一种无人机除雪控制系统的制作方法
1.本发明属于电力技术领域,涉及到一种无人机除雪控制系统。
背景技术:
2.输电线路冰雪覆盖将大大增加输电线路的重量,对杆塔稳定性造成严重影响,严重的冰雪覆盖将使得杆塔无力支撑输电线路而倒塌,进而造成大面积停电,对民生、经济都将造成不可挽回的损失。为杜绝此类问题的发生,应及时对冰雪覆盖严重的输电线路进行除冰雪操作。近年来,随着无人机的广泛应用,部分无人机被用于输电线路的小面积除冰雪作业,采用无人机可对人工无法攀爬到达的位置进行除冰雪作业,可有效保障作业安全。
3.但在使用无人机进行除冰雪作业的过程中,操作人员需要不停调整无人机的飞行方向,以使其运动轨迹始终与输电线路的走向保持一致,然而,无人机的方向不易操控掌握,无法有效保证无人机前行过程中的方向稳定性,导致除冰雪的效率低,耗时长。
技术实现要素:
4.为解决上述问题,本发明一种无人机除雪控制系统,该系统通过无人机将除雪装置安装在放置在高空输电线路上,同时通过无人机将其在高空输电线路移动,对高空输电路上的冰雪进行清除。
5.本发明提供一种无人机除雪控制系统,该系统包括:
6.除雪无人机本体、远程控制系统和通讯系统,该无人机本体为直升式无人机,该无人机本体通过通讯系统与远程控制系统相连,使远程控制系统能够远距离控制无人机在输电线路处的位置;
7.安装在无人机底部的除雪装置,所述除雪装置为杆式结构,杆式结构的中间设有方向调节装置,杆式结构的底部设有滑动槽,所述滑动槽内设有除雪滑动装置;
8.所述方向调节装置外侧为圆环结构,圆环结构的内侧设有圆弧结构的凹槽,凹槽内设有球状结构的转动端,转动端表面上设有杆体,所述圆环结构安装在杆式结构的中间,使球状结构的转动端能够在圆弧结构凹槽转动。
9.所述除雪滑动装置内设有除雪槽,其中除雪槽内部中间设有滚动轮,该滚动轮能够在输电线路上滚动,除雪槽内部两侧设有电磁转动装置,运行电磁转动装置后,能够对除雪槽内的积雪进行清除,除雪槽开口处设有电磁固定装置,能够将输电线路固定在除雪槽内;
10.所述除雪滑动装置与滑动槽之间设有电磁移动装置,通过运行电磁移动装置,使其在滑动槽内移动,控制除雪滑动装置在滑动槽内的位置;
11.用于连接无人机本体和除雪装置的调节杆,所述调节杆中间设有电磁调节装置,该电磁调节装置一端与方向调节装置中球状结构的转动端表面杆体相连,另一端通过方向转动装置与无人机本体底部相连,其中方向转动装置包括横向调节装置和纵向调节装置,能够控制除雪装置与除雪无人机之间的位置;
12.安装在无人机本体上的控制器,该控制器内设有通讯装置,该通讯装置通过所述通讯系统与远程控制系统建立远程通讯,该控制器能够控制电磁转动装置、电磁固定装置、电磁移动装置和电磁调节装置的运行,对输电线路的积雪进行清除,以及能够控制无人机本体与除雪装置之间的位置,使无人机运动前行过程中,除雪装置的方向具有稳定性。
13.进一步的所述无人机除雪控制系统还包括具有观察功能的无人机机组,该无人机机组具有多个无人机,分布在除雪无人机本体的上侧和两侧,该无人机上设有画面检测功能,能够观察除雪无人机在输电线路上的运行状态,并且该无人机通过通讯系统与远程控制系统相连,能够将检测的画面传输至远程控制系统内。
14.进一步的所述电磁转动装置包括电磁装置和转动叶片,其中转动叶片安装在电磁装置内,电磁装置运行后能够驱动转动叶片旋转,所述电磁装置与控制器相连,使控制器能够控制电磁转动装置内转动叶片的旋转,对除雪槽内侧输电线路的积雪进行清除。
15.进一步的所述电磁固定装置包括电磁装置和伸缩杆体,其中电磁装置安装在除雪槽的开口处,伸缩杆体安装在电磁装置内,在电磁装置运行后,能够驱动伸缩杆体伸出,将输电线路固定早除雪槽内,该电磁装置与控制器相连,使控制器能够控制电磁固定装置运行,能够将输电线路固定在除雪槽内。
16.进一步的所述电磁移动装置包括电磁装置和机械移动装置,其中机械移动装置安装在滑动槽内,电磁装置安装在机械移动装置上,导通电磁装置后,机械移动装置能够在滑动槽内左右移动,该电磁装置与控制器相连,使控制器能够控制电磁移动装置的运行,能够控制除雪槽与输电线路之间的位置。
17.进一步的所述电磁调节装置包括电磁装置,电磁装置安装在调节杆上,能够控制调节杆的长度,所述电磁装置通过连接线与控制器相连,通过控制器运行电磁装置,能够自动控制调节杆的长度,控制除雪无人机本体与除雪装置之间的位置。
18.进一步的所述除雪装置上设有平衡检测传感器,能够检测除雪装置的杆塔结构在输电线路上的偏移角度,所述平衡检测传感器与控制器相连,使控制器能够平衡检测传感器内的参数值。
19.进一步的所述控制器包括数字量输出模块和信号检测模块,所述数字量输出模块与电磁转动装置、电磁固定装置、电磁移动装置和电磁调节装置相连,使控制器能够控制电磁转动装置、电磁固定装置、电磁移动装置和电磁调节装置的运行,所述信号检测模块与平衡检测传感器相连,使控制器能够接受平衡检测传感器内的参数值。
附图说明
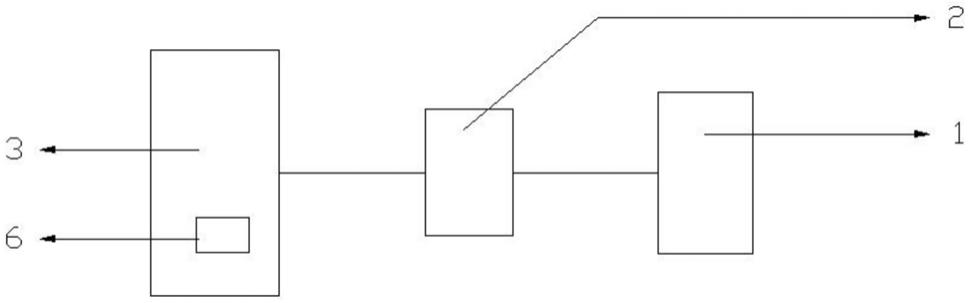
20.图1为发明一种无人机除雪控制系统整体结构示意图;
21.图2为发明一种无人机除雪控制系统中除雪装置结构示意图;
22.图3为发明一种无人机除雪控制系统中方向调节装置结构示意图;
23.图4为发明一种无人机除雪控制系统中除雪滑动装置结构示意图;
24.图5为发明一种无人机除雪控制系统中调节杆结构示意图;
25.图6为发明一种无人机除雪控制系统中平衡检测传感器安装结构示意图。
26.图中:1、除雪无人机本体;2、远程控制系统;3、通讯系统;4、除雪装置;5、调节杆;6、控制器;7、平衡检测传感器;
27.41、方向调节装置;42、滑动槽;43、除雪滑动装置;411、圆环结构;431、滚动轮;432、电磁转动装置;433、电磁固定装置;434、电磁移动装置;
28.51、电磁调节装置;52、方向转动装置。
具体实施方式
29.下面结合附图对发明一种无人机除雪控制系统的具体实施方式做详细阐述。
30.如图1所示,本发明提供了一种无人机除雪控制系统,该系统包括:
31.除雪无人机本体1、远程控制系统2和通讯系统3,该无人机本体为直升式无人机,该无人机本体通过通讯系统3与远程控制系统2相连,使远程控制系统2能够远距离控制无人机在输电线路处的位置;
32.如图2所示,安装在无人机底部的除雪装置4,所述除雪装置4为杆式结构,杆式结构的中间设有方向调节装置41,杆式结构的底部设有滑动槽42,所述滑动槽42内设有除雪滑动装置43;
33.如图3所示,方向调节装置41外侧为圆环结构411,圆环结构411的内侧设有圆弧结构的凹槽,凹槽内设有球状结构的转动端,转动端表面上设有杆体,所述圆环结构411安装在杆式结构的中间,使球状结构的转动端能够在圆弧结构凹槽转动。
34.如图4所示,除雪滑动装置43内设有除雪槽,其中除雪槽内部中间设有滚动轮431,该滚动轮431能够在输电线路上滚动,除雪槽内部两侧设有电磁转动装置432,运行电磁转动装置432后,能够对除雪槽内的积雪进行清除,除雪槽开口处设有电磁固定装置,能够将输电线路固定在除雪槽内;
35.所述除雪滑动装置43与滑动槽42之间设有电磁移动装置434,通过运行电磁移动装置434,使其在滑动槽42内移动,控制除雪滑动装置43在滑动槽42内的位置;
36.如图5所示,用于连接无人机本体和除雪装置4的调节杆5,所述调节杆5中间设有电磁调节装置51,该电磁调节装置51一端与方向调节装置41中球状结构的转动端表面杆体相连,另一端通过方向转动装置52与无人机本体底部相连,其中方向转动装置52包括横向调节装置和纵向调节装置,能够控制除雪装置4与除雪无人机之间的位置;
37.安装在无人机本体上的控制器6,该控制器6内设有通讯装置,该通讯装置通过所述通讯系统3与远程控制系统2建立远程通讯,该控制器6能够控制电磁转动装置432、电磁固定装置、电磁移动装置434和电磁调节装置51的运行,对输电线路的积雪进行清除,以及能够控制无人机本体与除雪装置4之间的位置,使无人机运动前行过程中,除雪装置4的方向具有稳定性。
38.根据上述,其中所述无人机除雪控制系统还包括具有观察功能的无人机机组,该无人机机组具有多个无人机,分布在除雪无人机本体1的上侧和两侧,该无人机上设有画面检测功能,能够观察除雪无人机在输电线路上的运行状态,并且该无人机通过通讯系统3与远程控制系统2相连,能够将检测的画面传输至远程控制系统2内。
39.根据上述,其中所述电磁转动装置432包括电磁装置和转动叶片,其中转动叶片安装在电磁装置内,电磁装置运行后能够驱动转动叶片旋转,所述电磁装置与控制器6相连,使控制器6能够控制电磁转动装置432内转动叶片的旋转,对除雪槽内侧输电线路的积雪进行清除。
40.根据上述,其中所述电磁固定装置包括电磁装置和伸缩杆体,其中电磁装置安装在除雪槽的开口处,伸缩杆体安装在电磁装置内,在电磁装置运行后,能够驱动伸缩杆体伸出,将输电线路固定早除雪槽内,该电磁装置与控制器6相连,使控制器6能够控制电磁固定装置运行,能够将输电线路固定在除雪槽内。
41.根据上述,其中所述电磁移动装置434包括电磁装置和机械移动装置,其中机械移动装置安装在滑动槽42内,电磁装置安装在机械移动装置上,导通电磁装置后,机械移动装置能够在滑动槽42内左右移动,该电磁装置与控制器6相连,使控制器6能够控制电磁移动装置434的运行,能够控制除雪槽与输电线路之间的位置。
42.根据上述,其中所述电磁调节装置51包括电磁装置,电磁装置安装在调节杆5上,能够控制调节杆5的长度,所述电磁装置通过连接线与控制器6相连,通过控制器6运行电磁装置,能够自动控制调节杆5的长度,控制除雪无人机本体1与除雪装置4之间的位置。
43.如图6所示,其中所述除雪装置4上设有平衡检测传感器7,能够检测除雪装置4的杆塔结构在输电线路上的偏移角度,所述平衡检测传感器7与控制器6相连,使控制器6能够平衡检测传感器7内的参数值。
44.根据上述,其中所述控制器6包括数字量输出模块和信号检测模块,所述数字量输出模块与电磁转动装置432、电磁固定装置、电磁移动装置434和电磁调节装置51相连,使控制器6能够控制电磁转动装置432、电磁固定装置、电磁移动装置434和电磁调节装置51的运行,所述信号检测模块与平衡检测传感器7相连,使控制器6能够接受平衡检测传感器7内的参数值。
45.一种无人机除雪控制系统的工作方式如下所示:
46.运行除雪无人机本体1,使安装在无人机底部的除雪装置4靠近输电线路上,其中将除雪无人机本体1放置在输电线路上有以下方式,
47.1、将除雪无人机本体1运行至输电线路上端,通过运行调节杆5上的电磁调节装置51,控制调节杆5的长度,使除雪装置4能够放置在输电线路上;
48.2、除雪滑动装置43与滑动槽42之间设有电磁移动装置434,通过运行电磁移动装置434,使其在滑动槽42内移动,控制除雪滑动装置43在滑动槽42内的位置。
49.在除雪装置4安装过程中可以通过观察功能的无人机机组观察除雪无人机在输电线路上的位置,并将传输的画面输送至远程控制系统2内。
50.除雪滑动装置43放置在输电线路上后,运行电磁固定装置,驱动伸缩杆体伸出,将输电线路固定早除雪槽内,然后运行电磁转动装置432,使转动叶片对输电线路上的积雪进行清扫。
51.无人机拖动在输电线路上的除雪装置4,使其在输电线路上移动,在移动过程中,电磁转动装置432运行,驱动转动叶片对输电线路上的积雪持续进行清扫。
52.最后应该说明的是,结合上述实施例仅说明本发明的技术方案而非对其限制。所属领域的普通技术人员应当理解到,本领域技术人员可以对本发明的具体实施方式进行修改或者等同替换,但这些修改或变更均在申请待批的权利要求保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1