用于电动机器的转子以及具有转子的电动机器的制作方法
1.本发明涉及一种用于电动机器的转子。本发明还涉及一种具有这种转子的电动机器。
背景技术:
2.例如de 10 2006 021 489 a1公开了一种具有定子和转子的电动机器。电动机器被设计为永磁同步电机,其中转子具有转子体,该转子体具有布置在该转子体的内部的永磁体和磁通屏障(flussbarrieren)。永磁体形成电动机器的磁极,其中在每个磁极的区域中布置有至少一个永磁体。
3.为了能够最佳地驱动电动机器,尤其重要的是,借助于传感器来检测转子的状态参量并且将其供应给电动机器的控制装置。迄今为止,很难为被指配给电动机器的转子并随转子一起转动的这种传感器供应足够的电能。
4.例如,电动机器的持续功率尤其受转子(尤其永磁同步电机中的磁体或异步电机中的笼)的最大允许温度的限制。在电动机器运行时,当前转子温度一般来说不是作为测量参量而已知的,而是借助于温度模型进行估算。这导致必须将与最大温度的安全距离规划在内,因此,由于这个安全距离,电动机器无法最佳地运行。如果超过最大温度,则存在电动机器过热和损坏的风险。
技术实现要素:
5.本发明的目的在于,进一步开发一种用于电动机器的转子以及一种电动机器。尤其应借助于该转子来改善电动机器的运行并且降低电动机器过热的风险。此外,该转子应是简单并且快速地可装配的。
6.一种用于以脉冲式电压运行的电动机器的根据本发明的转子,所述转子具有:至少一个传感器元件,所述至少一个传感器元件被配置成检测所述转子的至少一个状态参量;与所述至少一个传感器元件连接的信号处理单元,所述信号处理单元被配置成根据检测到的所述转子的状态参量生成测量数据并且将所述测量数据传输至控制装置;以及至少一个感应线圈,所述至少一个感应线圈具有至少一个电导体并且至少间接地布置在所述转子的端侧,其中所述感应线圈与所述基波场的调制相调谐并且被配置成从在所述电动机器以脉冲式电压运行期间形成的端部杂散场的基波场生成电能。
7.换言之,以脉冲式电压运行的电动机器的转子具有该至少一个传感器元件(任选地多个传感器元件)以及信号处理单元和带有该至少一个电导体的该至少一个感应线圈。该至少一个传感器元件、信号处理单元、以及该至少一个感应线圈尤其位置固定地与转子连接并且因此与转子一起转动。
8.优选地,所述至少一个感应线圈被配置成给所述信号处理单元和/或所述至少一个传感器元件供应电能。因此,要么给该信号处理单元供应电能,要么给该至少一个传感器元件供应电能,要么给该信号处理单元和该至少一个传感器元件供应电能。
9.有利地,用于使电动机器运行的脉冲式输出电压借助于变频器来产生。借助于该至少一个感应线圈,可以在电动机器以脉冲式电压进行的运行中实现从端部杂散磁场的基波场中获取电能。因为基波场是通过变频器的脉冲式馈送来调制的。该至少一个感应线圈与基波场的调制相调谐并且在转子旋转时被变化的端部杂散场通过,由此在该至少一个感应线圈中产生电流或电压,该电压被用于给防旋转地布置在转子上并且与转子一起转动的该至少一个传感器元件和/或信号处理装置供应电能。因此,可以省去用于给随转子转动的部件供应电能的滑环和电池,由此可以简单并且快速地装配转子。此外,借助于该至少一个感应线圈生成电能与转子的特定转速范围无关,因为磁场的频率与转子的转速不是硬性关联的。该至少一个感应线圈布置在转子的端侧是特别有利的,因为该至少一个感应线圈由此不与转子的活动部分接合。
10.为了借助于电动机器产生期望的转矩,给电动机器馈送多相正弦电流。通常,该正弦电流由开关转换器产生,该转换器通过适合的切换过程从直流电压中间电路产生脉冲式的、近似矩形的电压。通过脉冲宽度调制和电流调节来近似正弦电流,然而该正弦电流除了基波振荡之外还包含谐波振荡。这些谐波振荡还在定子磁场中导致相同频率的谐波振荡。从相对于转子固定的观测器来看,这些谐波振荡表现为时变分量,这些时变分量叠加在基波场上,该基波场从转子观察在时间上是恒定的或者在异步电机的情况下是低频的。这些时变分量具有与基波场相同的空间波长并且随基波场转动。因此,在同步电机中,从转子观察是驻波。在异步电机中,相对于同步转速而言是驻波。基波的波长与磁极距相对应。
11.端部杂散磁场在转子的两个端侧上形成并且具有从定子向转子延伸的场力线。尤其,端部杂散磁场受定子的绕组头影响。从磁性角度看,磁路中的场力线平行于气隙中的场力线。由此得出,在端部杂散场中包含了相同的调制,这些调制还存在于气隙场中。然而,端部杂散场中的场力线的几何方向与气隙场中的场力线的方向不同。气隙场中的场力线大体上沿垂直于转子轴线的平面延伸,而端部杂散场中的场力线具有轴向分量。在电动机器的纯正弦馈送中,转动的磁场在同步电机中从转子来看是在时间上恒定的,或者在异步电机中从以同步转速转动的观测器来看是在时间上恒定的。然而,由于转换器对电动机器的脉冲式馈送,给该场叠加了随时间变化的分量。由此,在位于端部杂散场中并且与转子机械固定连接的线圈中产生电压。因此,可以借由这种感应线圈生成电能。
12.该至少一个传感器元件可以无中介地布置在转子上并且在那直接地检测转子的状态参量、尤其转子的温度,以降低电动机器过热的风险。该至少一个传感器元件适合用于检测绝对温度并且适合用于检测温差。例如,转子的温度是转子的状态参量。例如,该至少一个传感器元件直接地或至少邻接地布置在状态参量的产生位置。该至少一个传感器元件与状态参量的产生位置之间的较短测量路径提高了测量准确性。
13.优选地,至少在该至少一个感应线圈与该至少一个传感器元件之间优选地借助于感应以无线的方式进行电能传输。替代性地,该至少一个传感器元件可以借助于布线与该至少一个感应线圈连接。
14.尤其,信号处理单元以无线的方式与控制装置连接以用于信号传输或数据传输。该至少一个传感器元件优选借由布线与信号处理单元连接以用于信号传输或数据传输。例如,控制装置布置在转子外部,然而布置在车辆内部。
15.根据本发明的一个优选的实施方式,该至少一个感应线圈布置在转子上的磁极
内,其中该至少一个感应线圈的线圈宽度大体上恰好与磁极距相对应。
16.根据本发明的一个优选的实施方式,该至少一个感应线圈布置在转子上的磁极内,其中该至少一个感应线圈的线圈宽度与磁极距的至少50%至150%相对应。
17.在一个优选的实施方式中,出线导体是感应线圈的线圈导体的如下区段,该区段在转子端侧大体上在径向上从内向外或从外向内的方向上引导。回线导体是线圈导体的另外的区段,该另外的区段在转子端侧大体上在径向上从内向外或从外向内的方向上引导。磁极距将端面分成圆弧段,其中每个圆弧段与一个磁极相对应。在下文中,磁极距被理解为如此限定的圆弧段在周向方向上的延伸尺寸。换言之,转子端侧的磁极距与围绕转子轴线的极坐标系的角度相对应。在此,出线导体与回线导体之间的距离大致与磁极距相对应。如果感应线圈具有多个匝,则平均距离大致与磁极距相对应。优选地,出线导体与回线导体的平均距离是磁极距的0.5至1.5倍。
18.根据本发明的一个优选的实施方式,感应线圈的轴线与转子的旋转轴线大体上平行地形成。换言之,感应线圈和转子是大体上彼此轴线平行地布置的。
19.根据本发明的一个优选的实施方式,信号处理单元至少间接地布置在转子的端侧。替代性地或补充地,该至少一个传感器元件优选至少间接地布置在转子的端侧。部件至少间接地布置在转子上应理解为,该部件可以要么无中介地(即直接地)布置在转子上),要么借由唯一的另外的部件(即间接地借由该另外的部件)布置在转子上。
20.例如,该至少一个传感器元件布置在转子的在电动机器负载情况下特别强烈地变热的区域中。至少信号处理单元、任选地还有该至少一个传感器元件至少间接地布置在端侧是有利的,因为对转子的特性、尤其电动机器的电磁特性没有负面影响。此外,转子的端侧对于装配和维护而言都是特别易于触及的,由此可以简单并且快速地装配转子和其上布置的元件。
21.根据本发明的一个优选的实施方式,该至少一个传感器元件集成在信号处理单元中。因此,该至少一个传感器元件和信号处理单元形成布置在转子上的唯一的部件。
22.根据本发明的一个优选的实施方式,该至少一个传感器元件布置在转子的内部。换言之,该至少一个传感器元件不是布置在转子的表面上,而是布置在转子的凹部中。尤其,该至少一个传感器元件布置在转子的内部,使得状态参量的产生位置紧靠传感器元件。
23.根据本发明的一个优选的实施方式,该至少一个感应线圈布置在电路板上。这个实施方式不仅特别容易装配,而且优化生产。电路板应被理解为印刷电路板,即具有两个相对较大的端面的扁平的元件,其中这些端面中的一个端面被设计成用于布置在转子上,并且另一个端面被设计成用于容纳感应线圈。例如,导体布置在电路板的端侧并且与电路板固定连接,以便在电路板上形成感应线圈。优选地,电路板布置在转子的端侧并且直接与转子接触。例如,电路板借助于粘合剂固定在转子的端侧。因此,在转子的端侧与电路板的指向转子的端侧之间不存在另外的部件,而是任选地仅布置有粘合剂。粘合剂可以点状地、至少部分面状地或全面地施加在转子与电路板之间。例如,电路板是刚性地或者至少部分柔性地且部分刚性地、尤其半柔性地形成的。刚性的电路板提供如下优点:即使在转子的转速较高的情况下也能保持较高的强度和形状稳定性。
24.根据本发明的一个优选的实施方式,信号处理单元集成在电路板中。因此,信号处理单元是电路板的固定组成部分。通过集成来节省单独的部件。
25.根据本发明的一个优选的实施方式,该至少一个感应线圈的导体集成在电路板中,即是电路板的固定组成部分。尤其,该至少一个感应线圈的导体被印刷到电路板上。通过集成来节省单独的部件。优选地,所述至少一个感应线圈的导体具有在径向方向上形成的多个齿。例如,导体的相应的齿在周向方向上延伸过整个磁极距或磁极距的至少50%。这些齿是均匀分布地设计的。例如,转子的磁极对数为三,其中导体对应地具有三个齿,这些齿在周向方向上环绕地布置在邻接电路板的外周的区域中。优选地,导体的齿数与转子的磁极对数相对应。
26.根据本发明的电动机器包括:变频器,所述变频器被配置成产生用于使所述电动机器运行的脉冲式输出电压;用于控制所述电动机器的控制装置;以及定子和根据本发明的转子。在定子与转子之间形成有气隙。控制装置优选地布置在车辆中并且用于控制和调节电动机器。尤其,电动机器被设计为旋转磁场电机。变频器尤其提供脉冲式输出电压。通过电流调节结合脉冲生成方法(例如通过脉冲宽度调制)来产生期望的、周期性变换的电流走向。
27.本发明还涉及一种具有根据本发明的电动机器的车辆。尤其,车辆被设计为机动车辆(例如pkw,乘用机动车辆),其中电动机器被配置为车辆的驱动机器,以便至少部分或完全电驱动车辆。因此,车辆优选地被设计为混合动力车辆或电动车辆。
附图说明
28.下面将根据附图详细阐述本发明的多个优选的实施方式,其中相同的元件设有相同的附图标记。在附图中:
29.图1示出具有根据本发明的电动机器的车辆的高度简化的示意性图示,
30.图2示出根据本发明的具有定子和转子的电动机器的高度简化的示意性纵截面图示,
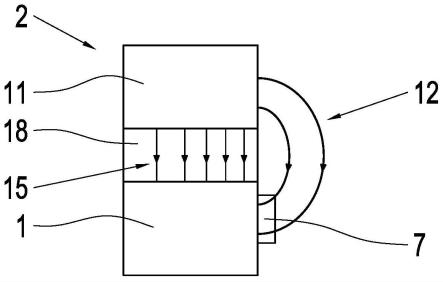
31.图3示出根据图2的本发明的电动机器的一部分的高度简化的示意性细节图示,
32.图4示出根据图2和图3的转子的高度简化的示意性侧视图,
33.图5示出根据第二实施例的转子的高度简化的示意性纵截面图示,以及
34.图6示出根据第三实施例的转子的高度简化的示意性侧视图。
具体实施方式
35.根据图1,车辆100包括根据本发明的电动机器2,该电动机器被配置成用于驱动车辆100。在此,电动机器2被设计为旋转磁场马达(drehfeldmotor)。为此,电动机器2具有驱动作用,例如借由轴17并且任选地借由其他的部件与车辆100的驱动车轮20相连接。此外,电动机器2由布置在车辆100中的控制装置5操控并且驱动。尤其,控制装置5用于在运行期间保护电动机器2以防过热,其方式为:电动机器2的最大功率尤其与转子1的当前测量到的温度相适配。为此,控制装置5以传输信号的方式与电动机器2连接。
36.图2示出电动机器2,该电动机器具有用于控制电动机器2的控制装置5以及定子11和转子1。此外,电动机器2具有变频器200,该变频器产生用于使电动机器2运行的脉冲式输出电压。在定子11与转子1之间形成有气隙18。转子1与转子轴14防旋转地连接。在电动机器2的壳体13中,在转子1的端侧布置有具有传感器元件3的信号处理单元4。传感器元件3集成
在信号处理单元4中。替代性地,传感器元件3可以布置在转子1的内部。此外,感应线圈7布置在转子1的端侧并且被配置成用于生成电能,以便给传感器元件3以及信号处理单元4供应电能。感应线圈7的轴线a与转子1的旋转轴线b大体上平行地形成。定子11具有被设计为定子叠片组的定子体以及多个被定子体容纳的线圈以及在两侧从定子11轴向伸出的绕组头16。转子1具有被设计为转子叠片组的转子体和布置在转子体的内部的多个永磁体。
37.传感器元件3检测转子1上的温度作为转子1的状态参量并且将该状态参量传输给信号处理单元4。任选地,在转子1上可以布置有多个传感器元件3,这些传感器元件例如检测转子1的不同状态参量。信号处理单元4根据检测到的转子1的状态参量生成测量数据并且将这些测量数据传输至安装在车辆100中的控制装置5。控制装置5通过无线的方式、例如经由无线电与转子1上的信号处理装置4连接,并且被配置成在考虑驾驶员的要求以及电动机器2的运行参数(尤其转子1的运行参数或状态参量)的情况下操控电动机器2。
38.图3示出以脉冲式电压运行的图2的电动机器2的放大的部分。转子1可旋转地布置在定子11的内部,其中在定子11与转子1之间形成有气隙18。在气隙18中,在定子11的内周表面与转子1的外周表面之间形成磁场15。此外,还在端侧形成从定子11到转子1的端部杂散磁场12。感应线圈7与基波场的调制相调谐并且被配置成从在电动机器2以脉冲式电压运行期间形成的端部杂散磁场12的基波场生成电能,以便将该电能供应给传感器元件3和信号处理单元4。替代性地,可以布置有用于从随时间变化的端部杂散磁场12生成电能的另外的感应线圈7。
39.图4示出根据图2和图3的转子1的端侧。省略了定子。感应线圈7布置在转子1上的磁极内,其中感应线圈7的线圈宽度6大体上恰好与磁极距p相对应。在此,转子1的磁极对数为三,即具有总共6个磁极。线圈宽度6给出在周向方向上在感应线圈7的导体8的相反的导体区段之间的距离。信号处理单元4直接布置在转子1的端侧,其中传感器元件3集成在信号处理单元4中。感应线圈7借由电导线19与信号处理单元4和集成在其中的传感器元件3相连接。为了将交流电流转换成直流电流并且为传感器元件3提供直流电流,信号处理单元4例如具有未详细展示、然而通常已知的谐振电路、整流器、以及电容器。
40.在图5中展示了转子1的第二实施方式。在此,感应线圈7布置在电路板10上,其中电路板10布置在转子1的端侧并且直接与转子1接触。电路板10与转子1之间的粘合剂将电路板10固定在转子1的端侧。在此,电路板10布置在转子1上的磁极内。信号处理单元4集成在电路板10中,并且传感器元件3布置在转子1的内部。信号处理单元4、传感器元件3、以及感应线圈7借由电导线19相互操作性连接。
41.图6示出转子1的第三实施方式,其中在此仅能够看到布置在该转子上的电路板10的端侧。与根据图5的电路板10不同,根据转子1的第三实施方式,感应线圈7的导体8集成在电路板10(在此被设计为印刷的导体线路)中。导体8是在周向方向上环绕且不重叠地在邻接电路板10的外周的区域中形成的。此外,导体8在径向方向上具有三个齿9。所有的齿9被设计为相同的并且在环向上均匀分布,其中每个齿9布置在转子1上的磁极内并且延伸成使其尺寸大体上恰好与磁极距p相对应。在此,转子1的磁极对数为三,即具有总共6个磁极。信号处理单元4与传感器元件3一起集成在电路板10中。信号处理单元4和感应线圈7借由电导线19相互操作性连接。电路板10的直径大体上与转子1的直径相对应。
42.附图标记清单
[0043]1ꢀꢀꢀꢀ
转子
[0044]2ꢀꢀꢀꢀ
电动机器
[0045]3ꢀꢀꢀꢀ
传感器元件
[0046]4ꢀꢀꢀꢀ
信号处理单元
[0047]5ꢀꢀꢀꢀ
控制装置
[0048]6ꢀꢀꢀꢀ
线圈宽度
[0049]7ꢀꢀꢀꢀ
感应线圈
[0050]8ꢀꢀꢀꢀ
电导体
[0051]9ꢀꢀꢀꢀ
齿
[0052]
10
ꢀꢀꢀ
电路板
[0053]
11
ꢀꢀꢀ
定子
[0054]
12
ꢀꢀꢀ
端部杂散场
[0055]
13
ꢀꢀꢀ
壳体
[0056]
14
ꢀꢀꢀ
转子轴
[0057]
15
ꢀꢀꢀ
气隙中的磁场
[0058]
16
ꢀꢀꢀ
绕组头
[0059]
17
ꢀꢀꢀ
轴
[0060]
18
ꢀꢀꢀ
气隙
[0061]
19
ꢀꢀꢀ
电导线
[0062]
20
ꢀꢀꢀ
驱动车轮
[0063]
100
ꢀꢀ
车辆
[0064]
200
ꢀꢀ
变频器
[0065]aꢀꢀꢀꢀ
感应线圈的轴线
[0066]bꢀꢀꢀꢀ
转子的旋转轴线
[0067]
p
ꢀꢀꢀꢀ
磁极距
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1