三相电流重构方法、装置、设备和存储介质与流程
1.本技术涉及电机控制技术领域,尤其涉及一种三相电流重构方法、装置、设备和存储介质。
背景技术:
2.随着节能降耗技术的积极推广,电机控制的节能技术日益受到重视。例如,变频空调器采用具有损耗小、效率高的永磁同步电机(permanent magnetic synchronous machine,pmsm)。
3.变频器驱动永磁同步电机时,变频器的三相桥式逆变器可以采用svpwm(space vector pulse width modulation,空间矢量脉宽调制)方式控制。svpwm源于交流电动机定子磁链跟踪的思想,易于数字控制器的实现,且输出电流波形好、直流环节电压利用率高等优点。
4.传统的svpwm控制系统中,由于需要测量三相的交流电信号作为反馈,实现电流的闭环控制,即变频器的交流侧需要设置三个电流传感器,导致成本高、结构复杂及体积大,不利于集成化。采用单电流传感器来完成三相电流的重构成为研究的热点。
5.在实际应用中,为了提高三相桥式逆变器的输出电压,以在电机控制中增大电机的最大输出转矩,往往需要采用过调制技术。然而,由于发生过调制现象时,空间矢量落在不可观测区,相关的基于单电流传感器完成三相电流重构的方法难以实现。
技术实现要素:
6.有鉴于此,本技术实施例提供了一种三相电流重构方法、装置、设备和存储介质,旨在满足svpwm控制在单电流传感器采集情形下的三相电流重构。
7.本技术实施例的技术方案是这样实现的:
8.第一方面,本技术实施例提供了一种三相电流重构方法,包括:
9.基于上一脉宽调制(pulse width modulation,pwm)周期的三相电流值计算当前pwm周期的三相占空比;
10.基于所述三相占空比确定所述当前pwm周期进入不可观测区;
11.基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值;
12.其中,所述不可观测区是指所述当前pwm周期内仅能采集到一个非零电压矢量对应的母线电流值。
13.在一些实施方案中,所述基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值之前,所述方法还包括:
14.确定电机为恒转矩控制模式;
15.基于所述上一pwm周期的电机转子的电角度、pwm周期的时长及所述上一pwm周期
的电机转子的电角速度确定所述当前pwm周期的电机转子的电角度。
16.在一些实施方案中,所述基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值,包括:
17.基于所述母线电流值和所述当前pwm周期的电机转子的电角度确定所述当前pwm周期的电流矢量幅值;
18.基于所述当前pwm周期的电流矢量幅值和所述当前pwm周期的电机转子的电角度确定所述母线电流值之外的其余两相的相电流值。
19.在一些实施方案中,所述基于所述三相占空比确定所述当前pwm周期进入不可观测区,包括:
20.基于所述三相占空比和pwm周期的时长确定各相线路的高电平时长;
21.基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区。
22.在一些实施方案中,所述基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区,包括以下之一:
23.确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且所述pwm周期的时长与所述中间相的高电平时长之差小于所述最小采样时长;
24.确定最大相的高电平时长与中间相的高电平时长之差大于或等于所述最小采样时长且所述中间相的高电平时长及最小相的高电平时长均小于所述最小采样时长;
25.确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且所述pwm周期的时长与所述中间相的高电平时长之差大于或等于所述最小采样时长;
26.其中,所述最大相为三相线路中占空比最大的相,所述最小相为三相线路中占空比最小的相为最小相,所述中间相为三相线路中占空比位于中间的相。
27.第二方面,本技术实施例提供了一种三相电流重构装置,包括:
28.占空比计算模块,用于基于上一pwm周期的三相电流值计算当前pwm周期的三相占空比;
29.确定模块,用于基于所述三相占空比确定所述当前pwm周期进入不可观测区;
30.电流重构模块,用于基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值;
31.其中,所述不可观测区是指所述当前pwm周期内仅能采集到一个非零电压矢量对应的母线电流值。
32.在一些实施方案中,所述确定模块还用于:
33.确定电机为恒转矩控制模式;
34.基于所述上一pwm周期的电机转子的电角度、pwm周期的时长及所述上一pwm周期的电机转子的电角速度确定所述当前pwm周期的电机转子的电角度。
35.在一些实施方案中,所述电流重构模块具体用于:
36.基于所述母线电流值和所述当前pwm周期的电机转子的电角度确定所述当前pwm周期的电流矢量幅值;
37.基于所述当前pwm周期的电流矢量幅值和所述当前pwm周期的电机转子的电角度确定所述母线电流值之外的其余两相的相电流值。
38.在一些实施方案中,所述确定模块具体用于:
39.基于所述三相占空比和pwm周期的时长确定各相线路的高电平时长;
40.基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区。
41.在一些实施方案中,所述确定模块基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区,包括以下之一:
42.确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且所述pwm周期的时长与所述中间相的高电平时长之差小于所述最小采样时长;
43.确定最大相的高电平时长与中间相的高电平时长之差大于或等于所述最小采样时长且所述中间相的高电平时长及最小相的高电平时长均小于所述最小采样时长;
44.确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且所述pwm周期的时长与所述中间相的高电平时长之差大于或等于所述最小采样时长;
45.其中,所述最大相为三相线路中占空比最大的相,所述最小相为三相线路中占空比最小的相为最小相,所述中间相为三相线路中占空比位于中间的相。
46.第三方面,本技术实施例提供了一种三相电流重构设备,包括:处理器和用于存储能够在处理器上运行的计算机程序的存储器,其中,
47.所述处理器,用于运行计算机程序时,执行本技术实施例所述方法的步骤。
48.在一些实施方案中,该三相电流重构设备还包括:母线电流采集装置,用于获取母线电流的采样值,并发送所述采样值给所述处理器。
49.第四方面,本技术实施例提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时,实现本技术实施例所述方法的步骤。
50.本技术实施例提供的技术方案,基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值,可以实现空间矢量落在不可观测区时,基于母线电流的采样值实现三相电流重构,尤其是在过调制区,可以在满足有效电压矢量的基础上,实现三相电流重构,进而可以在母线电压不变的情形下,增大电机的输出转矩,提高电源电压利用率。
附图说明
51.图1为应用本技术实施例三相电流重构方法的系统的结构示意图;
52.图2为空间电压矢量的分布示意图;
53.图3为本技术实施例中空间电压矢量不可观测区的原理示意图;
54.图4为相关技术中基于移相处理的原理示意图;
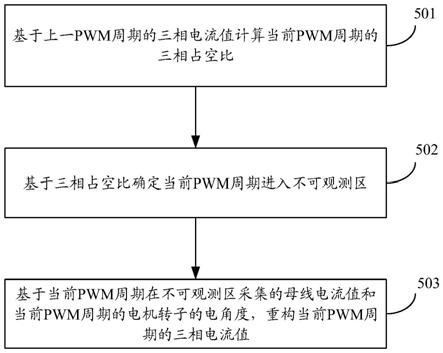
55.图5为本技术实施例三相电流重构方法的流程示意图;
56.图6为本技术实施例电机控制中载波和调制的关系示意图;
57.图7为本技术一应用示例三相电流重构方法的流程示意图;
58.图8为本技术实施例三相电流重构装置的结构示意图;
59.图9为本技术实施例三相电流重构设备的结构示意图。
具体实施方式
60.下面结合附图及实施例对本技术再作进一步详细的描述。
61.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
62.在对本技术实施例三相电流重构方法进行说明之前,先对应用该三相电流重构方法的系统进行示例性地说明。
63.如图1所示,该系统包括:电机m、三相桥式逆变器101、直流电源dc及母线电流采集装置102。
64.示例性地,直流电源dc的正极与负极之间还连接电容c1。直流电源dc供应的直流电经三相桥式逆变器101转换为电机m的三相电源,该电机m可以为pmsm。该三相桥式逆变器101可以由变频器采用svpwm方式控制。其中,母线电流采集装置102可以采用典型的单电阻采样电路,例如,包括接入至直流电源dc的负极与三相桥式逆变器101之间的电阻r1,电阻r1的两端电压经运算放大器传递至ad转换电路,由ad转换电路转换生成母线电流,该母线电流用于后续的三相电流重构,进而将重构的三相交流电流作为反馈以实现电流的闭环控制。
65.可以理解的是,三相桥式逆变器采用svpwm调制方式控制,有8种开关工作状态,包括6个非零电压矢量(v1‑
v6)和2个零电压矢量(v0和v7),其将电压空间平面分成六边形如图2所示。相电流重构的基本原理是利用1个pwm周期内在不同的时刻采样的母线电流,得到各个相电流。直流母线的电流与三相电流的关系由瞬时开关量的状态决定,关系如表1所示。
66.表1
67.电压矢量相电流电压矢量相电流v1i
c
v5‑
i
b
v2i
b
v6‑
i
c
v3‑
i
a
v00v4i
a
v
7068.在实际应用中,考虑到母线电流的采样需满足采样窗口,即要求非零电压矢量必须持续1个最小采样时长t
min
,t
min
=t
d
+t
set
+t
ad
,其中,t
d
表示上下桥臂的死区时长,t
set
表示母线电流建立时长,t
ad
表示采样转换时长。
69.如图3所示,当输出的电压矢量处于低调制区或非零电压矢量附近时,在1个pwm周期内可能存在非零电压矢量的持续时长小于t
min
的情况。这种情况使采样的母线电流毫无意义。本技术实施例中,将在一个pwm周期内不能采样到两相不同相电流(即两个非零电压矢量对应的母线直流)的区域统称为不可观测区。
70.相关技术中,为了保证每个pwm周期可以采样到两相相电流,需要在不可观测区通过移相处理,保证一个pwm周期内采样到两相相电流。例如,如图4所示,示例性地,三相线路包括:a相、b相及c相线路,原有的t1的采样窗口小于t
min
,将通过移相处理,将b相的高电平右移t
shift
,可以使得移相后的t1的采样窗口等于t
min
。
71.当不可观测区为过调制区域时,例如,图3所示的六边形的内切圆之外的区域,会出现移相移出pwm周期导致不能满足有效矢量电压的问题,然而,如果为了保证矢量电压的
pwm周期,则会出现无法提供采样窗口的情况,导致无法在一个pwm周期内采集到两相相电流,因此,相关的基于移相处理的三相电流重构的方法无法满足过调制区的三相电流的重构要求。
72.基于此,本技术各种实施例中,提出了一种能够适应过调制区的三相电流重构方法,从而可以在过调制区基于母线电流实现三相电流重构。
73.如图5所示,本技术实施例三相电流重构方法,包括:
74.步骤501,基于上一pwm周期的三相电流值计算当前pwm周期的三相占空比。
75.示例性地,三相占空比的计算过程如下:
76.1)、获取上一pwm周期的三相电流值ia、ib、ic,其中,ia为a相线路对应的相电流,ib为b相线路对应的相电流,ic为c相线路对应的相电流;
77.2)、通过速度位置估算模块确定电机转子的磁场角度θ和速度ω;
78.3)、对三相电流值ia、ib、ic通过clark(克拉克)变换及park(派克)变换得到id、iq,其中,clark变换用于将abc三轴坐标系变换到静止的αβ坐标系,park变换用于将静止的αβ坐标系转换为旋转的dq坐标系,id为转换后的d轴的电流值,iq为转换后的q轴的电流值;
79.4)、基于电机转子的磁场角度θ和速度ω转换得到d轴和q轴的给定电流值,基于该给定电流值和步骤3)中得到的id、iq,通过pid(比例积分微分)运算,得到vd、vq,其中,vd为d轴的调制电压,vq为q轴的调制电压;
80.5)、对vd、vq通过逆park变换,得到vα、vβ,其中,vα为α轴的调制电压,vβ为β轴的调制电压;
81.6)、对vα、vβ通过sv矢量运算,得到va、vb、vc,其中,va为a轴的调制电压,vb为a轴的调制电压,vc为a轴的调制电压;
82.7)、通过母线电压以及得到va、vb、vc计算出三相占空比duty
a
、duty
b
、duty
c
,其中,duty
a
为a相的占空比,duty
b
为b相的占空比,duty
c
为c相的占空比。
83.步骤502,基于三相占空比确定当前pwm周期进入不可观测区。
84.步骤503,基于当前pwm周期在不可观测区采集的母线电流值和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值。
85.这里,不可观测区是指当前pwm周期内仅能采集到一个非零电压矢量对应的母线电流值,即在一个pwm周期内不能采样到两相不同的相电流,导致无法完成当前pwm周期的三相电流的重构。
86.本技术实施例中,基于当前pwm周期在不可观测区采集的母线电流值和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值,可以实现空间矢量落在不可观测区时,基于母线电流的采样值实现三相电流重构,尤其是在过调制区,可以在满足有效电压矢量的基础上,实现三相电流重构,进而可以在母线电压不变的情形下,增大电机的输出转矩,提高电源电压利用率。
87.在一些实施例中,基于当前pwm周期在不可观测区采集的母线电流值和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值之前,方法还包括:
88.确定电机为恒转矩控制模式;
89.基于上一pwm周期的电机转子的电角度、pwm周期的时长及上一pwm周期的电机转子的电角速度确定当前pwm周期的电机转子的电角度。
90.可以理解的是,当电机运行至不可观测区,电机转子的转速高于额定转速,若电机为恒转矩控制模式,则可以认为两个pwm周期内电机运行的转矩及转速不变,从而可以根据上一pwm周期的电机转子的电角速度(又称为电频率)和电角度计算当前pwm周期的电角度。
91.这里,电机转子的电角度与电机的极对数有关,如果,电机是一对极,则电机一周是360
°
电角度;电机是两对极,则电机一周为720
°
电角度;电机是三对极,则电机一周1080
°
电角度,依此类推。假定电机的极对数为p,电机的总电角度=360
°
*p。可以理解的是,电机的电角速度=角速度*p。
92.示例性地,如图6所示,计算当前pwm周期的电角度的公式如下:
93.θ2=θ1+(ts*fs)/2π
94.其中,θ1为上一pwm周期的电角度,θ2为当前pwm周期的电角度,ts为pwm周期的时长,fs为上一pwm周期的电角速度。
95.如此,可以基于假定电机转速不变的原则计算出当前pwm周期的电角度。
96.在一些实施例中,基于当前pwm周期在不可观测区采集的母线电流值和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值,包括:
97.基于母线电流值和当前pwm周期的电机转子的电角度确定当前pwm周期的电流矢量幅值;
98.基于当前pwm周期的电流矢量幅值和当前pwm周期的电机转子的电角度确定母线电流值之外的其余两相的相电流值。
99.可以理解的是,在不可观测区,可以基于母线电流采集装置102采集到一个非零电压矢量对应的母线电流值,并可以基于如表1所示的关系确定该母线电流值与相电流的对应关系。
100.再基于如下所示的三相电流的计算公式,可以确定当前pwm周期的电流矢量幅值:
[0101][0102]
其中,i
m
为电流矢量幅值,i
a
为a相电流值,i
b
为b相电流值,i
c
为c相电流值,θ为电角度。
[0103]
例如,假定母线电流值对应a相电流值,则可以基于i
a
和θ换算得到i
m
,再基于i
m
和θ,计算得到i
b
和i
c
,从而实现三相电流的重构。
[0104]
在一些实施例中,基于三相占空比确定当前pwm周期进入不可观测区,包括:
[0105]
基于三相占空比和pwm周期的时长确定各相线路的高电平时长;
[0106]
基于各相线路的高电平时长、pwm周期的时长和母线电流的最小采样时长确定当前pwm周期进入不可观测区。
[0107]
示例性地,假定tp为pwm周期的时长,则a相的高电平时长ta=tp*duty
a
,b相的高电平时长tb=tp*duty
b
,c相的高电平时长tc=tp*duty
c
。
[0108]
示例性地,基于各相线路的高电平时长、pwm周期的时长和母线电流的最小采样时长确定当前pwm周期进入不可观测区,包括以下之一:
[0109]
确定最大相的高电平时长与中间相的高电平时长之差小于最小采样时长且pwm周
期的时长与中间相的高电平时长之差小于最小采样时长;
[0110]
确定最大相的高电平时长与中间相的高电平时长之差大于或等于最小采样时长且中间相的高电平时长及最小相的高电平时长均小于最小采样时长;
[0111]
确定最大相的高电平时长与中间相的高电平时长之差小于最小采样时长且pwm周期的时长与中间相的高电平时长之差大于或等于最小采样时长;
[0112]
其中,最大相为三相线路中占空比最大的相,最小相为三相线路中占空比最小的相为最小相,中间相为三相线路中占空比位于中间的相。
[0113]
可以理解的是,当最大相的高电平时长与中间相的高电平时长之差小于最小采样时长且pwm周期的时长与中间相的高电平时长之差小于最小采样时长时,三相占空比中存在两相占空比均较大的情形;当最大相的高电平时长与中间相的高电平时长之差大于或等于最小采样时长且中间相的高电平时长及最小相的高电平时长均小于最小采样时长时,三相占空比中存在两相占空比均较小的情形,此时无法通过移相处理实现两相电流的采集。基于本技术实施例的方法,可以不用采集两相电流,而是基于采集的母线电流值(对应一相电流值)和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值,从而实现电机的矢量控制。
[0114]
可以理解的是,当最大相的高电平时长与中间相的高电平时长之差小于最小采样时长且pwm周期的时长与中间相的高电平时长之差大于或等于最小采样时长时,可以基于对中间相进行移相处理,从而在pwm周期内采样到两相相电流,实现三相电流的重构,亦可以基于本技术实施例的方法实现三相电流的重构,本技术实施例对此不做限定。
[0115]
下面结合一应用示例对本技术实施例的三相电流重构方法进行举例说明。
[0116]
如图7所示,该三相电流重构方法可以包括:
[0117]
步骤701,计算当前pwm周期的三相占空比和采样窗口的大小。
[0118]
示例性地,可以基于上一pwm周期的三相电流值计算当前pwm周期的三相占空比,具体可以参照前述的描述,在此不再赘述。
[0119]
这里,采样窗口的大小即非零电压矢量必须持续的最小采样时长t
min
,t
min
=t
d
+t
set
+t
ad
,其中,t
d
表示上下桥臂的死区时长,t
set
表示母线电流建立时长,t
ad
表示采样转换时长。
[0120]
步骤702,判断是否进入不可观测区,若是,则执行步骤704,然后执行步骤705;若否,则执行步骤703,然后执行步骤705。
[0121]
示例性地,可以基于三相占空比和pwm周期的时长确定各相线路的高电平时长;再基于各相线路的高电平时长、pwm周期的时长和母线电流的最小采样时长判断当前pwm周期是否进入不可观测区。
[0122]
步骤703,正常三相电流重构。
[0123]
若确定当前pwm周期未进入不可观测区,则可以正常采集两相电流,从而得到三相电流。
[0124]
步骤704,基于当前pwm周期在不可观测区采集的母线电流值和当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值。
[0125]
若确定当前pwm周期进入不可观测区,则可以基于本技术实施例的方法重构当前pwm周期的三相电流值,具体可以参照前述描述,在此不再赘述。
[0126]
步骤705,电机矢量运算控制。
[0127]
可以基于当前pwm周期的三相电流值,进行电机矢量运算控制,例如,基于svpwm方式对电机进行控制。
[0128]
可以理解的是,本应用示例中,对于电压矢量在过调制区域时,可以通过在仅采集一相电流值的前提下,基于当前pwm周期的电机转子的电角度,重构当前pwm周期的三相电流值,从而可以满足过调制区基于母线电流实现三相电流重构的需求,进而可以在母线电压不变的情形下,增大电机的输出转矩,提高电源电压利用率。
[0129]
为了实现本技术实施例的方法,本技术实施例还提供一种三相电流重构装置,该三相电流重构装置与上述三相电流重构方法对应,上述三相电流重构方法实施例中的各步骤也完全适用于本三相电流重构装置实施例。
[0130]
如图8所示,该三相电流重构装置包括:占空比计算模块801、确定模块802及电流重构模块803。
[0131]
占空比计算模块801用于基于上一pwm周期的三相电流值计算当前pwm周期的三相占空比;
[0132]
确定模块802用于基于所述三相占空比确定所述当前pwm周期进入不可观测区;
[0133]
电流重构模块803用于基于所述当前pwm周期在所述不可观测区采集的母线电流值和所述当前pwm周期的电机转子的电角度,重构所述当前pwm周期的三相电流值;
[0134]
其中,所述不可观测区是指所述当前pwm周期内仅能采集到一个非零电压矢量对应的母线电流值。
[0135]
在一些实施例中,确定模块802还用于:
[0136]
确定电机为恒转矩控制模式;
[0137]
基于所述上一pwm周期的电机转子的电角度、pwm周期的时长及所述上一pwm周期的电机转子的电角速度确定所述当前pwm周期的电机转子的电角度。
[0138]
在一些实施例中,电流重构模块803具体用于:
[0139]
基于所述母线电流值和所述当前pwm周期的电机转子的电角度确定所述当前pwm周期的电流矢量幅值;
[0140]
基于所述当前pwm周期的电流矢量幅值和所述当前pwm周期的电机转子的电角度确定所述母线电流值之外的其余两相的相电流值。
[0141]
在一些实施例中,所述确定模块802具体用于:
[0142]
基于所述三相占空比和pwm周期的时长确定各相线路的高电平时长;
[0143]
基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区。
[0144]
在一些实施方案中,所述确定模块802基于各相线路的高电平时长、所述pwm周期的时长和母线电流的最小采样时长确定所述当前pwm周期进入不可观测区,包括以下之一:
[0145]
确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且所述pwm周期的时长与所述中间相的高电平时长之差小于所述最小采样时长;
[0146]
确定最大相的高电平时长与中间相的高电平时长之差大于或等于所述最小采样时长且所述中间相的高电平时长及最小相的高电平时长均小于所述最小采样时长;
[0147]
确定最大相的高电平时长与中间相的高电平时长之差小于所述最小采样时长且
device)、现场可编程逻辑门阵列(fpga,field programmable gate array)、通用处理器、控制器、微控制器(mcu,micro controller unit)、微处理器(microprocessor)、或者其他电子元件实现,用于执行前述方法。
[0158]
可以理解,存储器902可以是易失性存储器或非易失性存储器,也可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(rom,read only memory)、可编程只读存储器(prom,programmable read
‑
only memory)、可擦除可编程只读存储器(eprom,erasable programmable read
‑
only memory)、电可擦除可编程只读存储器(eeprom,electrically erasable programmable read
‑
only memory)、磁性随机存取存储器(fram,ferromagnetic random access memory)、快闪存储器(flash memory)、磁表面存储器、光盘、或只读光盘(cd
‑
rom,compact disc read
‑
only memory);磁表面存储器可以是磁盘存储器或磁带存储器。易失性存储器可以是随机存取存储器(ram,random access memory),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的ram可用,例如静态随机存取存储器(sram,static random access memory)、同步静态随机存取存储器(ssram,synchronous static random access memory)、动态随机存取存储器(dram,dynamic random access memory)、同步动态随机存取存储器(sdram,synchronous dynamic random access memory)、双倍数据速率同步动态随机存取存储器(ddrsdram,double data rate synchronous dynamic random access memory)、增强型同步动态随机存取存储器(esdram,enhanced synchronous dynamic random access memory)、同步连接动态随机存取存储器(sldram,synclink dynamic random access memory)、直接内存总线随机存取存储器(drram,direct rambus random access memory)。本技术实施例描述的存储器旨在包括但不限于这些和任意其它适合类型的存储器。
[0159]
在示例性实施例中,本技术实施例还提供了一种存储介质,即计算机存储介质,具体可以是计算机可读存储介质,例如包括存储计算机程序的存储器902,上述计算机程序可由三相电流重构设备的处理器901执行,以完成本技术实施例方法所述的步骤。计算机可读存储介质可以是rom、prom、eprom、eeprom、flash memory、磁表面存储器、光盘、或cd
‑
rom等存储器。
[0160]
需要说明的是:“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
[0161]
另外,本技术实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。
[0162]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术披露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1