一种基于抗饱和准谐振控制器的LC型变换器限流控制系统
一种基于抗饱和准谐振控制器的lc型变换器限流控制系统
技术领域
1.本发明属于电源领域,更具体地,涉及一种基于抗饱和准谐振控制器的lc型变换器限流控制系统。
背景技术:
2.在大型通讯系统及医疗设备等应用场合,通常需要配备不间断电源(uninterrupted power supply,简称ups)以保障供电的可靠性,同时改善波形的电能质量,因此,不间断电源已成为业界重要的电力装备之一。这类不间断电源的核心单元是lc型变换器,当市电中断时,lc型变换器将直流电(在ups中是由蓄电池提供直流电)转换为恒压恒频的交流电,从而实现对负载不间断供电。随着用户需求不断增大,对lc型变换器的控制性能要求也越来越高,特别是应对复杂的负载工况,例如过载或者直接短路等,这些极端场合易出现lc型变换器的输出电流突增而直接损坏功率器件,从而造成不必要的经济损失。
3.针对lc型变换器的过载或短路故障问题,主要有三种解决方案,包括硬件检测方法、软件控制方法以及硬件和软件结合的控制方法。采用硬件检测方法是通过调理电路检测出电感电流或者直流侧电流,当检测的电感电流或直流侧电流大于预设定值时,则直接关闭驱动信号,从而实现保护功率器件的目的。这种方法虽然简单,但故障清除后不能自动恢复输出电压,同时增加了额外硬件检测电路。为了能自动恢复输出电压,有文献采用软件控制方法,即采用双环控制结构(外环为电压环,内环为电流环)。在外环的输出端接入一个限幅器,限制滤波电感电流的指令值,从而调整lc型变换器的电感电流大小。这种方法虽然可以实现自动恢复输出电压且限制电感电流大小,但是无法兼顾当故障清除后快速恢复输出电压,同时电感电流指令值是严重的消顶波形,导致lc型变换器的电感电流波形质量也不佳。最后一种控制方法是利用硬软件结合方式,具体实现步骤是当短路故障时,先让硬件工作以限制电感电流突增,当电感电流限制到一定时,软件控制开始起作用,最终调整电感电流至预期值,从而保证功率器件不被损坏。这类方法尽管已广泛采用,但增加了额外硬件成本,且故障清除后输出电压易出现过压现象,从而触发硬件保护。
4.因此,受制于现有控制方案的不足,lc型变换器无法保证过载或短路故障清除情况下快速恢复输出电压到额定值,且由于常规控制方案中电感电流指令值是严重的消顶波形,导致lc型变换器的电感电流波形质量也不佳。故有必要提出更适合的lc型变换器限流控制系统,以适应未来高标准的电能需求。
技术实现要素:
5.针对现有技术的缺陷和改进需求,本发明提供了一种基于抗饱和准谐振控制器的lc型变换器限流控制系统,其目的在于解决现有技术中由于lc型变换器在过载或短路故障过程中限流波形质量差,以及在过载或短路故障清除后输出电压恢复速度慢的问题,导致在实际应用中(例如:不间断电源)无法及时给负载提供高质量的电能。
6.为实现上述目的,按照本发明的一个方面,提供了一种基于抗饱和准谐振控制器
的lc型变换器限流控制系统,包括:第一加法器、电压外环控制器、第五加法器和电流内环控制器;第一加法器的第一输入端用于接收输出电压给定量,第一加法器的第二输入端用于接收lc型变换器的输出电压,第一加法器的输出端用于将输出电压给定量与lc型变换器的输出电压相减得到输出电压误差量;电压外环控制器的输入端连接至第一加法器的输出端,所述电压外环控制器用于调节所述输出电压误差量;所述第五加法器的第一输入端连接至所述电压外环控制器的输出端,第五加法器的第二输入端用于接收lc型变换器的电感电流,第五加法器用于将电感电流指令值与所述lc型变换器的电感电流相减得到电感电流误差量;电流内环控制器的输入端连接至第五加法器的输出端,电流内环控制器用于调节所述电感电流误差量。
7.更进一步地,电压外环控制器包括:第一控制器、第三加法器和抗饱和准谐振控制器;第一控制器的输入端作为所述电压外环控制器的输入端,第一控制器用于接收所述输出电压误差量;第三加法器的第一输入端连接至第一控制器的输出端,第三加法器的第二输入端连接至所述抗饱和准谐振控制器的输出端,第三加法器的输出端作为所述电压外环控制器的输出端,第三加法器用于得到电感电流指令值;抗饱和准谐振控制器的输入端连接至第一加法器的输出端,抗饱和准谐振控制器用于调节所述lc型变换器的输出电压以及所述电感电流指令值。
8.更进一步地,抗饱和准谐振控制器包括:第二加法器、第二控制器、第三控制器、第四加法器和限幅器;第二加法器的第一输入端作为抗饱和准谐振控制器的输入端,第二加法器的第二输入端连接至第三控制器的输出端,第二加法器用于将输出电压误差量与第三控制器输出量相减得到输出电压校正后误差量;第二控制器的输入端连接至第二加法器的输出端,第二控制器用于调节所述输出电压校正后误差量;限幅器的输入端连接至第二控制器的输出端,限幅器的输出端作为所述抗饱和准谐振控制器的输出端,限幅器用于将所述第二控制器输出量进行幅值限制;第四加法器的第一输入端连接至限幅器的输出端,第四加法器的第二输入端连接至第二控制器的输出端,第四加法器用于将第二控制器输出量与限幅器输出量相减得到限幅器误差量;第三控制器的输入端连接至第四加法器的输出端,第三控制器用于调节所述限幅器误差量。
9.相比于仅包含限幅器的传统抗饱和准谐振控制器结构,本发明实施例提供的抗饱和准谐振控制器的控制结构中通过引入第三控制器、所述第四加法器和限幅器后有更大的调控自由度,使得抗饱和控制器能够解决在负载过载或短路等工况下的限流及输出电压快速恢复问题。
10.具体而言,抗饱和准谐振控制器具备当负载过载或短路故障清除时,能够使得所述lc型变换器限流控制系统中电压外环快速起到调节作用,从而能及时调控所述lc型变换器的输出电压,避免了所述lc型变换器的输出电压超调量过大情况。与此同时,所述抗饱和准谐振控制器中含有限幅器,使得所述lc型变换器电感电流的指令值也是可调控的,故可间接调节所述lc型变换器电感电流的大小。
11.更进一步地,第一控制器和第三控制器均为比例形式,其表达式分别为k
up
和k
wind
;第二控制器为准谐振控制器g
ur
,其表达式为k
ur
s/(s2+2ω
c1
s+ω
02
),其中,k
ur
为所述第二控制器对应的准谐振控制器系数,s为拉普拉斯算子,ω
c1
为准谐振控制器的带宽,为减少基波频率偏移带来的影响,通常取为1%的基波角频率,ω0为基波角频率。
12.更进一步地,电流内环控制器包括:第四控制器;第四控制器的输入端连接至第五加法器的输出端,第四控制器的输出端用于连接lc型变换器,输出调制信号使得所述lc型变换器的输出电压跟随所述输出电压给定量的变化。
13.其中,第四控制器为准比例谐振控制器gi,其表达式为k
ip
+k
ir
s/(s2+2ω
c1
s+ω
02
),k
ip
为第四控制器对应的比例系数,k
ir
为第四控制器对应的准谐振控制器系数。
14.更进一步地,限幅器的输出最大值为i
lmax*
=i
llimref-k
upuomax*
,输出最小值为i
lmin*
=-(i
llimref-k
upuomax*
);其中,i
llimref
为lc型变换器的预期最大电感电流峰值,u
omax*
为输出电压给定值的峰值,k
up
为第一控制器的比例系数。
15.工作时,通过第一控制器、第一加法器、抗饱和准谐振控制器、第三加法器、第五加法器和第四控制器的协同控制作用,在短路故障或过载情况下限制lc型变换器的电感电流增大,在短路故障或过载清除情况下快速恢复lc型变换器的输出电压到达输出电压给定量。
16.更进一步地,控制系统中闭环主导极点且协同调节控制系统中的各个控制器参数为:
17.k
up
=(lω
n2
c-1)/(2lξω
n-r)
18.k
ur
=2.2k
up
/(n1t0)
19.k
ip
=(2lξω
n-r)/k
pwm
20.k
ii
=2.2k
ip
/(n2t0)
21.k
wind
=(2lξω
n-r)/(lω
n2
c-1)
22.i
lmax*
=i
llimref-k
upuomax*
23.i
lmin*
=-(i
llimref-k
upuomax*
)
24.其中,ξ为系统期望的阻尼比,ωn为系统期望的自然角频率,l为lc型变换器的滤波电感,c为lc型变换器的滤波电容,r为滤波电感的等效寄生电阻,k
pwm
为lc型变换器的等效增益系数,t0为系统的基波周期,n1为系统的电压外环基波频率处动态响应的预期基波周期倍数因子,n2为系统的电流内环基波频率处动态响应的预期基波周期倍数因子,i
llimref
为lc型变换器的预期最大电感电流峰值,u
omax*
为输出电压给定值的峰值。
25.总体而言,通过本发明所构思的以上技术方案,能够取得以下有益效果:
26.(1)该限流控制系统在过载或短路故障情况下考虑电压外环的谐振控制器中积分环节易出现饱和现象,从而导致了电压外环失效,因此提出一种基于抗饱和准谐振控制器的双环控制结构,使得当过载或短路故障清除时电压外环能快速起到调节作用,从而解决了常规方案中输出电压快速响应慢的难题。
27.(2)该限流控制系统中抗饱和准谐振控制器环节含有限幅器,使得电感电流的指令值也是可调控的,故可间接调节lc型变换器电感电流的大小,从而可实现在过载或短路故障工况中限制电感电流在预期范围内,克服了功率器件易被损坏的问题。
28.(3)由于该限流控制系统并没有利用负载电流的信息,因而不仅可以节省体积成本,而且能够适用于过载、甚至短路故障等多种工况,从而显著提高了lc型变换器的带载能力。此外,在短路故障工况清除后输出电压能够快速恢复供电,因而提高供电的可靠性。
29.(4)该限流控制系统结合了极点配置及限流约束条件的参数设计方法,故能获得
电压外环控制器及电流内环控制器的所有控制器参数,方便实际工程应用。
附图说明
30.图1为本发明实施例提出的一种基于抗饱和准谐振控制器的lc型变换器限流控制系统的示意图;
31.图2为lc型变换器的主电路图;
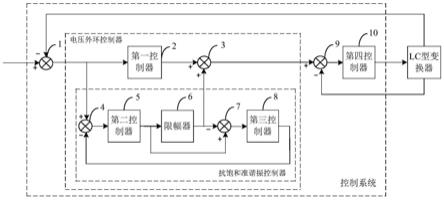
32.图3为本发明实施例提出的一种基于抗饱和准谐振控制器的lc型变换器限流控制系统的方框图;
33.图4为图3所示系统中抗饱和准谐振控制器的具体方框图;
34.图5为lc型变换器在过载工况下输出电压及电感电流的动态仿真波形图;
35.图6为lc型变换器在短路故障下输出电压及电感电流的动态仿真波形图。
具体实施方式
36.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
37.在本发明中,本发明及附图中的术语“第一”、“第二”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。
38.本发明针对lc型变换器在过载或短路故障情况下,因电感电流过大导致功率开关器件出现损坏问题,以及在过载或短路故障清除后输出电压无法及时恢复问题。进而提出了一种基于抗饱和准谐振控制器的lc型变换器限流控制系统。在此基础上,对该限流控制系统的所有控制器进行参数设计,实现在过载及短路故障情况下能限制电感电流增大,从而保护功率器件不被损坏。同时保证在过载或短路故障清除后输出电压能够快速恢复,提高供电的可靠性。
39.参阅图1,结合图2-图4,对本发明实施例提供的基于抗饱和准谐振控制器的lc型变换器限流控制系统进一步地阐述。限流控制系统包括第一加法器、第二加法器、第三加法器、第四加法器、第五加法器、第一控制器、第二控制器、第三控制器、第四控制器和限幅器。
40.如图1所示,给出的是lc型变换器限流控制系统的示意图。其具体实施步骤如下:首先,从lc型变换器中检测出被控量的输出电压以及电感电流。其次,将输出电压给定量和检测得到的输出电压xo比较后的误差量送入到第一控制器的输入端,同时送入到第二加法器的第一输入端。然后,第二加法器的输出端送入到第二控制器的输入端,第三控制器的输出端送入到第二加法器的第二输入端,第二控制器的输出端送入到限幅器的输入端,同时送入到第四加法器的第二输入端,限幅器的输出端送入至第四加法器的第一输入端,同时送入到第三加法器的第二输入端,第四加法器的输出端送入至第三控制器的输入端,第一控制器的输出端送入至第三加法器的第一输入端,第三加法器的输出端得到电感电流指令值,该电感电流指令值与电感电流的相减得到电感电流误差量,并送入至第四控制器的输入端,第四控制器的输出端为调制信号。最后,通过脉宽调制方式产生驱动信号并连接至lc型变换器,以控制lc变换器,使得lc型变换器的输出电压uo跟随输出电压给定量的变
化。该限流控制系统具备在过载或短路故障情况下限流电感电流增大,同时过载或短路故障清除情况下输出电压能快速恢复到额定值。
41.图2给出了lc型变换器的主电路图。参阅图2,u
dc
为直流侧电压,u
inv
为lc型变换器的输出电压,i
l
为变换器侧电感电流,l为变换器侧电感,r为变换器侧等效串联电阻,c为滤波电容,ic为滤波电容电流,z
l
为负载阻抗,uo,为输出电压(即负载电压),io为负载电流。利用kcl及kvl定理,可得到lc型变换器在时域下电路方程表达式为:
[0042][0043][0044]
将式(1)进行拉普拉斯变换,并忽略各个物理量的初始状态,可得到lc型变换器频域下输出电压到变换器侧输出电压及负载电流之间关系为:
[0045][0046]
其中,s为拉普拉斯算子。此外,考虑变换器侧输出电压是由调制波通过脉宽调制得到,因此存在等效增益环节k
pwm
。结合式(2)可进一步有:
[0047][0048]
其中,uc为调制波信号,io作为一个负载电流的扰动信号,为方便后续推导闭环传递函数,这里进行了忽略扰动信号的影响。
[0049]
图3示出了基于抗饱和准谐振控制器的lc型变换器限流控制系统的方框图,采用的是一种基于抗饱和准谐振控制器的双环控制结构。其中,电压外环控制器用于调节输出电压达到预期输出电压值,电流内环控制器用于改善系统阻尼及调节电感电流的大小。值得一提的是,在常规双环控制结构中限幅器放置到电流内环的输入侧,当短路故障或者过载时,易导致电压外环失效。特别地,当短路故障或过载清除时,无法及时调节输出电压,导致在短路故障或过载清除时输出电压瞬间出现过冲,引起机器保护。不同于常规双环控制结构,本发明是将限幅器移至电压外环的准谐振控制器中,进而构成一种抗饱和准谐振控制器,使得电压外环在短路故障或过载清除时快速恢复调节的能力。
[0050]
为方便设计本发明的限流控制系统中所有控制器参数,电压外环控制器及电流内环控制器先均假设为比例控制器,且分别为k
up
及k
ip
。结合式(3),可推导出限流控制系统的闭环传递函数为:
[0051][0052]
当期望配置的闭环主导极点我即期望的闭环特征方程为:
[0053]dcl
=lc(s2+ξωns+ω
n2
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0054]
其中,ξ为系统期望的阻尼比,ωn为系统期望的自然角频率。利用待定系数法,可
得
[0055][0056]
整理式(6)可以得到电压外环控制器及电流内环控制器的比例系数k
up
及k
ip
分别为:
[0057][0058]
为进一步设计电流内环控制器中准谐振控制器系数,这里写出对应的准比例谐振控制器gi完整表达式为:
[0059][0060]
其中,ω
c1
为准谐振控制器的带宽,为减少基波频率偏移带来的影响,通常取为1%的基波角频率,即ω
c1
=1%
·
2π
·
50≈3rad/s。ω0为基波角频率,即ω0=314rad/s。k
ir
为电流内环控制器中准谐振控制器的谐振系数。
[0061]
当电流内环穿越角频率为f2时,且通常f2一般远大于基波频率,此时可以推导出电流内环控制器的准谐振系数k
ir
和比例系数k
ip
存在的近似关系为:
[0062]kir
=k
ip
f2=k
ip
/(n2t0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0063]
其中,t0为基波周期,n2为电流内环基波频率处响应的预期基波周期倍数因子。类似地,当电压外环穿越角频率为f1时,且通常f1一般远大于基波角频率时,可推导出电压外环控制器的准谐振控制器系数k
ur
和比例系数k
up
存在的近似关系为:
[0064]kur
=k
up
f1=k
up
/(n1t0)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0065]
其中,n1为电压外环基波频率处响应的预期基波周期倍数因子。此外,电压外环的准谐振控制器表达式为g
ur
=k
ur
s/(s2+2ω
c1
s+ω
02
),式中各个物理量定义和电流内环的准谐振控制器类似,故不赘述。
[0066]
此外,n1t0及n2t0可近似反映出外环和内环的基波频率处响应时间,本发明推荐n1和n2取值可选择范围为0.01到1。值得一提的是,这里选择基波频率处响应时间是以基波周期倍数为单位,基波频率处最大响应时间值选择以1倍的基波周期,而基波频率处最小响应时间值选择0.01倍的基波周期,以满足实际场合不同需求。
[0067]
图4中示出了抗饱和准谐振控制器的具体方框图。参阅图4,包含比例控制器k
up
、准谐振控制器g
ur
、限幅器及抗饱和系数k
wind
,从图4中可以看出谐振控制器中包含了多个积分环节。当负载出现短路故障时,此时lc型变换器的输出电压为0,故可得输出电压误差变为
[0068]eo
=u
o*
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0069]
由上式(11)可知,由于输出电压误差达到最大,当通过准谐振控制器环节后,电压外环很容易进入饱和状态。进一步地,若在准谐振控制器中引入抗饱和环节,则很有可减弱电压外环饱和程度。故可推导出抗饱和准谐振控制器中谐振控制器的输入误差为:
[0070]eor
=e
o-e
wind
=e
o-k
wind
(i
r-i
sat
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0071]
其中,e
wind
为抗饱和控制器k
wind
的输出值,当谐振控制器处于饱和状态时,此时整理有:
[0072][0073]
其中,i
lref
为lc型变换器的电感电流指令值。
[0074]
以式(13)中i
lmax
=i
lref-k
up
e0为例,带入到式(12)可得:
[0075]eor
=eo(1-k
windkup
)-k
wind
(i
r-i
lref
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0076]
利用式(14)可知,为了减少积分饱和影响,准谐振控制器的输入误差e
or
应尽可能小。需注意的是,当负载短路故障时,输出电压误差e0无法改变。因此,式(14)中应该保证e0的系数1-k
windkup
为0,则可以大幅度减少准谐振控制器误差e
or
影响。基于此分析可知,抗饱和控制器系数k
wind
应满足:
[0077]kwind
=1/k
up
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(15)
[0078]
结合式(14)和式(15),可整理有:
[0079]eor
=k
wind
(-ir+i
lref
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0080]
可以发现准谐振控制器误差e
or
与准谐振控制器的输出值ir变成线性关系,故可以大幅度减少积分饱和影响。这一重要结论是有利于当短路故障清除时,电压外环控制器能够快速调节输出电压到额定值。
[0081]
此外,在故障过程中电感电流需要进一步调节,故电流内环指令的给定值需要进一步确定。当lc型变换器的预期最大电感电峰值为i
llimref
,即电感电流的指令值范围为[-i
llimref
,i
llimref
],结合式(11)和式(13)可进一步推导出限幅器的最大值和最小值的表达式为:
[0082][0083]
其中,i
lmax*
及i
lmin*
为限幅器的输出最大值和输出最小值,u
omax*
为输出电压给定值的最大值。通过整理式(7)、式(9)、式(10)、式(15)和式(17),可得限流控制系统的所有控制器参数为:
[0084][0085]
为了更加清楚说明本发明的有效性,图5~图6给出的是基于抗饱和准谐振控制器
的lc型变换器限流控制系统下的过载及短路故障下动态仿真结果。其中,主电路参数具体如下:lc型变换器的额定功率s为6kva,直流电压u
dc
=400v,输出电压有效值u
orms
=220v,在纯阻性情况下额定负载阻抗为8.1ω,lc型滤波器的参数为l=0.43mh,c=60μf,等效增益系数k
pwm
=800。选取主导极点的阻尼比为0.707,自然角频率为9960rad/s,电压外环基波频率处响应的基波周期倍数因子n1=0.05,电流内环基波频率处响应的预期基波周期倍数因子n2=0.25,基波周期为0.02s(对应基波频率为50hz),预期电感电流最大值i
llimref
=150a(考虑到功率开关管的耐流为200a,故为安全起见允许流过电感电流最大值为150a),预期输出电压给定值的最大值u
omax*
为312v。将上述主电路参数、系统阻尼比、及自然角频率等性能指标参数带入到式(18),可得所有控制参数如下:电压外环控制器参数为k
up
=0.2618,k
ui
=576.0162,k
wind
=3.8197,i
lmax*
=68.3,i
lmin*
=-68.3;电流内环控制器参数为k
ip
=0.0074,k
ii
=3.2757。参阅图5~图6,在时刻0.2s,负载由额定工况突加到200%过载或短路工况,在时刻0.6s,负载由200%过载或短路工况突变至额定工况。从图中可以看到,在突加200%负载或短路故障过程中,电感电流限制在150a左右。与此同时,当突卸200%负载或短路故障清除后,输出电压能够快速恢复到预期的指令值,且输出电压波形平滑过渡。
[0086]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1