时,将烟雾感应器26和第二距离感应器28的位置信息及时传输至北斗导航系统中,确定存在隐患电力设备4的精准位置,方便后期检修人员能够通过y轴坐标尺5和x轴坐标尺6精准、快速的找到存在隐患的电力设备4进行检修,随着不完全齿轮15带动第一齿轮17来回往复转动,能够对检测区2上的电力设备4进行检测,当检测
结束后启动电动推杆33,电动推杆33的输出轴推动梯形块34向圆形块32方向移动,梯形块34插入圆形块32中时,能够使第一转轴31和圆形块32带动圆块35向上方移动,此时圆块35和转动块59脱离卡接,接着电动车7继续前进移动至下一个检测区2中,在电动车7从检测区2中离开时,在外界移动,此时通过太阳能电板51能够通过太阳能发电,并将电能储蓄在蓄电池50中,为电动车7、子控制中心48、局域wifi49、驱动电机30和电动推杆33提供能源。
69.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1